

7.3.2. История радиолокации
В основе радиолокации лежит явление отражения радиоволн, которое наблюдал еще Г. Герц. Первый радиолокатор (под названием телемобилоскоп) был описан в патентной заявке немецким инженером X. Хилсмейером в 1904 г. Практически радиолокационные станции (РЛС) стали производиться в 30-х годах XIX века.
РЛС получили широкое распространение для обнаружения самолетов противника в годы Второй мировой войны. Англичане не без основания считают, что именно РЛС спасли их остров от воздушного вторжения немецко-фашистских захватчиков в 1939-1945 гг.
В нашей стране первые РЛС были применены для прикрытия Ленинграда во время войны с белофинами в 1939-1940 гг. В этих РЛС, разработанных под руководством инженеров М. И. Куликова и Д. С. Стогова, использовалось непрерывное излучение радиоволн. Подобные системы радиолокации исследовались уже с 1932 г. по инициативе инженера П. К. Ощепкова, а первые макеты РЛС с непрерывным излучением были разработаны и испытаны в 1934-1936 гг. под руководством инженера Б. К. Шембеля. Впоследствии наибольшее распространение получили импульсные РЛС, которые в нашей стране были разработаны впервые в 1937 г. под руководством инженера (впоследствии академика) Ю. Б. Кобзарева.
В авиации радиолокационные системы служат для решения навигационных задач и для управления воздушным движением. Чтобы при необходимости можно было определить принадлежность обнаруженного самолета, его снабжают специальным радиолокационным ответчиком, который при приеме радиолокационных импульсов посылает свой закодированный радиоответ.
Бортовые самолетные РЛС используются также для определения истинной (путевой) скорости полета, выявления грозовых фронтов и для получения на экране электроннолучевой трубки радиолокационного изображения земной поверхности при отсутствии ее видимости. Радиолокационные высотомеры, устанавливаемые на самолете, позволяют с большой точностью определить истинную высоту полета. В условиях арктических полетов специальные бортовые РЛС позволяют определять толщину льда, что необходимо для установления возможности посадки самолета на лед.
Объектами радиолокационного обнаружения могут служить и космические объекты: спутники Земли и межпланетные корабли, различные астрономические тела и, в частности, планеты. Радиолокация планет позволила существенно уточнить их параметры (например, расстояние от Земли и скорость вращения), состояние атмосферы и т. д. Такие исследования проводились в нашей стране под руководством академика В. А. Котельникова. В начале 60-х годов была произведена, в частности, радиолокация Венеры, Меркурия, Марса и Юпитера.
7.3.3. Принципы построения радиолокационных систем
Активная радиолокация с пассивным ответом основана на использовании эффекта вторичного излучения (отражения) радиоволн (рис. 7.1).
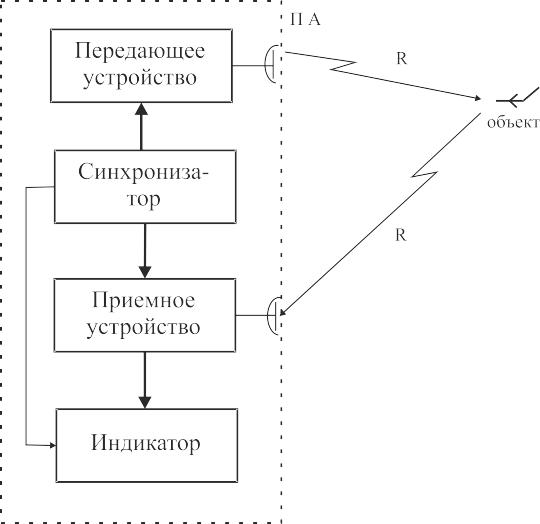
Рис. 7.1. Структура активной радиолокации с пассивным ответом
Передающее
устройство вырабатывает мощный
радиоимпульс длительностью
 (рис. 7.2), возбуждающий передающую антенну
ПА.
(рис. 7.2), возбуждающий передающую антенну
ПА.
|
Рис. 7.2. Диаграммы напряжений в радиолокационной станции |
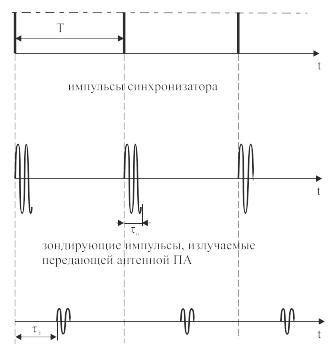
В результате излучается электромагнитная волна. Через некоторое время она достигает объект, находящийся на расстоянии R от антенны. В теле объекта наводятся электрические токи, возбуждающие вторичное электромагнитное поле (отраженный сигнал, эхо-сигнал), которое достигает приемную антенну ПрА.
