

ЛАБОРАТОРНА РОБОТА № 4B-К(Mass)
МАСОВИЙ ВИТРАТОМІР ТА ГУСТИНОМІР ТИПУ SITRANS FC MASSFLO
1. Мета роботи
1.Вивчити принцип дії, конструкцію та методику повірки масового витратоміра фірми «Siemens» Sitrans FC Massflo.
2.Провести повірку масового витратоміра та густиноміра.
2. Завдання на виконання роботи
2. 1. Познайомитись з лабораторним стендом.
2.2. Вивчити основні поняття про густину речовини і методи її вимірювання.
2.3. Вивчити загальну теорію методу вимірювання витрати та густини продукту по принципу Коріоліса та структурну схему його реалізації.
2.4. Вивчити будову, склад, призначення та структурну схему витратоміра Sitrans FC Massflo 6000.
2.5. Зняти реальну статичну характеристику перетворення витратоміра.
2.6. По статичним характеристикам перетворення визначити варацію, абсолютну, відносну та приведену похибки витратоміра.
2.6. Побудувати графіки:
а) реальних статичних характеристик перетворення;
б)
залежності відносних та приведених
похибок по отриманому діапазону
вимірювання (точки наносити через кожних
0,2 м![]() /год.).
/год.).
3. Основні теоретичні відомості
3.1. Призначення та принцип дії витратоміра – густиноміра Sitrans fc Massflo
Витратомір-густиномір Sitrans F C Massflo призначений для прямого вимірювання витрати маси та густини, температури, обчислення об’єму витрати рідин, газів та суспензій. Всі вимірювання виконуються в реальному масштабі часу. Фірма «Siemens» випускає декілька модифікацій датчиків витрати (сенсорів) та мікропроцесорних перетворювачів до них, які дозволяють вирішував задачі по автоматизації різних об’єктів.
Широкий
вибір перетворювачів, вміщує моделі,
що сконструйовані на основі MVD![]() технології, призначених для розміщення
в небезпечних зонах технологічних
процесів (вибухонебезпечних), а також
моделі, які інтегрально вмонтовуються
на сенсорі. Мікропроцесорні перетворювачі
підтримують комунікаційні протоколи
по обміну інформацією HART,
Modbus,
Profibus
і ін.
технології, призначених для розміщення
в небезпечних зонах технологічних
процесів (вибухонебезпечних), а також
моделі, які інтегрально вмонтовуються
на сенсорі. Мікропроцесорні перетворювачі
підтримують комунікаційні протоколи
по обміну інформацією HART,
Modbus,
Profibus
і ін.
Kоріолісовий витратомір Sitrans FC Massflo складається із первинного вимірювального перетворювача (сенсора) витрати MASS 2100/M (Рис.1а) та вимірювального мікропроцесорного перетворювача MASS 6000 (Рис. 1б). Сенсор безпосередньо вимірює витрату, густину і температуру, а перетворювач - конвертує отриману від сенсора інформацію в цифрову форму та стандартні вихідні сигнали.
Рис.1а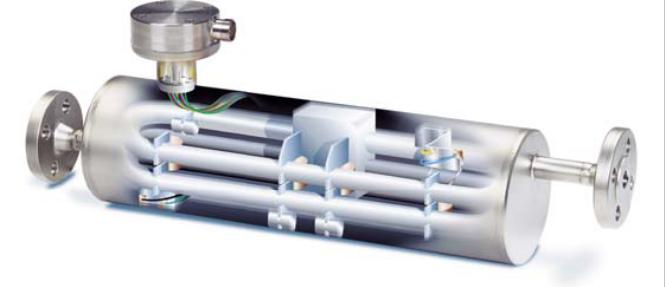

Рис.1б
В свою чергу ПВП MASS 2100/M складається із двох U-подібно зігнутих сенсорних трубок (рис.2), площини згину яких паралельні трубопроводу з вимірюваним середовищем і які розділяють вимірюване за витратами середовище на рівні половини, що протікають через кожну із сенсорних трубок.
