

Рефлекторное кольцевое регулирование
Основные разработки в области физиологии произвольных актов были проведены Н. А. Бернштейном и П. К. Анохиным, проанализировавшими как многоуровневость их регуляции так и роль в поведении афферентных механизмов.
Будучи первым руководителем лаборатории биомеханики движений, Н. А. Бернштейн отказался от традиционных для начала XX века методов исследования движений, сопряженных с перерезкой нервов, разрушением центров и обездвиживанием животных. Объектом его изучения стали естественные трудовые, спортивные, бытовые движения нормального, неповрежденного организма человека.
В соответствии с доминирующими взглядами того времени, реализация двигательного акта осуществляется следующим образом. На этапе обучения в двигательных центрах формируется и фиксируется программа движения, затем в результате какой-либо стимуляции она возбуждается и в мышцы направляются моторные командные импульсы, приводящие к самому движению. В самом общем виде механизм движения описывается схемой и принципом рефлекторной дуги: стимул - его центральная переработка - двигательная реакция.
Основным теоретическим положением, выдвинутым Н. А. Бернштейном в отношение человеческого поведения явился тезис, согласно которому сколько-нибудь сложное движение на основе только рефлекторного принципа осуществляться не может (но относительно примитивные двигательные акты типа коленного рефлекса или отдергивания руки от огня ему подчиняются). Обусловлено это тем, что сложные движения зависят не только от управляющих сигналов, но и от целого ряда дополнительных факторов, не поддающихся предварительному учету и вносящих в запланированный ход движений множество отклонений (реактивные, инерционные воздействия, внешние влияния, исходное состояние мышц и т.п.). В результате окончательная цель движений может быть достигнута, только если в него будут вноситься соответствующие поправки или коррекции. Для этого ЦНС должна учитывать реальные параметры текущего движения, то есть в нее должны непрерывно поступать афферентные сигналы об актуальном положении органа, его отклонении от цели и перерабатываться в сигналы коррекции. Этот механизм регуляции выполнения сложных движений был назван принципом сенсорных коррекций.
И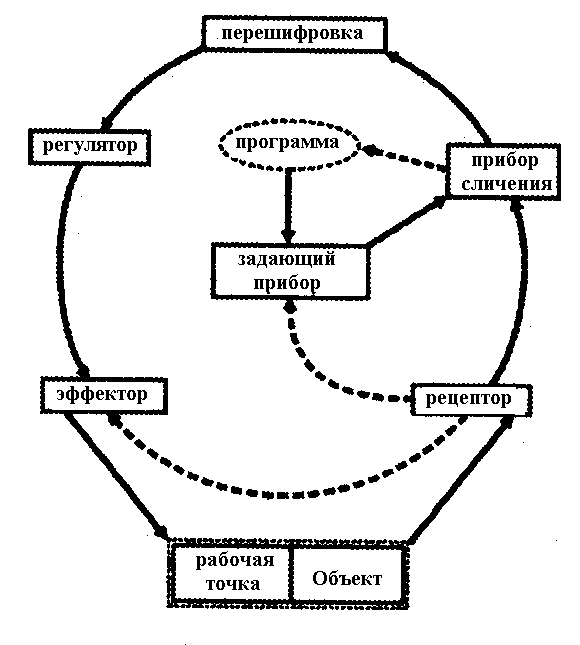 з
него логически вытекал другой принцип,
сформулированный Н. А. Бернштейном в
1934 г. - это принцип
рефлекторного кольца - относительной
замкнутости и непрерывности циркуляции
сенсорной кинестетической
информации, черпаемой из движения и
реализующейся в двигательных актах.
Обычный рефлекс в соответствии с этим
принципом является лишь частным
случаем движения, не нуждающегося в
коррекции (рис. 3).
з
него логически вытекал другой принцип,
сформулированный Н. А. Бернштейном в
1934 г. - это принцип
рефлекторного кольца - относительной
замкнутости и непрерывности циркуляции
сенсорной кинестетической
информации, черпаемой из движения и
реализующейся в двигательных актах.
Обычный рефлекс в соответствии с этим
принципом является лишь частным
случаем движения, не нуждающегося в
коррекции (рис. 3).
◄Рис 3. Схема рефлекторного кольца Н.А. Бернштейна
(по Ю.Б. Гиппенрейтер)
Обратив внимание на качество афферентных сигналов, поступающих при движении, Н. А. Бернштейн приходит к выводу что существует несколько уровней их построения, подразумевающих включенность различных морфо-функциональных слоев ЦНС - спинного и продолговатого мозга, подкорковых центров и коры.
Субкортикальные уровни.
