

1 Способ решения (по уравнению (1)):
Формально из (1) можно записать для последовательности I:
![]() ,
(2)
,
(2)
а для последовательности II:
![]() или
или
![]() ,
(3)
,
(3)
Р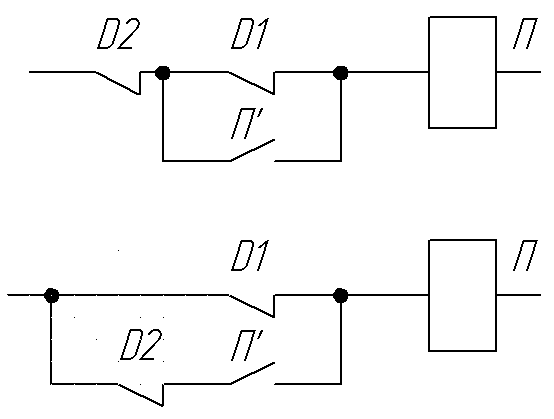 еализация
уравнений (2) и (3) на контактных элементах
имеет вид: (см. рис). Легко убедиться, что
обе схемы удовлетворяют последовательностям
тактов. Отличие здесь в обработке
ситуации, когда откажет датчик Д1. Пусть
он выдает 0, тогда при Д2=1 верхняя схема
(2) отключит питатель, а затем при Д2=0
снова его включит, т.е. будем иметь частое
включение П. Нижняя схема (3) при Д2=1, а
Д1=0 приведет к переполнению резервуара,
что является аварийной ситуацией.
Поэтому в схеме (3) ситуацию
еализация
уравнений (2) и (3) на контактных элементах
имеет вид: (см. рис). Легко убедиться, что
обе схемы удовлетворяют последовательностям
тактов. Отличие здесь в обработке
ситуации, когда откажет датчик Д1. Пусть
он выдает 0, тогда при Д2=1 верхняя схема
(2) отключит питатель, а затем при Д2=0
снова его включит, т.е. будем иметь частое
включение П. Нижняя схема (3) при Д2=1, а
Д1=0 приведет к переполнению резервуара,
что является аварийной ситуацией.
Поэтому в схеме (3) ситуацию
![]() можно считать аварийной и вводить
соответствующую защиту.
можно считать аварийной и вводить
соответствующую защиту.
2 Способ – с помощью карт Карно
Шаги применения способа:
Содержательное описание в виде перечня отличающихся друг от друга тактов – уже сделано.
Составление таблицы переходов.
В данном примере имеем 2 входа Д1 и Д2 и два возможных состояния выхода 1 – питатель включен, 2 – питатель выключен. Таблица переходов будет иметь следующий вид:
Исходное состояние |
Такты |
|||
1 |
2 |
3 |
4 |
|
Питатель включен (1) |
1 |
1 |
2 |
Х |
Питатель выключен (2) |
1 |
2 |
2 |
Х |
Д1 |
|
|
|
|
Д2 |
|
|
|
|
Х – ситуация, невозможная при исправном Д1.
Выбор числа вспомогательных функций и привязка их к соответствующим состояниям. Число вспомогательных переменных (функций) γ при числе состояний S определяется как
 .
Здесь же осуществляется привязка
вспомогательной функции к состояниям,
например с помощью таблицы соответствия.
.
Здесь же осуществляется привязка
вспомогательной функции к состояниям,
например с помощью таблицы соответствия.
В данном примере S=2, γ=1. Таблица соответствий состояний и вспомогательной переменной xв, которую можно считать равной выходному сигналу П, имеет вид:
N состояния |
Значение вспом. пер. xв=П |
1 |
1 |
2 |
0 |
Построение карт Карно для входных переменных и вспомогательных переменных и синтез алгебраических выражений.
Число столбцов в карте Карно такое же, как и в таблице переходов, а число строк равно числу комбинаций вспомогательных переменных (2). Клетки карты заполняются значениями вспомогательной функции, полученными путем замены номера состояния из таблицы переходов на значение вспомогательной функции из таблицы соответствия. Если число строк превышает число состояний (2>S), то свободные строки заполняются из соображений лучшей минимизации.
Для рассмотренного примера, карта Карно выглядит так:
|
|
D1 |
D2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
xв |
|
1 |
1 |
0 |
*01/12 |
|
|
1 |
0 |
0 |
*01/12 |
![]() - совпадает с (2).
- совпадает с (2).
Если принять, что при Д2=1, Д1=0 питатель включается – аварийный режим, то получим:
![]() - совпадает с (3).
- совпадает с (3).
Наконец, на пятом шаге производится реализация на выбранной элементной базе.
Пример 2:
Рассмотрим синтез последовательностного алгоритма для выше рассмотренного примера с подъемником. Первые два пункта уже были выполнены – содержательное описание с разбивкой на такты и таблица переходов.
Таблица переходов:
Исходное состояние |
Такты (наборы) |
||||||||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
||
Движ. вверх (1) |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
Движение вниз (2) |
3 |
3 |
3 |
3 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
3 |
3 |
3 |
3 |
|
Кабина стоит (3) |
3 |
3 |
3 |
3 |
3 |
3 |
2 |
3 |
3 |
2 |
3 |
1 |
1 |
3 |
3 |
3 |
|
Мнемо-схема |
ПН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Третий шаг – выбор вспомогательных переменных и привязка их к состояниям.
Здесь S=3, тогда будет равно 2 (хв1 и хв2). Таблица соответствия (примем хв1 В и хв2Н):
Состояние |
хв1 |
хв2 |
1 |
1 |
0 |
2 |
0 |
1 |
3 |
0 |
0 |
- |
1 |
1 |
Четвертый шаг – составление карты Карно и минимизация. Для движения вверх (выход В, 1-ое состояние) хв1=В. В карте Карно будет 64 клетки (16x4).
хв1 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
||||
хв2 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
||||
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
|||||
ПН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ПВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
РН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
РВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Тогда
![]()
Аналогично для движения вниз:
хв1 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
хв2 |
|
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
||||
|
|
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
||||
|
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|||||
ПН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ПВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
РН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
РВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Тогда
![]()
Пятый шаг – реализация.