

3.2. Физика измерения усилий
Нуждающиеся в измерении усилия и крутящие моменты, действующие на детали машин и механизмов, элементы конструкций и сооружений могут принимать значения в очень широком диапазоне – в задачах контроля управляемых технологических процессов они достигают по верхней границе 106–108 Н, а по нижней – 10-5–10-12 Н. Таким образом, полный диапазон измеряемых усилий составляет 1020, и задача создания единых измерителей на весь диапазон потребностей пока неразрешима. Помимо очевидных методов уравновешивания и использования деформации упругих пружин для измерения механических усилий используют различные физические свойства материалов, в частности:
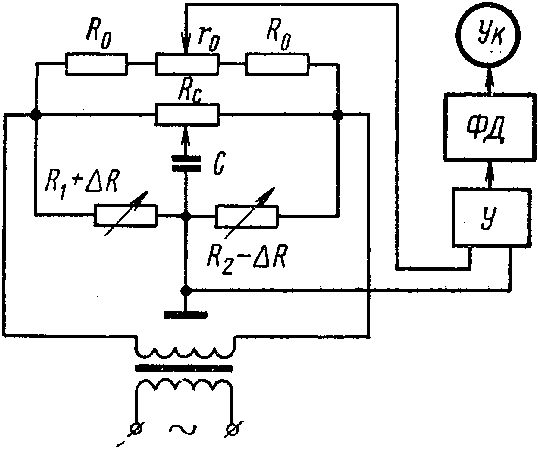
Зависимость омического сопротивления некоторых сплавов (константан, нихром, платинородий) от величины упругих деформаций используется для измерения усилий в тензометрических преобразователях с проволочными, фольговыми или полупроводниковыми тензорезисторами. Тензорезистор приклеивается к несущему нагрузку упругому элементу с близкими к тензоматериалу коэффициентами температурного расширения и испытывает одинаковые с ним упругие деформации под действием приложенных к несущему элементу сил. Сам тензорезистор включается в измерительный резисторный мост для преобразования результата (изменения омического сопротивления) в электрический сигнал. Полупроводниковые тензорезисторы изготавливаются из монокристаллов кремния, германия, арсенида галлия и др. – они отличаются высоким коэффициентом тензочувствительности (-200 – +850) при малых размерах (до 2,5 мм). Ниже на рисунке приведена типовая мостовая схема с тензорезисторами R1 и R2, один из которых испытывает деформацию растяжения, а другой деформацию сжатия: такое дифференциальное включение позволяет устранить температурную погрешность и вдвое увеличить чувствительность. Снимаемый с измерительной диагонали моста сигнал требует усиления по мощности, поэтому подается на указатель Ук через усилитель У и фазочувствительный демодулятор ФД.
Эффект изменения магнитных свойств материалов (электротехническая сталь, никелевые сплавы, пермаллой) под действием механических напряжений (магнитная упругость); измеряемая величина в магнитоупругих преобразователях – индуктивность катушки, намотанной на нагружаемый сердечник, преобразуемая в электрический сигнал с помощью индуктивной мостовой схемы. Другой вариант таких преобразователей основан на магнитной анизотропии упруго нагруженных ферромагнетиков и использует для преобразования взаимоиндукцию двух взаимно перпендикулярных катушек.


Магнитоупругий преобразователь взаимоиндуктивного типа в ненагруженном и нагруженном состоянии
Пьезоэффект – возникновение электрических зарядов на гранях некоторых кристаллов (пьезоэлектриков) при приложении к другим граням механических усилий; типичными представителями пьезоэлектриков являются кварц (двуокись кремния) с ненарушенной (например, плавлением) кристаллической решеткой и титанат бария. Величина заряда при этом не зависит от размеров пьзоэлемента, а определяется только значением силы и величиной пьзоэлектрической постоянной (модуля, зависящего от свойств материала – для кварца 2,1·10-12 Кл/Н). В связи с большим внутренним сопротивлением пьезоэлектрического преобразователя и малой мощностью сигнала, выходное напряжение требует усиления с помощью усилителей с большим входным сопротивлением (1014 Ом).