

10.1 Статическая настройка.
Цель статической настройки – установить точность поддержания заданного значения регулируемой величины в установившемся режиме. В объем статической настройки входят следующие операции:
- балансировка измерительного блока регулятора, которая выполняется совместно с настройкой датчиков таким образом, чтобы выходной сигнал схемы после ИБ был равен нулю при заданном значении измеряемого параметра;
- фазировка сигналов, при этом включение регулятора в строну «меньше» должно приводить к прикрытию регулировочного органа и наоборот, включение в сторону «больше» к их открытию;
- обеспеченье статической точности регулирования, задаваясь значением допустимого изменения регулируемой величины. Обычно принимают, что зона нечувствительности регулятора в единицах регулируемого параметра, должна составлять половину допускаемого отклонения этого параметра;
- настройка статического соотношения параметров, которая должна обеспечивать правильное соотношение регулируемых параметров регулирования на входе в КУУ в любой точке регулируемого диапазона АСР;
- отстройка от пульсаций сигналов, выполняеемая для стабильной работы регулятора. Значение измеряемых параметров в АСР, например, расхода и давления жидкостей, газов и уровней в сосудах обычно пульсирует. Это приводит к тому, что в сигналах датчиков таких параметров содержатся случайные колебания – пульсации сигналов. На практике принято считать работу регулятора стабильной, если при отсутствии возмущающих воздействий на объект регулирования регулятор включается под действием самопроизвольных изменений регулируемой величины не более 3 – 4 раз в минуту;
- определение диапазона действия задатчика. Его выбирают по технологически возможному и допустимому диапазону изменения выходной регулируемой величины.
10.2 Динамическая настройка.
Целями динамической настройки является, во первых, обеспеченье устойчивости работы АСР, во вторых, получение приемлемого качества переходных процессов.
Обычно настройка рассчитывается для одного из каналов воздействий, по которому регулирование является наиболее чувствительным и может обеспечить компенсацию возмущений, поступающих на объект регулирования по другим каналам. Параметры динамической настройки могут быть получены различными методами, которые условно можно разделить на две группы: экспериментальные и расчетные методы.
Основное преимущество экспериментальных методов в том, что параметры настройки регуляторов определяются непосредственно на действующем оборудовании.
Расчетные методы в некоторых случаях позволяет уменьшить время, затрачиваемое на настройку системы. Расчет настроек предусматривает определение численных значений параметров настройки регуляторов, обеспечивающих достижение требуемого качества регулирования: минимальные динамические и статические погрешности в процессе регулирования, минимальное время регулирования или же минимум линейного (квадратичного) интегрального показателя переходного процесса в замкнутой АСР.
