

Составление алгоритмов функционирования последовательностей технологических операций.
Математическое описание последовательности ТО с учетом контроля условий для их смены является одной из разновидностей алгоритмов АСУТП. Эти задачи решаются синтезом комбинационных или последовательностных логических схем при формировании циклов, состоящих из ограниченного числа дискретных технологических тактов. Перед синтезом схемы требуется провести анализ последовательности технологических тактов. Сами последовательности могут быть детерминированными (определенными) и стохастическими (случайными).
Технологическим тактом – называется интервал времени, в течение которого не изменяются технологические параметры (комбинации работающих механизмов, их скорости, нагрузки и т.д.) Переход от одного такта к другому определяется изменением одного или нескольких параметров.
Технологический цикл – представляет собой дискретную последовательность смены технологических тактов при выполнении производственных операций.
Формализованное представление состояний управляющих входов (Z), информации с датчиков (X) и выходов исполнительных органов, обеспечивающих требуемую смену технологических тактов, является алгоритмом функционирования детерминированного Т-цикла.
![]()
t – входит в формулу неявно.
Формализация технологического цикла осуществляется в следующей последовательности:
технологический цикл разбивается на отдельные такты. Дается содержательное вербальное описание последовательности смены всех тактов.
Производится анализ переходов от одного такта к другому, т.е. изменением каких Z и X (см. выше) сопровождается каждый переход. Устанавливаются причинно-следственные связи между входами и выходами, кроме того, определяется необходимость установки дополнительных датчиков для выполнения технологии и ликвидации критических режимов.
Составляется формализованное представление алгоритма функционирования в виде таблицы истинности, таблицы переходов или циклограммы.
Таблица истинности
Таблицы истинности применяют при однозначном соответствии состояния выхода комбинациям состояний управляющих входов.
Пример
Пусть требуется произвести сортировку деталей на конвейере по наружному диаметру. Сортировка осуществляется с помощью 3 датчиков. Если деталь проходит под датчиком, то его выходной сигнал равен 1. Допустим, что если срабатывает один датчик, то деталь должна идти в бункер Б1. Если сработали 2 датчика, то в Б2. Если все три – то в бункер Б3.
Т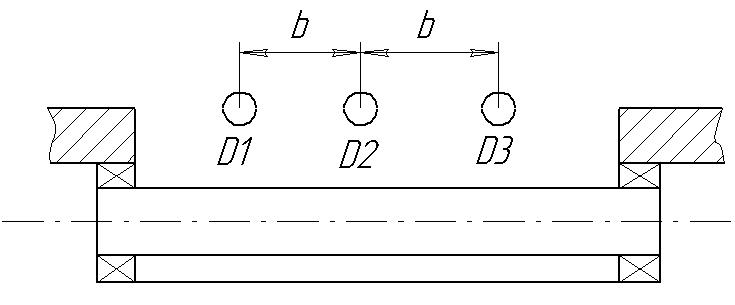 аблица
истинности составляется для всех
возможных комбинаций состояний входов
(датчики). Число таких комбинаций равно
2n, где n
– число входов.
аблица
истинности составляется для всех
возможных комбинаций состояний входов
(датчики). Число таких комбинаций равно
2n, где n
– число входов.
входы |
выходы |
||||
D1 |
D2 |
D3 |
Б1 |
Б2 |
Б3 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
х |
х |
х |
1 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
Проведем минимизацию для выходов Б1, Б2, Б3 с помощью карт Карно.
Для Б1 без учета ситуации *:
|
|
D2 |
D3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
1 |
D1 |
|
1 |
0 |
0 |
1* |
![]() (1)
(1)
Примем *=1:
![]() (2)
(2)
Как видно, выражение (2) проще чем (1), отсюда следует, что нужно применять все возможные наборы, в том числе и запрещенные, которые принимать равными 0 или 1 в зависимости от удобства того или иного значения.
Для Б2 без *:
|
|
D2 |
D3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
0 |
D1 |
|
0 |
1 |
0 |
0* |
Здесь ставить вместо * единицу не выгодно, т.к. увеличивается количество контуров. Но ставить 0 также нет смысла, т.к. функция, составленная по 0, идентична составленной по 1.
![]()
Для Б3 без *: ![]()
|
|
D2 |
D3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
D1 |
|
0 |
0 |
1 |
1* |
При *=1 имеем
![]() ,
выражение упростилось, при этом деталь
будет отсортирована правильно даже при
неработоспособности D2.
С другой стороны, ситуация
,
выражение упростилось, при этом деталь
будет отсортирована правильно даже при
неработоспособности D2.
С другой стороны, ситуация
![]() может означать наличие на конвейере
двух мелких деталей одновременно и
выражение
в таком случае приведет к неправильной
сортировке. Т.е. интерпретация запрещенной
комбинации в каждом конкретном случае
должна следовать из условий технического
задания.
может означать наличие на конвейере
двух мелких деталей одновременно и
выражение
в таком случае приведет к неправильной
сортировке. Т.е. интерпретация запрещенной
комбинации в каждом конкретном случае
должна следовать из условий технического
задания.
