

1.5 Решение 1-й системы нелинейных уравнений
В подпункте 1.1 исполняемого файла вычисляемым неизвестным параметрам присваиваются грубо приближенные значения, так называемые первые приближения аргументов. Эти значения принимаются за счет грубой оценки возможных интервалов вариации данных параметров. Ввод первых приближений осуществляется так же, как ввод ИД.
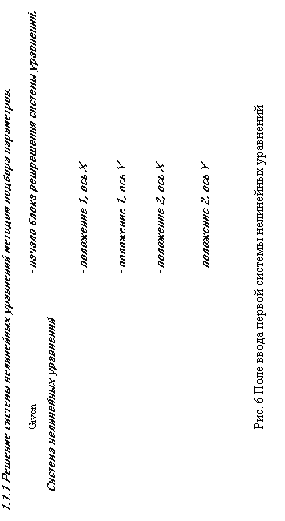
В подпункте 1.1.1 необходимо в определенном поле ввода (рис. 6) записать систему нелинейных уравнений, описывающую положения ШСУ на максимальном и минимальном вылетах (формулы 1-4).
Переменные необходимо подставлять в том же виде, в каком они представлены выше. Лучше всего воспользоваться копированием вышеприведенных переменных через буфер обмена в составляемое уравнение. При подстановке функций целесообразно пользоваться кнопками математической палитры или горячими клавишами (прил. 3, [2]), а не набирать их по буквам с клавиатуры.
Приравнивая левые части уравнений правым, необходимо разделять их знаком «Эквивалентно», который вставляется путем одновременного нажатия клавиш основной клавиатуры «Ctrl» и «+». При нажатии этих клавиш, в месте нахождения курсора появится знак «=». Эти четыре уравнения могут записываться в произвольной форме (однако, не нарушая равенств). После чего, в пп. 1.1.2 автоматически отображаются результаты решения системы нелинейных уравнений.
1.6 Определение недостающих параметров шсу (длины оттяжки и координат точки крепления оттяжки)
В пп. 2.1 записаны два выражения: первое – «lx3:=lx(0.4+N0.03)», служит для определения длины хобота в зависимости от номера опыта, второе – «lx:=» предназначено для присвоения значения длине заднего плеча хобота вручную. Длине заднего плеча хобота присваивается значение, данное в задании (приложение 1).
Следующие два подпункта посвящены определению длины оттяжки и координат точки крепления оттяжки. Определение этих параметров осуществляется на основании предположения, что на среднем вылете отклонение конца хобота от первоначальной высоты, как и на максимальном и минимальном вылетах, будет равно 0.
В пп. 2.2 определяется угол наклона стрелы на среднем вылете. На этом этапе, в знаменатель выражения, представленного в данном подпункте, необходимо вставить цифру, деление на которую обеспечит получение верного значения среднего угла (среднее арифметическое двух чисел равно их полусумме). Подставив необходимую цифру и кликнув мышкой за пределами поля выражения, в том же пп. автоматически будет рассчитано значение среднего угла наклона стрелы к горизонтали.
Далее, в пп. 2.3.1 определяются координаты конца заднего плеча хобота на трех вылетах стрелы и, соответственно, подвижного конца оттяжки. Во все приведенные выражения вместо пропущенного числа, обозначенного прямоугольным курсором, нужно подставить соответствующие обозначения углов наклона стрелы и хобота (рис. 7).

Рис. 7 Схема ШСУ для определения длины оттяжки и координат крепления ее конца.
Там же, в этих пп., автоматически определяются текущие значения координат подвижного конца оттяжки. За начало координат принята ось качания стрелы.
В пп. 2.3.2 определяются собственно координаты неподвижного конца оттяжки и ее длина. По рассмотрении трех прямоугольных треугольников, образуемых оттяжкой, горизонтальной линией, проходящей через точку крепления оттяжки, и вертикальными линиями, проходящими через конец заднего плеча хобота (на трех положениях стрелы), составляется система трех нелинейных уравнений, два недостающие уравнения которой вписываются в пп. 2.3.2.2 в соответствующее поле (рис. 8). После чего, в пп. 2.3.2.1 подставляем соответствующие первые приближения искомых величин. И, таким образом, в пп. 2.3.2.3 будут приведены недостающие параметры ШСУ. Теперь, построение траектории движения груза (конца хобота) становится возможным.