Эхо-сигнал
усиливается приемным устройством и
подается на электронно-лучевую трубку.
На экране трубки высвечивается линия
горизонтальной развертки, начало которой
совпадает с моментом выработки импульса
синхронизатора. Кроме того, на экране
трубки имеется изображение импульса
эхо-сигнала (рис. 7.3), которое задержано
на время
 ,
равное времени проходящей электромагнитной
волной расстояния 2R,
т.е. расстояние от передающей антенны
ПА до объекта, а затем от объекта – до
приемной антенны ПА2. Таким образом, за
время
электромагнитная волна проходит
расстояние 2R
со скоростью с=107м/с.
,
равное времени проходящей электромагнитной
волной расстояния 2R,
т.е. расстояние от передающей антенны
ПА до объекта, а затем от объекта – до
приемной антенны ПА2. Таким образом, за
время
электромагнитная волна проходит
расстояние 2R
со скоростью с=107м/с.
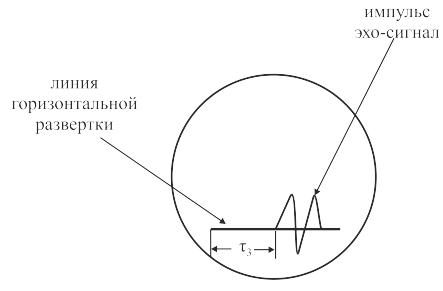
Рис. 7.3. Вид экрана электронно-лучевой трубки с изображением эхо-сигнала
Поэтому, измерив отрезок времени , получим расстояние до цели:
 . (7.3.1)
. (7.3.1)
Активная радиолокация с активным ответом. Такой вид радиолокации позволяет надежно получать информацию о «своих» объектах (самолетах, кораблях). Их облучают запросными зондирующими импульсами. На самих объектах находятся ответчики, представляющие собой приемопередатчики, переизлучающие принятые сигналы лишь в том случае, если это «свой» объект.
Несущие частоты и коды (законы модуляции) запросных и ответных сигналов могут изменяться в широких пределах. Это обеспечивает опознавание государственной принадлежности объектов («свой-чужой») и индивидуальное опознавание.
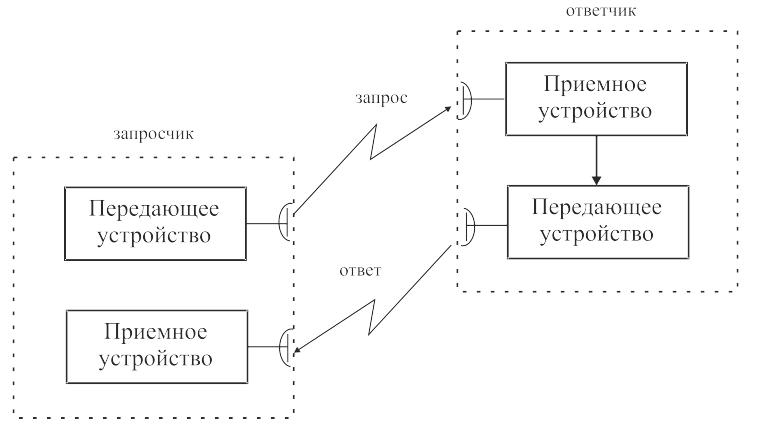
Рис. 7.4. Структура активной радиолокации с активным ответом
Активный ответ также широко применяется для радионавигации самолетов, морских судов и т.п.
Пассивная радиолокация использует собственные излучения элементов цели. Излучения создают нагретые участки поверхности, радиолокационные и радионавигационные средства, средства радиосвязи и т.п. устройства (рис. 7.5).
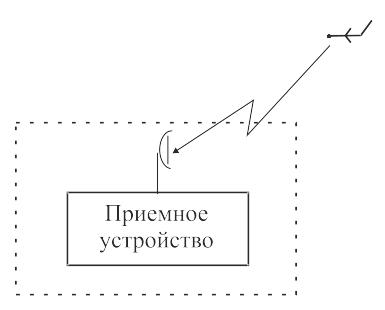
Рис. 7.5. Пассивная радиолокация