Таблица переходов
Таблица переходов применяется в случае, когда необходимо учитывать последовательность смены состояний входов и выходов в предыдущих тактах (последовательностные логические устройства).
Правила заполнения таблиц переходов:
Число строк таблицы соответствует числу возможных состояний выхода.
Число столбцов – числу 2n возможных комбинаций n входных переменных.
Крайний левый столбец фиксирует исходные состояния выходов.
В клетках проставляются номера переходов, обусловленных исходной и вновь возникшей комбинацией входов.
Под таблицей располагается мнемосхема.
Пример:
П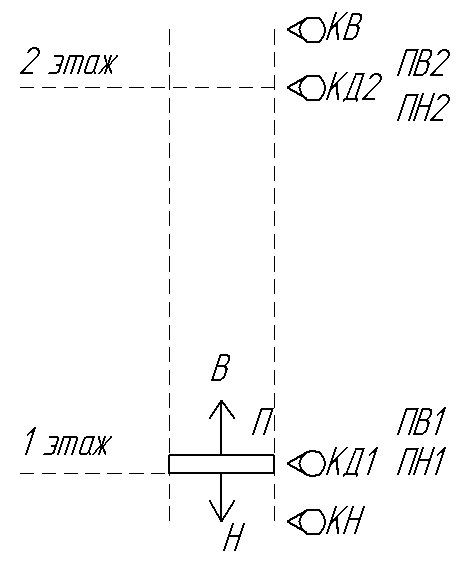 одъемник
перемещается с одного этажа на другой
реверсивным приводом, включаемый
исполнительными элементами В (вверх) и
Н (вниз). Пусть управление подъемником
осуществляется при помощи этажных
кнопок ПВ1, ПН1, ПВ2, ПН2. Возможные аварийные
ситуации предотвращаются при помощи
реле перегрузки РП, конечных выключателей
КН, КВ и контроля закрытия дверей КД1 и
КД2.
одъемник
перемещается с одного этажа на другой
реверсивным приводом, включаемый
исполнительными элементами В (вверх) и
Н (вниз). Пусть управление подъемником
осуществляется при помощи этажных
кнопок ПВ1, ПН1, ПВ2, ПН2. Возможные аварийные
ситуации предотвращаются при помощи
реле перегрузки РП, конечных выключателей
КН, КВ и контроля закрытия дверей КД1 и
КД2.
Все задающие (входные) переменные могут быть сведены к четырем:
Пуск вверх ПВ – нажатие кнопки «вверх» на любом из этажей.
![]()
Пуск вниз ПН – нажатие кнопки «вниз» на любом из этажей.
![]()
Разрешение двигаться вверх РВ – закрыты все двери, не нажат КВ и нет перегрузки.
![]()
Разрешение двигаться вниз РН – закрыты все двери, не нажат КН и нет перегрузки.
![]()
При 4-х входных сигналах ПВ, ПН, РВ, РН число возможных комбинаций – 16, т.е. число столбцов в таблице = 16. Число возможных выходных комбинаций равно 3 – это число строк в таблице.
Состояния выхода:
Движение вверх – 1
Движение вниз – 2
Кабина неподвижна – 3
Тогда таблица переходов выглядит так:
Исходное состояние |
Такты (наборы) |
||||||||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
||
Дв. вверх (1) |
3 |
3 |
3 |
3 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
3 |
3 |
3 |
3 |
|
Движение вниз (2) |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
|
Кабина стоит (3) |
3 |
3 |
3 |
3 |
3 |
3 |
1 |
3 |
3 |
1 |
3 |
2 |
2 |
3 |
3 |
3 |
|
Мнемо-схема |
ПВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Наборы приведены в таком виде для того, чтобы выделить сигналы РВ и РН, а вообще порядок составления мнемосхемы и распределения наборов произвольный (однако все возможные комбинации должны быть отражены).
В первой строке исходным является сигнал движения вверх (1), поэтому в таблице во всех клетках соответствующих РВ ставится 1 (продолжение движения). При отсутствии РВ кабина должна быть неподвижна, поэтому ставим переход в 3. Аналогично заполняется вторая строка. В третьей строке исходным состоянием является неподвижность, поэтому переходы заполняются следующим образом:
1-4 |
3, т.к. нет РВ и нет РН |
5 |
3, т.к. движение д.б. вверх, но нет РВ |
6 |
3, т.к. сигналы ПВ и ПН противоречат друг другу |
7 |
1, т.к. есть РВ и ПВ |
8-9 |
3, т.к. нет вызова ПВ или ПН |
10 |
1, т.к. есть РВ и ПВ |
11 |
3, т.к. сигналы ПВ и ПН противоречат друг другу |
12-13 |
2, т.к. есть РН и ПН |
14 |
3, т.к. сигналы ПВ и ПН противоречат друг другу |
15 |
3, т.к. есть ПВ, но нет РВ |
16 |
3, т.к. нет вызова ПВ или ПН |