

6.6.2. Скалярное произведение и расстояние для двумерных векторов
Сделав выборку некоторого сигнала f(t), возьмем из нее два значения f1 и f2. Таким же образом получим два значения для некоторого сигнала g(t) (рис. 6.17).
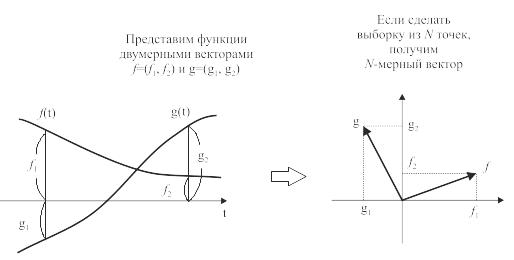
Рис. 6.17. Векторное выражение функции
Что же нужно сделать для того, чтобы узнать степень взаимоотношения между двумя сигналами f(t) и g(t), исходя из их значений? Если сделать выборку, состоящую всего лишь из двух значений, то, естественно, степень приближения к первоначальному сигналу невысока. Как показано выше, эта проблема разрешится, если увеличить число элементов выборки. Но пока рассмотрим случай выборки из двух точек.
Итак, определим векторы, содержащие по два элемента из выборки каждого сигнала, иначе говоря, двумерные векторы.
Обозначим их как f и g:
f = (f1, f2), g = (g1, g2).
Если сигналы выразить через векторы таким образом, то исследование отношений между ними есть исследование отношений между векторами. В чем же заключается такое исследование?
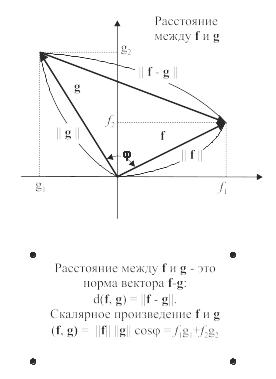
Рис. 6.18. Расстояние и скалярное произведение двумерных векторов
Во-первых, нужно выяснить, насколько удалены векторы f и g, т. е. измерить расстояние между векторами (рис. 6.18). Пусть d(f, g) – расстояние между векторами f u g. Чем меньше значение d, тем ближе векторы f и g, а значит, и сильнее между ними взаимосвязь.
Величину
вектора f
(абсолютное
значение) обозначим как
 .
Используя
компоненты вектора f,
получим:
.
Используя
компоненты вектора f,
получим:
 . (6.6.1)
. (6.6.1)
называют также нормой вектора f.
Итак, очевидно (см. рис 6.18), что расстояние между векторами f и g есть норма вектора f – g. Это можно записать, используя компоненты векторов, в следующем виде:
 . (6.6.2)
. (6.6.2)
Расстояние – это один из параметров, измеряющий силу связи между векторами. Однако посмотрите на рис. 6.19. На этом рисунке векторы g и h одинаково удалены от вектора f. Но векторы g и f имеют одно направление, а вектор h расположен под углом к вектору f. Поэтому, увеличив вектор f в несколько раз, можно получить вектор g и невозможно получить вектор h. Несмотря на равноудаленность g и h от вектора f, связь f и g гораздо сильнее. Видимо, было бы недостаточно выражать связь между векторами одним лишь расстоянием. Необходимо также учитывать угол между ними (рис. 6.19).
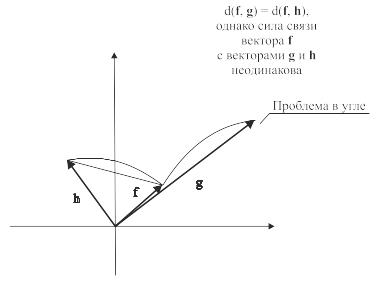
Рис. 6.19. Связь между векторами
Для выражения связи между векторами используют скалярное произведение. Скалярное произведение между f и g обозначается как (f, g) и определяется следующим образом:
 . (6.6.3)
. (6.6.3)
Следовательно,
 .
.
Обозначим эту величину
 , (6.6.4)
, (6.6.4)
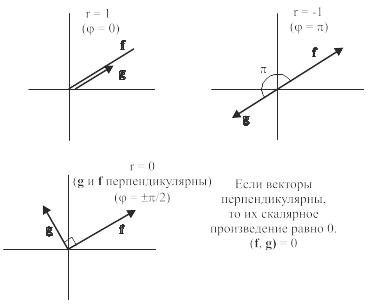
Рис. 6.20. Коэффициент корреляции
Величина
выражает
силу связи между векторами f
и g
через
угол между ними (рис.
6.20).
Если направления f
и
g
совпадают
(т. е.
= 0), то
принимает
максимальное значение, равное 1. С
увеличением угла
значение
уменьшается.
Если
=
0,
т. е.
 =
0, векторы
f
и g
взаимно
перпендикулярны. Назовем величину
коэффициентом корреляции. Как
видно из соотношения (6.6.4),
зависит от угла
между
векторами и не зависит от нормы векторов.
=
0, векторы
f
и g
взаимно
перпендикулярны. Назовем величину
коэффициентом корреляции. Как
видно из соотношения (6.6.4),
зависит от угла
между
векторами и не зависит от нормы векторов.
Как выразить скалярное произведение, используя компоненты вектора? Это можно сделать следующим образом.
Чтобы вывести эту формулу, применим теорему косинусов для векторов (см. рис. 6.18):

Следовательно,
 Скалярное
произведение вектора f
на
самого себя равно:
Скалярное
произведение вектора f
на
самого себя равно:
 (6.6.6)
(6.6.6)
и выражает связь между скалярным произведением и нормой.
Подставим полученные результаты в выражение коэффициента корреляции (6.6.4) и представим следующим образом:
 . (6.6.7)
. (6.6.7)