Настройка, обеспечивающая достижение требуемого качества регулирования и удовлетворяющая принятым ограничениям по перемещению регулировочного органа, считается оптимальной.
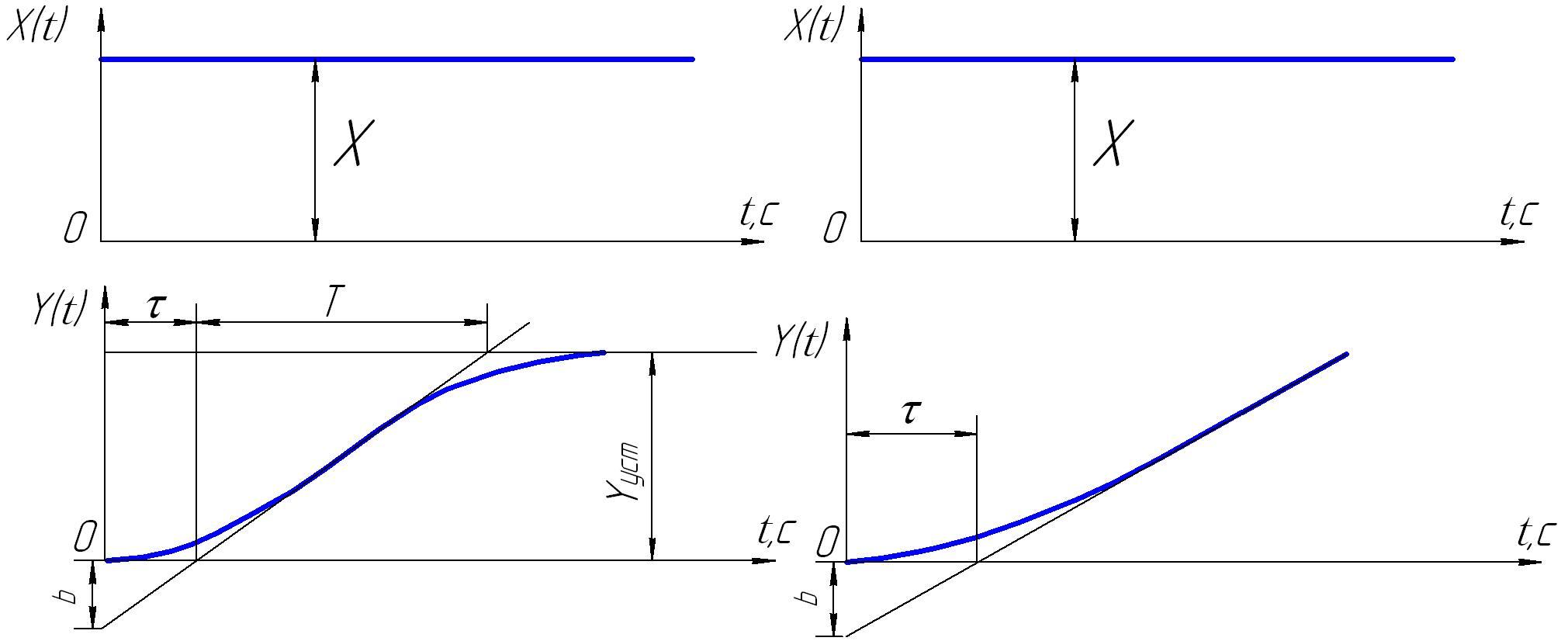
Исходными данными для расчета настроек служат динамические, в частности, разгонные характеристики объектов регулирования, получаемые при регулирующем воздействием на объект регулирования со стороны регулировочного органа.
При графической обработке переходных (разгонных) характеристик определяются следующие динамические параметры объекта: коэффициент усиления К, постоянную времени Т, время запаздывания , отношение/Т, коэффициент пропорциональности интегрирующего звена Ки=К/Т для объекта без самовыравнивания.
Для определения настроек регулятора
по найденным величинам рекомендуется
расчетные формулы (Табл. 10.1) для настроек
параметров регулятора при реализации
тех или иных законов регулирования: Кр
и , Ти и Тд. Приведенные
в таблице 10.1 настройки рассчитаны на
степень затухания=0,75
и минимум квадратичного интегрального
критерия![]() для процессов регулирования в линейных
АСР.
для процессов регулирования в линейных
АСР.
Формулы для расчета настроек являются приближенными, и требуется экспериментальная проверка полученных значений настроек на моделях или в условиях промышленной эксплуатации АСР.
Существуют также полуэкспериментальные методы, в которых количество расчетов настройки сведено к минимальному. Это метод «раскачки» разомкнутой АСР и метод выведения замкнутой АСР на границу устойчивости. Расчетные формулы для настроек регуляторов приведены в таблицах 10.2 и 10.3 соответственно.
![]()
![]()
![]()
Рис. 10.1 Обработка кривых для определения параметров модели.
Таблица 10.1
|
Объект |
1)
2)
|
| |||||||
|
|
|
| |||||||
|
Настройка |
Регулятор | ||||||||
|
П |
ПИ |
ПИД |
П |
ПИ |
ПИД |
П |
ПИ |
ПИД | |
|
|
1) 2) |
1) 2) |
1) 2) |
|
|
|
|
| |
|
|
- |
|
|
- |
|
|
- |
|
|
|
|
- |
- |
|
- |
|
- |
| ||
|
|
|
|
|
|
|
| |||


Таблица 10.2
Расчетные формулы настройки регуляторов при раскачке АСР
![]()
|
Автор |
ОР с самовыравниванием |
ОР без самовыравнивания | ||
|
|
ПИ-регулятор |
П-регулятор |
П-регулятор | |
|
|
Кр |
Ти |
Кр |
Кр |
|
Ротач В.Я. |
- |
- |
- |
|
|
Рубашкин А.С. |
|
|
|
- |
![]() -
устанавливаемый на время опыта коэффициент
П-регулятора
-
устанавливаемый на время опыта коэффициент
П-регулятора

Таблица 10.3
Расчетные формулы настройки регуляторов при выведения АСР на границу устойчивости

|
Автор |
ОР с самовыравниванием |
ОР без самовыравнивания | ||
|
|
ПИ-регулятор |
П-регулятор |
П-регулятор | |
|
|
Кр |
Ти |
Кр |
Кр |
|
Ротач В.Я. |
- |
- |
- |
|
|
Рубашкин А.С. |
|
|
|
- |
Кр – коэффициент усиления регулятора, при котором получены критические колебания.
![]() - перемещение регулировочного органа,
%.
- перемещение регулировочного органа,
%.