

Контрольные каналы могут быть выполнены в виде структурных модулей, представленных на рис. 2.132.
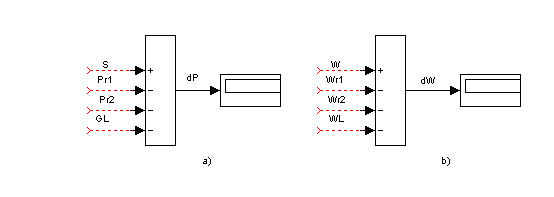
Рис. 2.132
Приняв выходные величины интеграторов в структуре рис. 2.131 за переменные состояния модели (Х1 = i, Х2 = WR1, Х3 = WR2, Х4 = WL, Х5 = W), запишем уравнения состояния и уравнения выходов RL-цепи в виде выражений:
dX1/dt = (e/R Х1)R/L; dX2/dt = Х1R1Х1; dX3/dt = Х1R2Х1;
dX4/dt = [(e/R Х1)R/L]LХ1; dX5/dt = eХ1;
uR1 = R1Х1; uR2 = R2Х1; uL = [(e/R Х1)R/L]L; (2.31)
PR1 = uR1Х1; PR2 = uR2Х1; GL = uLХ1; S = eХ1; i = Х1;
iв = e/R, ic = e/R Х1.
Для формирования модели цепи по второму способу выполним операцию суммирования напряжений на элементах последовательной RL-цепи, в результате чего имеем уравнение соединения
e = uR1 + uR2 + uL. (2.32)
Уравнения элементов контура
uR1 = R1i; uR2 = R2i, uL = Ldi/dt. (2.33)
Если учесть, что d/dt = p тогда
e = uR1
+ uR2
+ uL,
= uR1
+ uR2
+ uL,
uR1 = R1i; uR2 = R2i, uL = Lpi. (2.34)
Представим (2.34) в виде:
i = uL (1/L)(1/p); uL = e uR1) uR2; (2.35)
uR1 = R1i, uR2 = R2i.
Уравнениям (2.35) соответствует ДСС двухэлементной RL-цепи, изображенная на рис. 2.133 и отличающаяся от схем рис. 2.129 тем, что в ее узле суммируются напряжения.
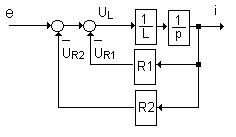
Рис. 2.133
Полная развернутая структура модели RL-цепи с учетом (2.31) показана на рис. 2.134.
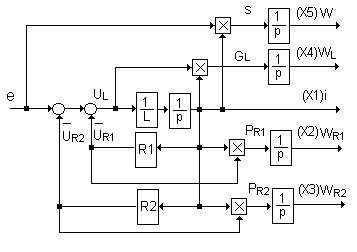
Рис. 2.134
Отметим, что модели рис. 2.131. и 2.134 позволяют проводить анализ динамических процессов в цепях с нулевыми и ненулевыми начальными условиями при воздействиях произвольных источников напряжения. Задание ненулевых начальных условий в известных пакетах (VISIM, SIMULINK и т.п.) обычно производится при редактировании параметров (коэффициент усиления, постоянная времени, начальное значение выходной переменной и т.д.) конкретного блока исследуемой системы. Это может быть выполнено также путем включения на выходы интеграторов дополнительных блоков, суммирующих начальные значения переменных (в данном случае токов) с выходными сигналами интеграторов.
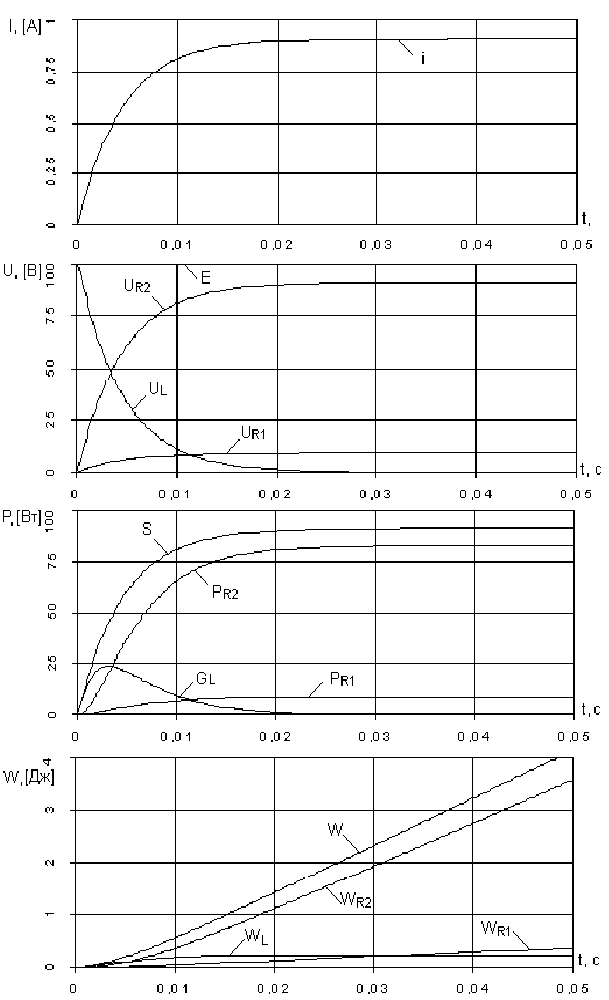
Рис. 2.135
В качестве примера на рис. 2.135 приведены зависимости напряжений, мощностей и энергий на элементах R1=10 Ом, R2=100 Ом, L=0,5 Гн от времени при включении цепи на постоянную ЭДС Е=100 В. Там же показаны мощность и энергия источника питания.
П оследовательная
трехэлементная RLC
– цепь. Для
последовательного контура (рис.2.136) с
реактивными элементами L и C и активным
оследовательная
трехэлементная RLC
– цепь. Для
последовательного контура (рис.2.136) с
реактивными элементами L и C и активным
Рис. 2.136
сопротивлением R, характеризующим потери в контуре, сформируем интегро-дифференциальное уравнение
e = Ri + Ldi/dt +1/Сidt, (2.36)
где e = e(t) – напряжение на зажимах цепи. Выражение (2.36) запишем в виде:
e = uR + uL + uC, (2.37)
где uR = Ri, uL = Ldi/dt, uC = 1/Сidt.
Если обозначить dt = 1/p и учесть, что d/dt = p, тогда для переменных uC и uL получим
uC = (1/С) (1/p)i, uL = Lpi. (2.38)
Из выражения uL = Lpi, имеем
i = uL /Lp. (2.39)
Используя выражение (2.39) и учитывая, что uL = e - uR - uC, а uR = Ri и uC = (1/Сp)i формируется детализированная структурная схема RLC –цепи (рис. 2.137).
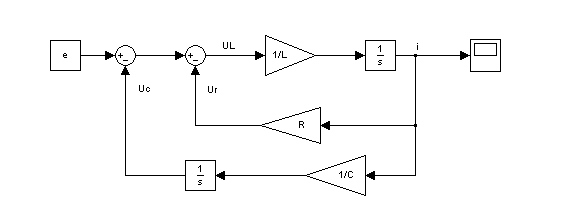
Рис.2.137
На рис. 2.138 изображена полная развернутая структура модели рассматриваемой цепи с учетом каналов измерения мгновенных значений напряжения, мощности и энергии элементов контура.

