

Лабораторна робота № 1 «Передавальна функція розімкненої цифрової системи»
Мета роботи: вивчення студентами методики отримання z-передавальної функції розімкненої цифрової системи для опису її в частотної області на підставі передавальної функції безперервної частини системи із використанням модифікованого z-перетворення.
1. Теоретичні відомості
1.1 Отримання z-передавальної функції цифрової системи
Цифровою
системою називають систему автоматичного
керування, у складі якої як управляючий
пристрій використовується цифрова
обчислювальна машина або спеціалізований
цифрової обчислювальний пристрій. До
функцій обчислювального пристрою
відносяться кодування сигналу
![]() ,
що поступає на його вхід в дискретні
моменти часу Т,
по якому-небудь алгоритму перетворення
вхідного коду
,
що поступає на його вхід в дискретні
моменти часу Т,
по якому-небудь алгоритму перетворення
вхідного коду
![]() у вихідний
у вихідний
![]() ,
причому на це потрібний деякий час
,
причому на це потрібний деякий час
![]() ,
тобто тут виникає затримка сигналу,
запізнювання; і потім миттєве перетворення
вихідного коду фіксатором нульового
порядку у фізичну величину
,
тобто тут виникає затримка сигналу,
запізнювання; і потім миттєве перетворення
вихідного коду фіксатором нульового
порядку у фізичну величину
![]() .
Структурна схема цифрового обчислювального
пристрою наведена на рис. 1. На рис. 2
показаний загальний вигляд сигналів в
обчислювальному пристрої (тут і далі
розглядається лише амплітудно-імпульсна
модуляція).
.
Структурна схема цифрового обчислювального
пристрою наведена на рис. 1. На рис. 2
показаний загальний вигляд сигналів в
обчислювальному пристрої (тут і далі
розглядається лише амплітудно-імпульсна
модуляція).

Рисунок 1 – Структурна схема цифрового обчислювального пристрою.

Рисунок 2 – Вигляд сигналів в обчислювальному пристрої
Вихідний
сигнал обчислювального пристрою
подається на вхід ланки або об’єкту
керування, яки є ланками безперервної
дії. Послідовне з’єднання цифрового
обчислювального пристрою (рис. 1) і
об’єкту керування може бути представлено
послідовним з’єднанням ідеального
імпульсного елементу і приведеної
безперервної частини системи (рис. 3).
Приведеною безперервною частиною
системи є послідовне включення ланки
запізнення з передавальною функцією
![]() ,
формуючого елементу з передавальною
функцією
,
формуючого елементу з передавальною
функцією![]() і об’єкту керування з передавальною
функцією
і об’єкту керування з передавальною
функцією
![]() .
.
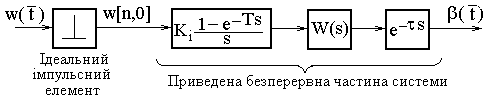
Рисунок 3 – Узагальнена структура цифрової системи
Передавальною функцією розімкненої цифрової системи є відношення зображень за z-перетворенням вихідної і вхідної величин при нульових початкових умовах.
Z-перетворення
вхідного сигналу із стрибками є
![]() ,
а зображення зміщеної гратчастої функції
на виході -
,
а зображення зміщеної гратчастої функції
на виході -
![]() ,
то відповідно передавальною функцією
розімкненої цифрової системи є
,
то відповідно передавальною функцією
розімкненої цифрової системи є
![]() .
Якщо вхідне діяння не має стрибків, то
дискретною передавальною функцією
розімкненої цифрової системи є
.
Якщо вхідне діяння не має стрибків, то
дискретною передавальною функцією
розімкненої цифрової системи є
![]() .
.
Z-передавальна
функція приведеної безперервної частини
системи може бути визначеною як
![]() .
τ – запізнювання на час перетворення
кодів у цифровому обчислювальному
пристрої і запізнювання об’єкту
керування.
.
τ – запізнювання на час перетворення
кодів у цифровому обчислювальному
пристрої і запізнювання об’єкту
керування.
Нехай
τ > Т ;
=
mT+
![]() Т,
Т,
![]() .
У цьому випадку передавальна функція
цифрової розімкненої системи розраховується
за наступною формулою (1), причому спочатку
необхідно розрахувати
.
У цьому випадку передавальна функція
цифрової розімкненої системи розраховується
за наступною формулою (1), причому спочатку
необхідно розрахувати
![]() без урахування запізнення
,
а потім визначити z-передавальну функцію
системи з урахуванням запізнення.
без урахування запізнення
,
а потім визначити z-передавальну функцію
системи з урахуванням запізнення.
![]() (1)
(1)
Z-передавальну
функцію
![]() можна розрахувати за наступною методикою.
Вираз у фігурних дужках
можна розрахувати за наступною методикою.
Вираз у фігурних дужках
![]() часто вдається розкласти на прости
доданки, відносно яких застосовується
z- перетворення:
часто вдається розкласти на прости
доданки, відносно яких застосовується
z- перетворення:
![]() , (2)
, (2)
![]()
![]()
![]()
 .
(3)
.
(3)