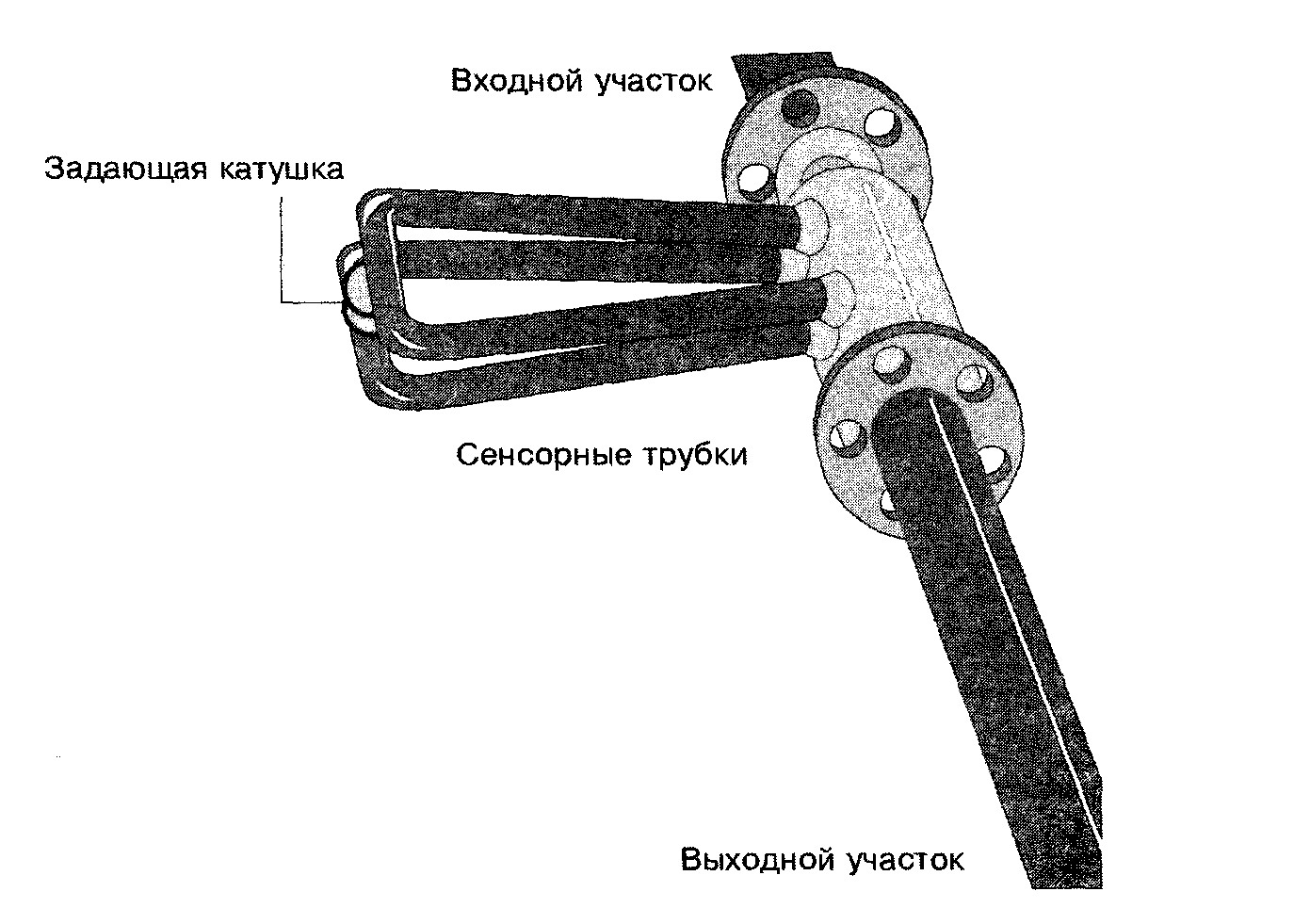
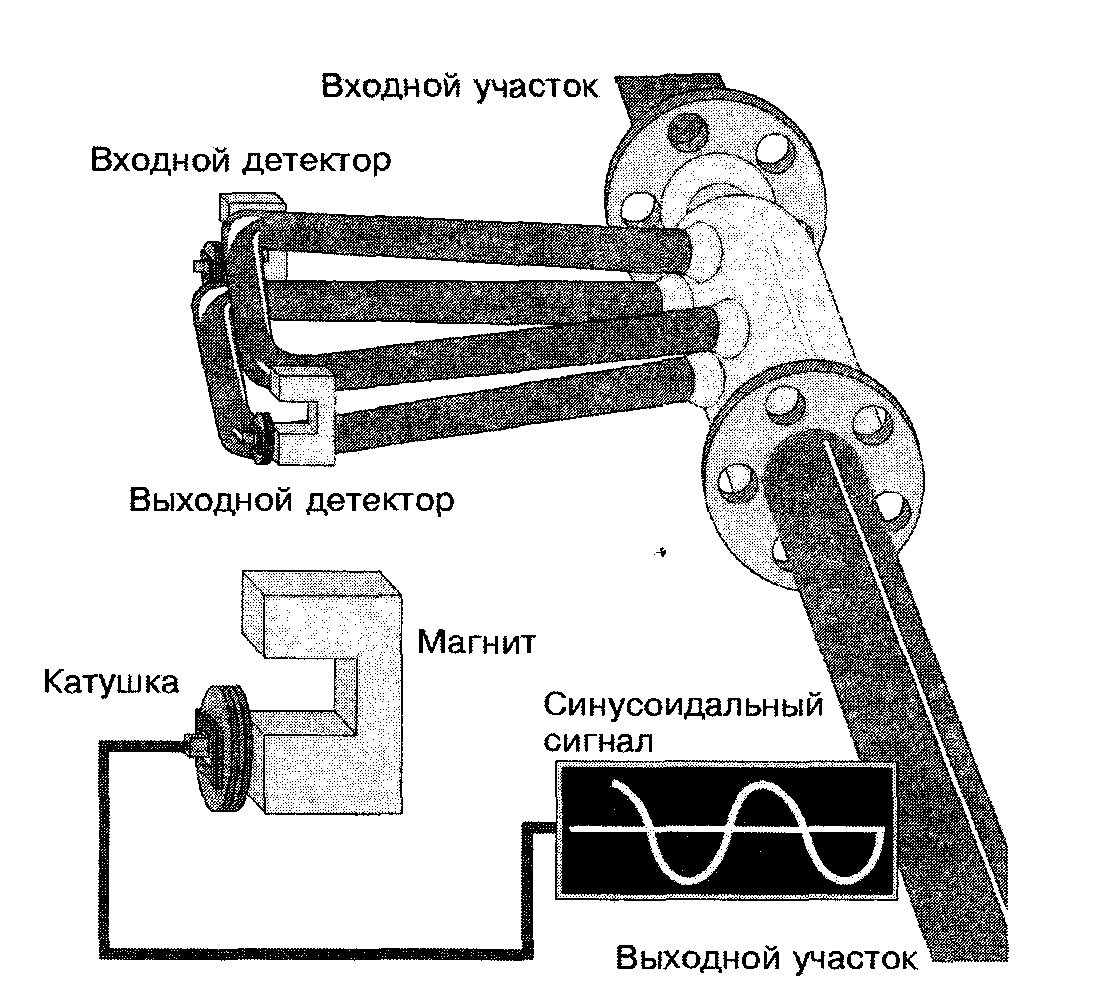 Рис.
3.
Рис.
2.
Рис.
3.
Рис.
2.

Сигнал правого детектора Сигнал правого детектора
Рис.4. Рис.5.
Сенсорні трубки закріплені до основного трубопроводу так, що їхні площини утворюють між собою деякий кут. Між площинами трубок на одинаковій відстані від середини згину трубок і симетрично їм, розташована задаюча електромагнітна котушка, яка через спеціальний электромеханічний ланцюг збуджує механічні коливання сенсорних трубок, при чому трубки коливаються вверх-вниз у протилежних напрямках по відношенню одна до одної. Збудження самої електромагнітної котушки відбувається від задаючого електронного генератора сінусоїдальної форми коливань. При русі вимірюваного середовища через трубку-сенсор з'являється фізичне явище, відоме як ефект Коріоліса (рис. 2).
Коріоліса сила – одна із сил інерції, яка враховує вплив обертання рухомої системи відліку на відносний рух тіла. Ця сила пояснює закон Бера, який стверджує, що річки, що протікають вздовж мередіану, в північній півкулі підмивають правий берег, а в південній – лівий. Все пояснюється впливом прискорення Коріоліса та сили Коріоліса при добовому обертанні Землі на рух частинок води в річці. Прискорення Коріоліса (прискорення обертання) – це частина повного прискорення тіла, яке з’являється при його русі в обертальній системі відліку. Наприклад, для пояснення закону Бера - це по рух потоку води в річці по поверхні у вигляді кулі, яка в свою чергу обертається навколо осі.