Рис. 2.138
В качестве примера на рис. 2.139 приведены зависимости напряжений, мощностей и энергий на элементах цепи R=25 Ом, L=0,2 Гн, C=50 мкФ от времени при включении ее на синусоидальную ЭДС е =100 sin (314t).
Р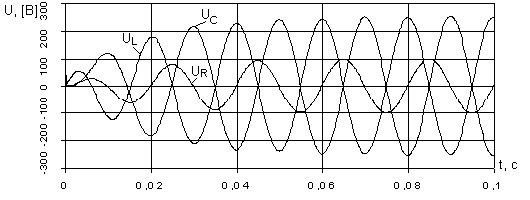
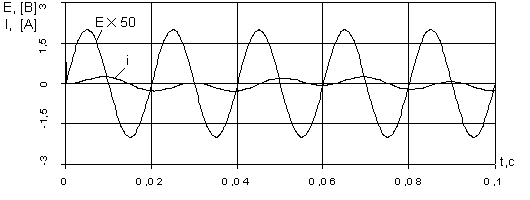

 ис.
2.139
ис.
2.139
На рис. 2.140 блоки измерения мощности и энергии представлены в виде подсистем (S-моделей).
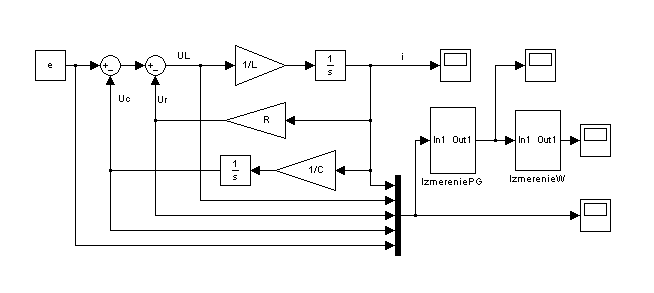
Рис.2.140