

3.1.3, Б. Завдання статичної моделі нелінійної функції двох змінних
Розглянемо другий варіант побудови статичної моделі ПФВШО в Vissim'е. Оскільки формула двовимірної статичної характеристики відома, вона отримана вище, то можна просто побудувати в Vissim'е схему, що реалізує алгоритм обчислення відповідно до цієї формули:
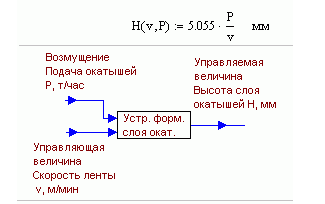

Рис. 1.11 Формула двомірної статичної характеристики ПФВШО, його модель у вигляді складеного блоку і вміст складеного блоку, формула перекриває весь діапазон зміни швидкості конвеєра (1.3 - 1.5 м/хв) і швидкостей подачі окатишів (60 - 100 т/год)
Звернемо увагу на те, що модель здійснює розподіл на швидкість стрічки. Отже, не можна допустити, щоб в процесі роботи моделі швидкість стрічки могла стати рівною нулю, інакше Vissim видасть повідомлення про помилку. Щоб уникнути цього недоліку моделі можна додати до дільнику дуже малу, у порівнянні з характерною швидкістю конвеєра, величину, наприклад 0.000001.
Для отриманої моделі також можуть бути побудовані статичні характеристики:
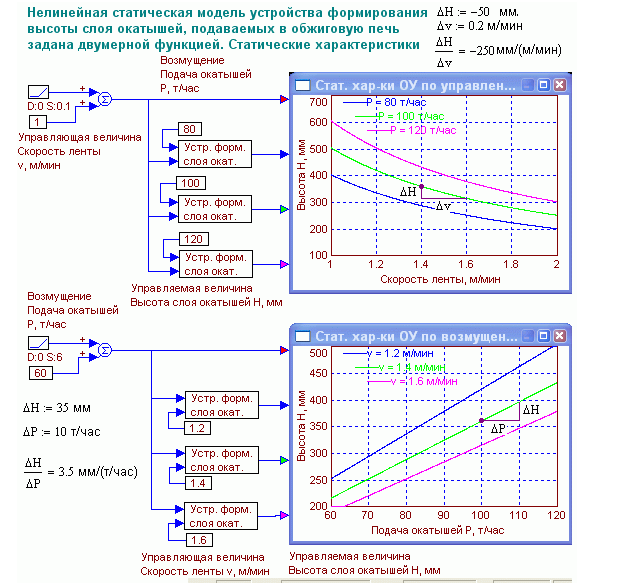
Рис. 1.12 Модель, що реалізує формулу двовимірної статичної характеристики, і статичні характеристики ПФВШО
Результати ті ж, що і на рис. 1.9, де моделювання проведено за допомогою блоку табличного завдання нелінійності map. Як видно, експериментальні статичні характеристики моделі ПФВШО, заданої функції двох змінних відповідають цим же статичним характеристикам, отриманим раніше аналітично в Mathcad.
Динамічні характеристики та моделі об'єкта управління
Динамічна модель ПФВШО - та ж сама, що і статична, оскільки цей пристрій в даному розгляді безінерційний. Тому динамічні характеристики об'єкта управління буде в даному випадку визначати тільки ДПС, який входить в нього.
Динамічні моделі ДПС
Ідентифікувати об'єкт управління, зокрема, ДПС, можна двома методами:
- Теоретичним, шляхом побудови його аналітичної математичної моделі, що спирається на фізичні закони, яким підкоряються взаємопов'язані і взаємодіючі елементи ідентифікованого об'єкта. Таку модель можна назвати структурно-динамічною.
- Експериментальним, коли модель будується за результатами аналізу відгуку ідентифікованого об'єкта на деякі пробні, в тому числі типові, впливи. Таку модель можна назвати.
