

2.2.2. Силовой расчет структурной группы звеньев 2-3
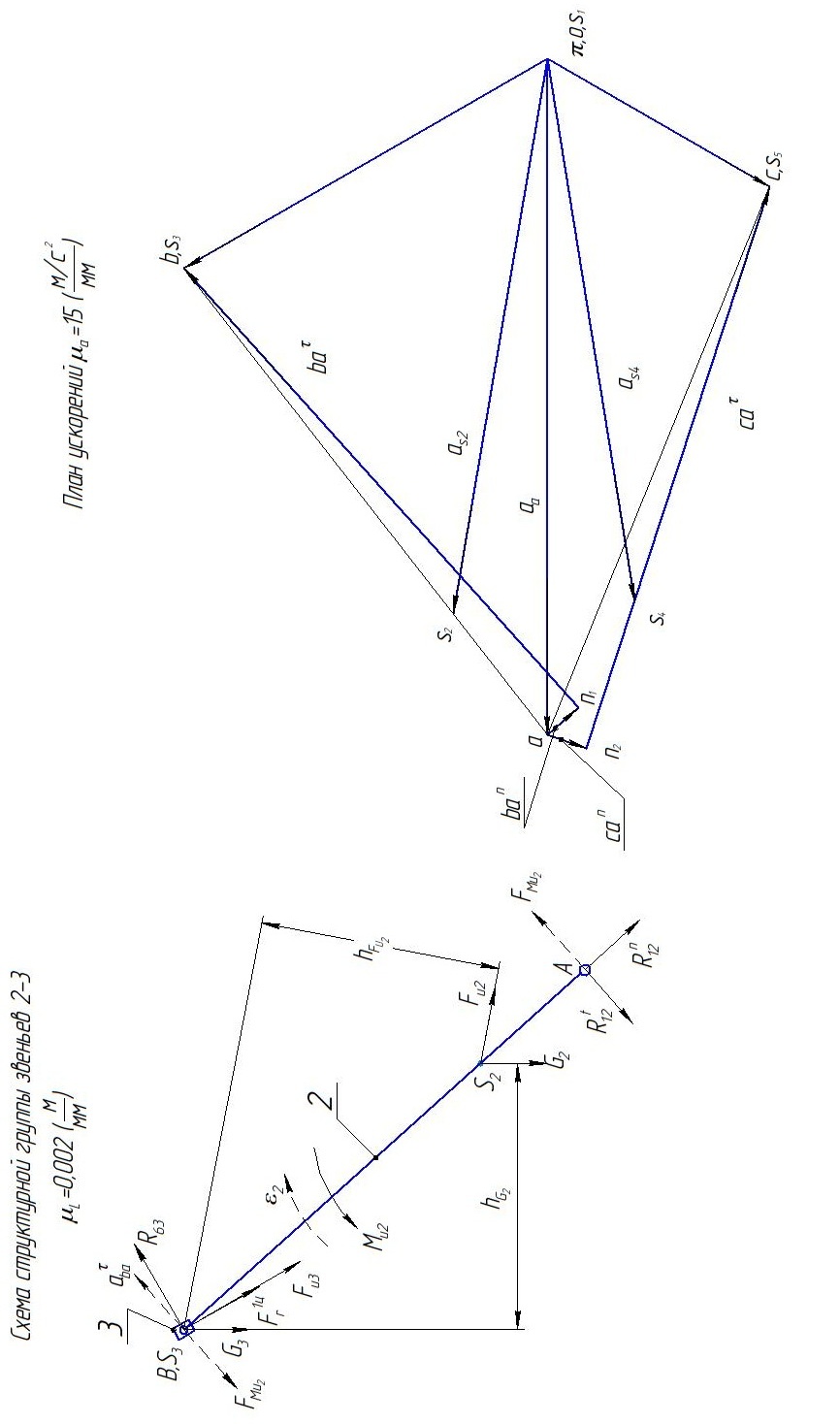
Строим в масштабе схему структурной группы звеньев 2-3 (рис. 6.32). Прилагаем к звеньям схемы все внешние и внутренние нагрузки. Рассматриваем цилиндр 1 двигателя, в котором идет такт рабочего хода.
Давление
газов в цилиндре определяется длиной
ординаты


на индикаторной диаграмме двигателя внутреннего сгорания (рис. П.7).
 .
.
Сила давления газов на ползун 3 в цилиндре 1


Здесь s – площадь днища поршня, которая найдена была ранее при силовом расчете структурной группы звеньев 4-5. Эта сила является силой движущей, приложена к ползуну 3 (см. рис. 6.32) и направлена вниз вдоль направляющей ВО движения ползуна 3 относительно стойки (см. рис. П.7).