Суть використовування ефекту Коріоліса в перевинному вимірювальному перетворювачі витрати полягає в тому, що поступальний рух середовища в U-подібній сенсорній трубці розділяться на 2 фази: рух середовища від основного трубопроводу до середини згину (вхідна сторона) та зворотний рух рух до трубопроводу (вихідна сторона), причому цей рух здійснюється при одночасному сінусоїдальному коливанні площин обох трубок в протилежних напрямках. Це приводить до виникнення коріолісового прискорення, яке свою чергу, приводить до появи сили Коріоліса. Сила Коріоліса спрямована в сторону протилежну напрямку руху трубки, що заданий електромеханічним ланцюгом збудження її коливань. Тобто, коли трубка рухається, наприклад, вверх під час половини її власного циклу, то для середовища, що її наповнює і рухається від основного трубопроводу до згину, сила Коріоліса спрямована вниз. Але, як тільки рідина проходить вигин трубки і рухається в зворотному напрямку, то для цієї ж половини власного циклу коливань трубки напрямок сили Коріоліса змінюється на протилежний. Таким чином, у вхідній половині трубки сила, що діє з боку середовища у трубці, перешкоджає переміщенню трубки, а у вихідній половині навпаки – прискорює це переміщення. Останнє призводить до деякої деформації (вигину) U-подібної трубки. Коли в другій фазі вібраційного циклу трубка рухається вниз, напрямок вигину міняється на протилежний.
Для вимірювання цієї деформації використовуються спеціальні фазові детектори, які вимірюють фазовий зсув при скручуванні сторін сенсорної трубки (вхідної та вихідної). Детектори являють собою збірки постійних магнітів та котушок - селеноїдів, які установлені на сенсорних трубках на вхідній та вихідній половинах (рис. 3). Котушки детекторів на вході та виході змонтовані на одній трубці, магніти на іншій. Кожна котушка рухається крізь однорідне магнітне поле постійного магніту. Індукована напруга від кожної котушки детектора має форму синусоїдальної хвилі. Ці сигнали являють собою рух однієї трубки щодо іншої.
Коли витрата відсутня, синусоїдальні сигнали, що надходять вхідного та вихідного детекторів, перебувають в одній фазі (на рис. 4 показані сигнали
детекторів для цього випадку: зверху - на вході, а знизу – на виході).
При наявності витрати вимірюваного середовища, за рахунок сили Коріоліса з’являється вигин (зміщення) сенсорних трубок і сигнали, що виробляються детекторами, не збігаються по фазі, тому що сигнал від вхідної сторони запізнюється стосовно сигналу з вихідної сторони (рис. 5). Різниця фаз між сигналами детекторів виміряється та перетворюється мікропроцесорним перетворювачем в час (в мікросекунди) і прямо пропорційна масовій витраті. Чим більше витрати, тим швидше протікає продукт по сенсорним трубкам, тим більше сила Коріоліса, а отже й величина вигину сенсорної трубки і відповідно зростає фазовий зсув сигналів, який прямо пропорційний масовій витраті продукту.
ПВП MASS 2100/M одночасно вимірює густину середовища, яке протікає через сенсор. При цьому використовується основний закон виміру густини у таких витратомірах - співвідношення між масою й власною частотою коливань сенсорної трубки. У робочому режимі задаюча котушка (рис. 2) працює на струмі від перетворювача, який збуджує механічні коливання сенсорних трубок на резонансній частоті, яка залежить від їхньої геометрії, матеріалу, конструкції й маси.
Маса трубок складається із двох частин: маси самих трубок і маси вимірюваного середовища в трубках. Для конкретного типорозміру сенсора маса трубок постійна. Так як маса вимірюваного середовища в трубках дорівнює добутку густини середовища на його внутрішній об’єм, який є також постійним для конкретного типорозміру ПВП, то частота резонансних коливань трубок однозначно зв’язана з густиною середовища. Як тільки маса вимірюваного середовища збільшується із-за збільшення його густини, відповідно зменшується власна частота коливань трубок. І навпаки - при зменшенні маси вимірюваного середовища, власна частота коливань трубок збільшується. Таким чином, густина середовища в таких витратомірах визначається шляхом вимірювання частоти власних резонансних коливань сенсорів.
Для забезпечення режимів вимірювання по витратам та густині, амплітуда коливань трубок автоматично регулюється задаючою котушкою через схему автоматичного регулювання підсилення задаючого генератора, що забезпечує стабільність вихідного сигналу обох сенсорів в діапазоні від 80 до 110 мВ.
Для компенсації впливу зміни темперетури продукту (формула 2) на похибку витратоміра, у ПВП MASS 2100/M вимірюється також температура середовища, яке походить крізь сенсор. Для цього в ПВП додатково установлений термометр опору PT100, який за четирьохпровідною схемою з’єднується з незрівноваженою мостовою схемою. Пропорційний витратам сигнал від обох сенсорів, виміряне значення температури та частота збудження власних механічних коливань сенсорних трубок подаються у мікропроцесорний преретворювач сигналов MASS 6000. де перетворюються в пропорційні витратам сигнали, які використовуються для обчислення масової та об’ємної витрати, фракційних витрати, температури та густини продукту.