

7.4.9. Авиационные (самолетные) рлс
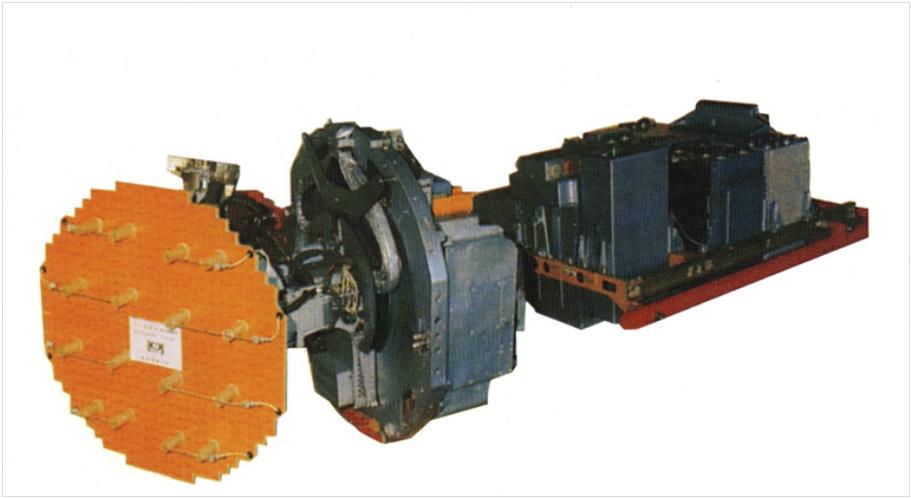
Радиолокационная станция «Жук» (Россия) – многофункциональный, многорежимный, всепогодный трехсантиметровый радиолокатор для самолетов МИГ-29, МИГ-25, Су-27 и их модификаций с антенной типа ФАР и цифровой обработкой сигналов.
В режиме «воздух–воздух» обеспечивает: сопровождение 10 целей, одновременное наведение управляемого оружия на 2-А цели, различные режимы воздушного боя, автоматическое огибание рельефа местности при полете на малых высотах.
В режиме «воздух-земля» обеспечивает: картографирование земной поверхности реальным лучом диаграммы направленности, доплеровское обужение этого луча, синтезирование апертуры и ее искусственную остановку, обнаружение и сопровождение движущихся наземных целей, определение высоты и скорости полета самолета.
Дальность обнаружения целей в передней полусфере – 80 км, зона обзора по азимуту – ±20°, +60°, ±90°. Импульсная мощность РЛС – 5 кВт, средняя мощность – 1 кВт. Среднее время наработки на отказ – 120 ч, масса – 250 кг, объем – 800 дм3. Внешний вид РЛС показан на рис. 11 цветной вклейки.
Авиационный комплекс радиолокационного дозора и наведения А-50Э (Россия) включает самолет А-50Э (модификация Ил-76МД) и радиотехнический комплекс (РТК). Предназначен для обнаружения и определения государственной принадлежности (по принципу «свой-чужой») воздушных и морских целей, выдачи информации о них на командные пункты АСУ, наведения истребителей на воздушные цели и самолетов фронтовой авиации на наземные и морские цели. Основой РТК является трехкоординатная импульсно-доплеровская РЛС с цифровой системой СДЦ и внефюзеляжной антенной системой («гриб»).
Дальность обнаружения воздушных целей: бомбардировщиков типа В-52 в режиме «выше горизонта» – 650 км, низколетящих истребителей типа МиГ-29 – до радиогоризонта, крылатых ракет (с эффективной площадью 1м2) в режиме квазинепрерывного излучения – 215 км. Дальность обнаружения надводных кораблей (с эффективной площадью более 250 м") – до радиогоризонта. Ошибки измерения координат сопровождаемых воздушных целей: плоскостных – до 2 км (относительно самолета А-50Э на дальности до 300 км); высоты – до 2,5 км (для дальности от 100 км до 200 км). Ошибка пеленгации постановщиков активных помех, работающих на частотах РЛС, – не более 0,75°.
Число одновременно сопровождаемых воздушных целей – до 300, средний коэффициент проводки сопровождения воздушных целей равен 0,74. Число наводимых на воздушные цели истребителей – до 30.
Дальность обмена телекодовой информацией с командным пунктом через специальный наземный приемопередающий центр – до 350 км по ММ-ДМВ радиолинии, до 2000 км по спутниковой радиолинии, до 2000 км по KB радиолинии. Дальность симплексной связи между самолетом А-50Э и взаимодействующими истребителями по МВ-ДМВ радиолинии – до 450 км. Продолжительность патрулирования на удалении 1000 км от аэродрома взлета при взлетной массе 190 тонн – до 4 ч. Экипаж: летный – 4 чел., РТК – 11 чел. Внешний вид авиационного комплекса дозора и наведения показан на рис. 12 цветной вклейки.
Рис. 1. Внешний вид антенного поста ТРЛК-11

|
Рис. 2. Радиолокационная станция РЛС 55Ж6-3 |

Рис. 3. Радиолокационная станция «Противник-ГЕ»