а) б)
Рис. 6.32. Схема структурной группы звеньев 2-3 (а) и план ускорений (б)
для механизма первого цилиндра двигателя
Вычисляем силы тяжести звеньев 2 и 3:
 (Н),
(Н),
 (H).
(H).
Прилагаем силы тяжести в центрах тяжести звеньев вертикально вниз (см. рис. 6.32,а).
Силы инерции звеньев
 (H);
(H);
 (Н).
(Н).
Каждую силу инерции звена прилагаем в центре тяжести этого звена (см. рис. 6.32, а) и направляем вектор этой силы параллельно, но противоположно вектору ускорения центра тяжести, имеющемуся на плане ускорений (см. рис. 6.32, б).
Моменты
сил инерции звеньев
 и
и
 определяем через моменты инерции
определяем через моменты инерции
 ,
,
 и угловые ускорения звеньев
и угловые ускорения звеньев
 и
и
 .
.
Вычисляем величину углового ускорения шатуна 2:
 (с-2).
(с-2).
Для
определения направления
проводим на схеме структурной группы
звеньев 2-3 (см. рис. 6.32, а) пунктирной
линией из точки В вектор ускорения
 точки В относительно условно неподвижной
точки А.
точки В относительно условно неподвижной
точки А.
Угловое ускорение звена ВА направлено в ту же сторону, что и вектор , то есть по направлению движения часовой стрелки.
Момент инерции шатуна дан по заданию: = 0,075 ( ).
 (Нм).
(Нм).
Момент сил инерции шатуна 2 направляем противоположно направлению углового ускорения звена 2, то есть против направления движения часовой стрелки (см. рис. 6.32, а).
Для ползуна 3 имеем
 ,
так как
,
так как
 .
.
Определяем теперь внутренние силы, то есть силы реакций в кинематических парах структурной группы звеньев 2-3. Найдем силы реакций во вращательной кинематической паре А (см. рис. 6.32, а) соединения звеньев 1 и 2 и в поступательной паре соединения ползуна 3 со стойкой 6.
Реакцию
 во вращательной кинематической паре А
раскладываем на две составляющие:
тангенциальную
во вращательной кинематической паре А
раскладываем на две составляющие:
тангенциальную
 ,
которую проводим перпендикулярно линии
шатуна АВ, и нормальную
,
которую проводим перпендикулярно линии
шатуна АВ, и нормальную
 ,
которую проводим параллельно линии
шатуна АВ. Направления стрелок векторов
этих составляющих выбираем произвольно,
и в дальнейшем эти направления уточняются.
,
которую проводим параллельно линии
шатуна АВ. Направления стрелок векторов
этих составляющих выбираем произвольно,
и в дальнейшем эти направления уточняются.
Реакцию
 прилагаем к ползуну 3 в точке В
перпендикулярно боковой стенке ползуна.
Направление стрелки вектора этой реакции
также выбираем произвольно, и в дальнейшем
это направление уточняется.
прилагаем к ползуну 3 в точке В
перпендикулярно боковой стенке ползуна.
Направление стрелки вектора этой реакции
также выбираем произвольно, и в дальнейшем
это направление уточняется.
Определение реакций производим в принятой последовательности для рассматриваемого вида структурной группы звеньев.
1.
Сумму всех моментов сил, действующих
относительно центра вращательной
кинематической пары В на звено 2,
приравниваем нулю:
 .
Вычисляется тангенциальная составляющая
реакции
во вращательной паре А.
.
Вычисляется тангенциальная составляющая
реакции
во вращательной паре А.
 ;
;
 (
).
(
).
2. Векторная сумма всех сил, действующих на звенья 4 и 5, приравнивается нулю: .
 .
.
В
соответствии с уравнением в масштабе
сил строится план сил, на котором находят
нормальную составляющую реакции и
полную реакцию в крайней вращательной
кинематической паре А и реакцию в
поступательной паре:
 ,
,
 и
и
 .
План сил (рис. 6.33) строим в масштабе
.
.
План сил (рис. 6.33) строим в масштабе
.
Чтобы определить длину вектора силы, величину этой силы делим на этот масштаб. Например, силу давления газов на ползун 3 в цилиндре 1 откладываем на плане сил в виде отрезка длиной:

Векторы известных сил откладываем один за другим. Силы тяжести звеньев отсутствуют на плане сил, так как длина их векторов в выбранном масштабе сил получилась менее одного миллиметра.