Структурно-динамічна модель ДПС
Рівняння динаміки, що описують ДПС і враховують як магнітну інерційність якірного ланцюга, так і інерційність обертових мас, приведених до валу двигуна, такі:
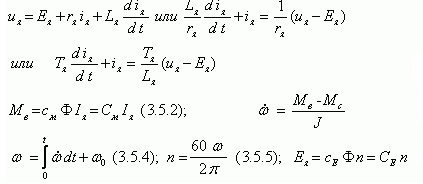
Як видно, всього рівнянь шість, причому три з них диференціальні (перше, третє і четверте), вони описують інерційність, і три - алгебраїчні, вони відповідають безінерційним перетворенням фізичних величин.
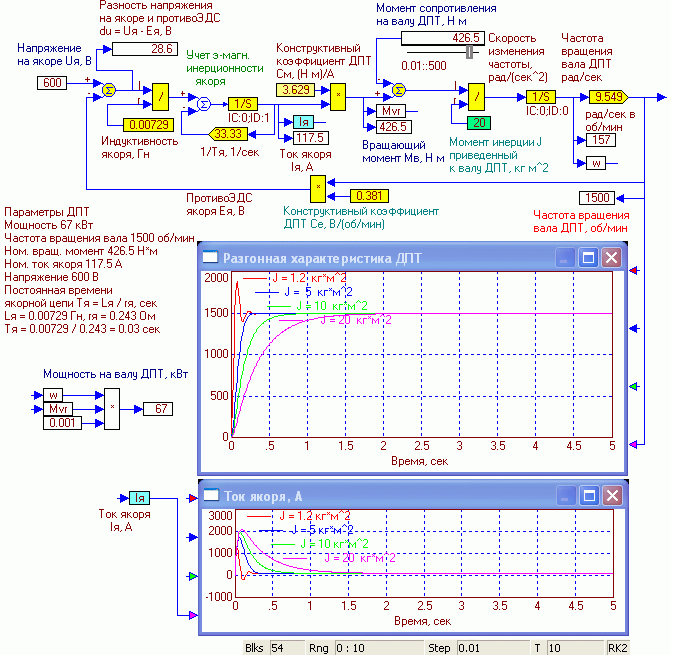
Рис. 1.13. Лінійна динамічна модель ДПС, побудована відповідно до рівняннянь, що описують електричні, магнітні і механічні фізичні процеси в ньому. ДПС конструюють так, щоб у перехідних режимах не виникали коливання, тому у розглянутого ДПС момент інерції одного тільки якоря насправді становить 5 Н м, а з приведеними до валу масами і більше. Іншими словами, розгінна характеристика, знята для моменту інерції J= .2 кг*м2, який менше власного моменту інерції якоря, є умоглядною, вона приведена для того, щоб показати межі застосування моделі
Поведінкова динамічна модель ДПС
Для отримання моделі виду Вхід - Вихід скористаємося, як і раніше, можливістю визначення передавальних функцій фрагментів схеми, яку надає Vissim. В результаті отримаємо:
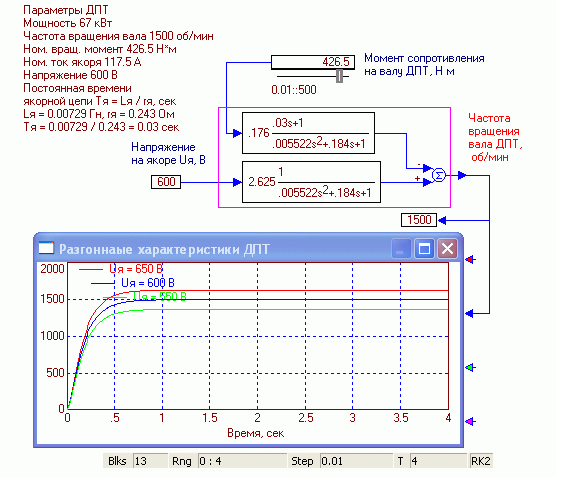
Рис. 1.14. Проста модель ДПС з незалежним збудженням типу Вхід - Вихід. Момент інерції, приведений до валу дорівнює 10 кг м2. Розгінна характеристика (синя, для U= 00 В) збігається з розгінної характеристикою повної динамічної моделі (рис. 2.25, для J=10 кг м2 - зелена)