Рис. 4. Радиолокационная станция 64ЛЕ («Гамма-С1Е»)

Рис.5. Радиолокационная станция 39Н6Е («Каста-2Е2»)


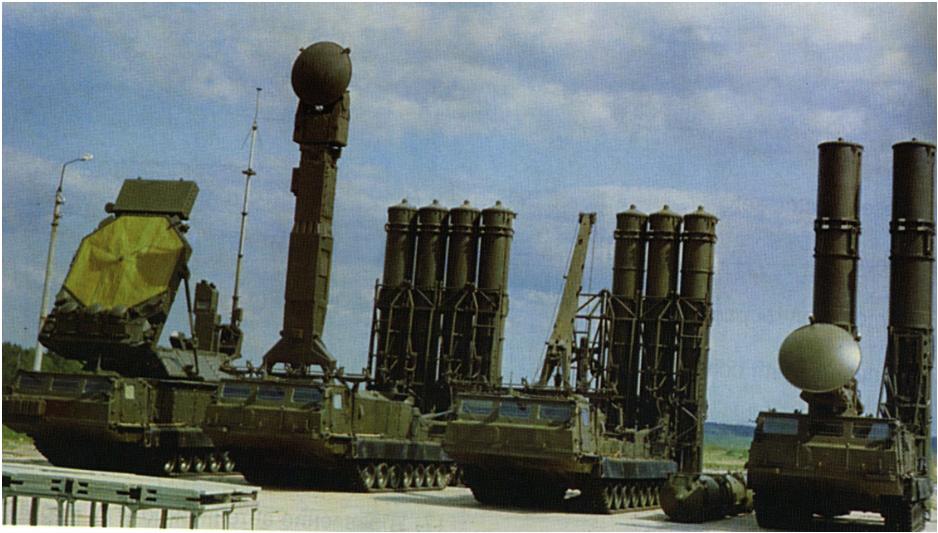
Рис.6. Многофункциональный локатор подсвета и наведения ЗРК С-300 ПМУ-1

|
Рис. 7. Зенитная ракетная система С-300В |

|
Рис. 8. Наземная радиолокационная станция «Кредо-ТЕ» |



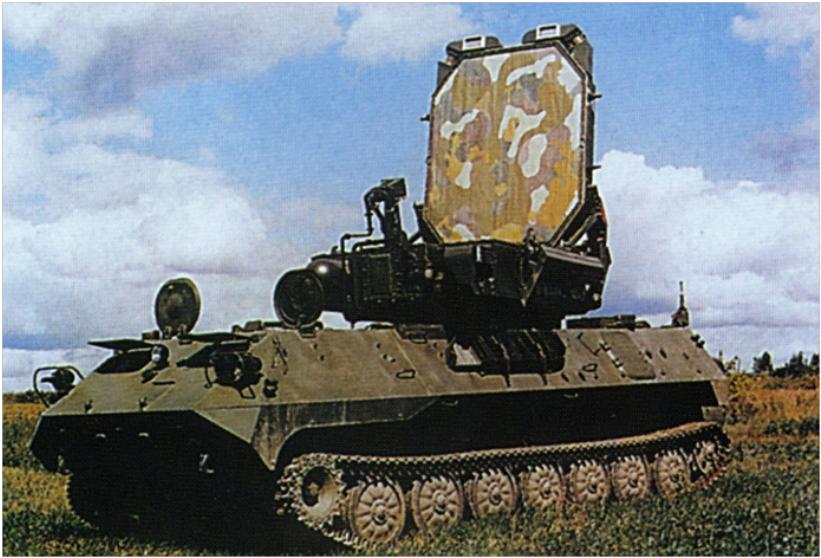
 Рис.
9. Автоматизированный мобильный
радиолокационный комплекс «Зоопарк-1»
Рис.
9. Автоматизированный мобильный
радиолокационный комплекс «Зоопарк-1»
|
|
|
Рис. 11. Бортовая радиолокационная станция «Жук» |




262

|
Рис.12. Авиационный комплекс дозора и наведения А-509 |