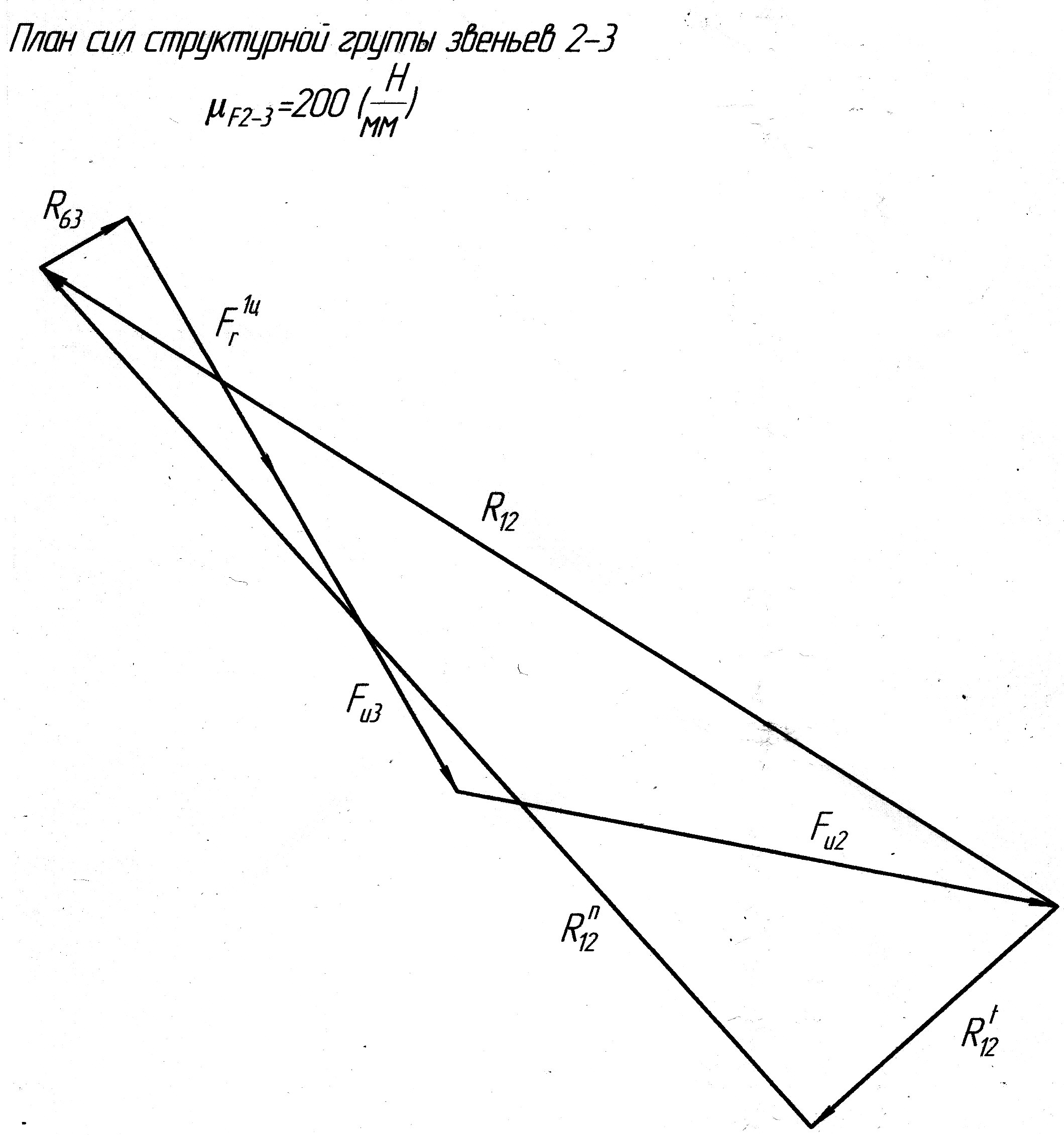
Рис. 6.33. План сил структурной группы звеньев 2-3
Из начальной точки построения см. рис 6.33) проводим прямую линию, параллельную линии вектора реакции , а из конечной точки построения проводим прямую линию, параллельную вектору .
Находим точку пересечения этих линий. Эта точка определяет величины неизвестных реакций. В соответствии с векторным уравнением сил изображаем стрелки векторов этих реакций. Проводим также линию вектора полной реакции , которая равна сумме ее нормальной и тангенциальной составляющих.
Находим на плане неизвестные реакции, умножая измеренные на плане длины соответствующих векторов на масштаб плана сил:
 (Н);
(Н);
 (Н);
(Н);