Повна динамічна нелінійна модель ОУ САР висоти шару окатишів
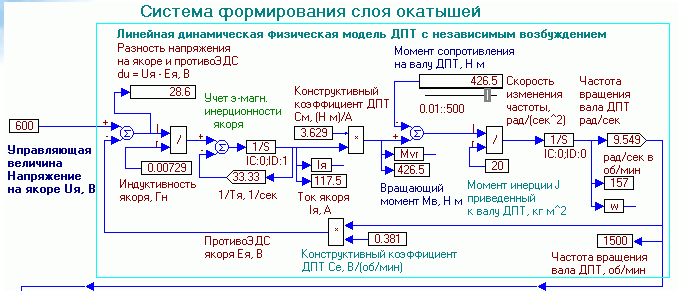
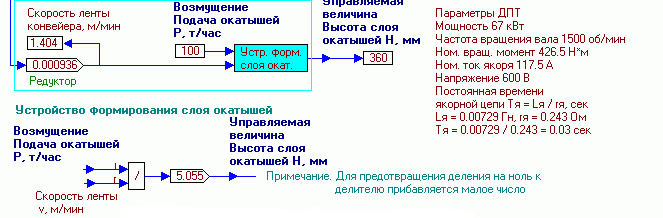
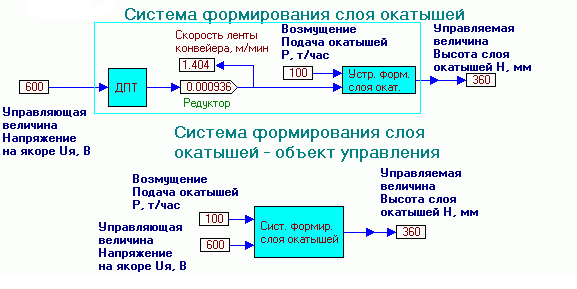
Рис.1.15. Повна нелінійна модель системи формування шару окатишів і згортка її в составний блок
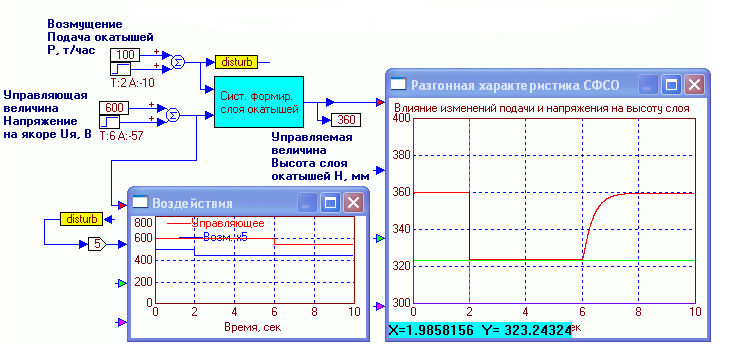
Рис. 1.16 Динаміка системи формування шару окатишів - об'єкта управління САР стабілізації висоти шару
Як видно, зменшення швидкості подачі окатишів на 10 т/год призводить при незмінній швидкості конвеєра до негайного зменшення висоти шару на 37 мм. Це зменшення поступово компенсується ступінчастим зменшенням напруги на 57 В. Таким чином моделлю об'єкта управління можна управляти в ручному режимі, досліджуючи його поведінку. Це особливо важливо для дипломника, якого навряд чи пустять дослідити реальний об'єкт.
Висновки.
Отже, побудовані кілька моделей об'єкта управління. Основні з них це статична і динамічна. Кожна з моделей виконана в двох варіантах: структурно-фізичному і поведінковому. Перший варіант дозволяє поглянути в процесі роботи моделі всередину об'єкта, визначити, наприклад величини струмів якоря, момент, що обертає. Якщо цього не потрібно, то достатньо скористатися поведінкової моделлю, яка в САР буде вести себе точно так само, як і повна модель. Залишається побудувати, оптимізувати і дослідити поведінку САР.