

2. Завдання
В наведеної нижче таблиці вказані номінальні параметри передавальні функції об’єкту керування, а також адитивна і мультиплікативна невизначеність об’єкту. Адитивна або мультиплікативна невизначеність об’єкту керування представлені передавальними функціями, які є досить доброю апроксимацією вказаних невизначеностей.
Таблиця 1 – Таблиця варіантів
№ варіанту |
Передавальна функція обьєкту |
Адитивна невизначеність |
Мультиплікативна
невизначеність
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
|
6 |
|
|
|
7 |
|
|
|
8 |
|
|
|
9 |
|
|
|
10 |
|
|
|
Для заданого в відповідному варіанті об’єкту керування необхідно засобами Matlab спроектувати P-, PI-, PID-регулятори, для чого потрібно виконати наступні кроки:
1) за допомогою Matlab/Simulink створити структурну схему замкненої системи, яка показана на рис. 6, і завдати передавальну функцію об’єкту керування .
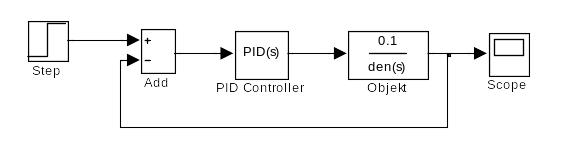
Рисунок 6 – Структурна схема системи для обрання параметрів регулятору
2) подвійним клацанням мишкою по блоку “PID Controller” відкрити вікно для налагодження регулятору. Тут слід обрати PID-регулятор, залишити позначку ”Continuous-time”, Controller Form - “Parallel” , встановити навчальні параметри регулятору (наприклад, P =1, I = 1; D = 0; N = 10), натиснуть кнопку “Apply” і потім натиснуть кнопку “Tune”;
3) в новому вікні буде показано перехідний процес для параметрів регулятору, які показані праворуч, якщо натиснути стрілку “Show parameters”. Перехідний процес можна покращити шляхом переміщення повзунка ліворуч (“Slower”) або праворуч (“Faster”);
4)
параметри регулятору, які отримані в
результаті виконання пункту с), необхідно
експортувати до робочої області Matlab,
для чого слід натиснути кнопку уверху
з піктогамою
![]() ”Export
plant or controller to workspace”;
”Export
plant or controller to workspace”;
5) в командному вікні Matlab слід виконати команду tf(C), результатом якої буде передавальна функція регулятору.
Пункти від 2) до 5) необхідно повторити для отримання параметрів PI- і P-регуляторів.
Після того, як параметри регуляторів визначені, необхідно провести дослідження стійкості замкненої системи з урахуванням адитивної і мультиплікативної невизначеності моделі об’єкту. Для перевірки робастної стійкості замкненої системи використовуються один або кілька критеріїв стійкості (7) – (10) або (14) – (16).
2.1 Методичний приклад
Нехай
номінальною передавальною функцією
об’єкту і передавальною функцією
регулятору є
![]() відповідно, а адитивна невизначеність
може бути добре апроксимованою
передавальною функцією
відповідно, а адитивна невизначеність
може бути добре апроксимованою
передавальною функцією
![]() .
У логарифмічному масштабі
.
У логарифмічному масштабі
![]() має наступний вигляд (рис. 7).
має наступний вигляд (рис. 7).
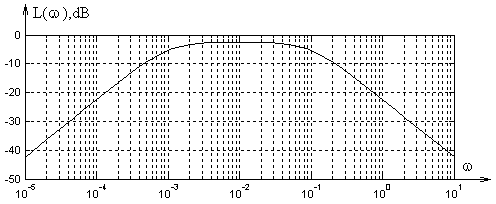
Рисунок 7 – ЛАЧХ адитивної невизначеності передавальної функції об’єкту
При
частоті =0
статичний коефіцієнт підсилення об’єкту
визначений досить точно, тому
![]() .
В області високих частот в наслідок
того, що об’єкт має властивості фільтру
низьких частот,
.
В області високих частот в наслідок
того, що об’єкт має властивості фільтру
низьких частот,
![]() ,
тому і
,
тому і
![]() .
.
Мультиплікативна
похибка визначається як відношення
адитивної похибки до номінальної
комплексної передавальної функції,
тобто
![]() .
Якщо адитивна похибка встановлена, то
легко визначити і мультиплікативну
похибку (рис. 8). У даному прикладі
.
Якщо адитивна похибка встановлена, то
легко визначити і мультиплікативну
похибку (рис. 8). У даному прикладі
![]() можна апроксимувати передавальною
функцією виду
можна апроксимувати передавальною
функцією виду
![]()
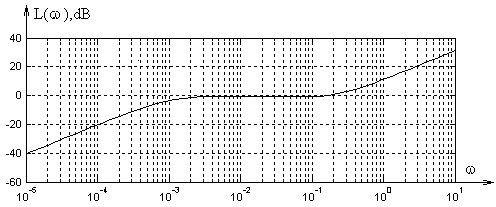
Рисунок 8 – ЛАЧХ мультиплікативної невизначеності
Для оцінки робастної стійкості замкненої системи з врахуванням адитивної невизначеності нехай буде використано критерій (7), для якого потрібні передавальна функція регулятору, функція чутливості и адитивна похибка. За допомогою функції Matlab tf( ) створимо потрібні функції: K=tf([3 1.3 0.11],[1 0.5 0]) – для регулятору, F=tf(1,[37.5 12.5 1]) – для об’єкту, S = feedback(1,K*F,-1) – функція чутливості, Ad=tf([950 0],[1e4 1010 1]) – адитивна похибка. Після чого достатньо побудувати ЛАЧХ продукту K*F*Ad і перевірити, чи буде ЛАЧХ менш ніж нуль. В наведеному прикладі ЛАЧХ у діапазоні 0,1≤ ω ≤0,3 (див. рис.8) більш ніж нуль, тобто модуль продукту |K*F*Ad(jω)| більш одиниці, а це означає, що робастна стійкість системи на гарантується. Аналогично перевіряеться робастна стійкість для системи з мультиплікативною невизначеностю.
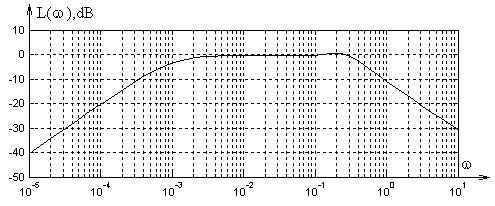
Рисунок 9 – ЛАЧХ послідовного включення регулятору, функції
чутливості і адитивної похибки. Робастна стійкість не гарантована.
3. Зміст звіту
У звіти представити:
1. Варіант завдання.
2. Графічне представлення і апроксимацію передавальними функціями адитивної і мультиплікативної невизначеності передавальної функції об’єкту.
3. Передавальні функції P-, PI-, PID-регуляторів і оцінку робастної стійкості системи з кожним з цих регуляторів як для адитивної, так і для мультиплікативної похибки визначення передавальної функції об’єкту.
4. Аналіз отриманих результатів.
5. Висновки по роботі.