Уровень А - (руброспинальный) самый низкий и филогенетически самый древний, включающий спинной мозг и группу ядер продолговатого мозга. У человека он обеспечивает такие важные составляющие любой деятельности, как тонус мышц, силовые, скоростные и другие характеристики сокращений мышц, то есть те аспекты функционирования, которые связаны с сегментарным аппаратом спинного мозга и фоновыми изменениями его возбудимости. Этот уровень также включает немногочисленные движения, регулируемые самостоятельно - непроизвольную дрожь, стук зубами от холода, быстрое вибрато при игре не некоторых музыкальных инструментах, удержание позы в полетной фазе прыжка и т.п. Патология уровня А проявляется нарушениями тонуса мышц, называемых дистониями, а также треморами покоя и движения.
Уровень В - синергии (таламо-паллидарный) - согласованных действий мышц-антагонистов, включающий зрительные бугры в качестве афферентных центров и бледные тела в качестве эффекторных. Этот уровень определяет всю внутреннюю структуру пластики, сочетание отдельных слагаемых двигательных комплексов в сложные соединения. Здесь обеспечиваются мышечные синергии во времени, то есть правильные чередования отдельных комплексов движений в общем ритме, что и обусловливает некоторый элемент штампованности самих движений. Особенностью организации функционирования этого уровня является специфическая организация афферентного потока - деятельность дистантных анализаторов в обеспечении функционального состояния этого уровня практически не сказывается. На нем перерабатываются сигналы от мышечно-суставных рецепторов, которые сообщают о взаимном положении и движении частей тела. Общий итог работы этого уровня выступает в качестве таких врожденных особенностей моторики, как: ловкость, грациозность, пластика (например, при исполнении вольной гимнастики), проявляется в индивидуальных особенностях движений, в том числе в мимике и пантомимике. По образному выражению Н. А. Бернштейна, в случаях патологии этого уровня «из глубин моторики вылезают уродливые, гротескные фоны без фигур и передних планов, без смысла и адекватности:... спазмы, обломки древних движений, ... непроизвольные рычания и вскрикивания - психомоторные химеры, безумие эффекторики».
Следующие уровни построения движений являются кортикальными.
Уровень С - пространственного поля (пирамидно-стриальный). Функционирует с учетом всей информация о внешнем пространстве, получаемой через дистантные рецепторы (включая зрительный и слуховой) и имеет выраженный целевой характер, обращенный во внешний мир. Движения имеют вектор и ясные начальные и конечные координаты. К этому уровню относятся все переместительные движения - ходьба, лазанье, прыжки, акробатические движения, упражнения на гимнастических снарядах, баллистические движения при метании, игра на бильярде, стрельба из винтовки и т.д. Патология этого уровня сопровождается нарушениями пространственной координации (дистаксией или атаксией), равновесия, локомоции и точности (меткости).
Уровень Д - теменно-премоторный или уровень предметных действий, которые не являются врожденными, а формируются и совершенствуются в процессе накопления опыта. Это монопольно человеческий, корковый уровень, особенностью исполнения движений на котором является то, что последние сообразуются с логикой структуры объекта, то есть являются действиями (одна и та же цель может быть достигнута разными способами). Примерами действий на этом уровне являются манипуляции жонглера, фехтовальщика, все бытовые движения, работа гравера, хирурга, управление автомобилем и т.п.
Уровень Е - интеллектуальных двигательных актов - речевых движений, письма, символических движений, кодированной речи (жестов глухонемых, азбуки Морзе), хореографических движений и т.п.
Необходимо иметь в виду, что работа более высоких уровней не исключает, а напротив, подразумевает все эффекты реализации уровней более низких. Поэтому в ряде случаев, при возникновении патологического очага в соответствующих участках мозга, потеря управления движениями на более высоком уровне будет приводить к неадекватному выпячиванию в симптоматике работы нижележащих, но сохранных функциональных структур.
Таким образом, замкнутая система рефлекторного кольцевого регулирования характерна для осуществления различных форм двигательных действий и позных реакций, не требующих быстрого двигательного акта. Это позволяет нервным центрам получать информацию о состоянии мышц и результатах их действий по различным афферентным путям и вносить поправки в моторные команды по ходу действия.
Наличие циклических взаимосвязей между различными отделами нервной системы позволяет говорить о замкнутой системе регулирования, или замкнутом цикле регулирования.
В процессе двигательной деятельности одновременно возникает множество замкнутых циклов регулирования (например, между корой и ретикулярной формацией, между корой и мозжечком, между мотонейронами спинного мозга и мышцей и др.).
Таким образом, система регуляции движения является многоэтажной (многоуровневой) системой. Важную роль в этой сложной функциональной системе играет кора больших полушарий, которая управляет процессами, протекающими в этих циклах регулирования, и направляет их на решение общей задачи – достижение рабочего эффекта, или цели движения.
Программное управление по механизму центральных команд – это механизм регуляции движений, независимый от афферентных проприоцептивных влияний. Такое управление используется в случае выполнения кратковременных движений (прыжков, бросков, ударов, метаний), когда организм не успевает использовать информацию от проприорецепторов мышц и других рецепторов. Вся программа должна быть готова еще до начала двигательного акта. При этом отсутствует замкнутое кольцо регуляции. Управление производится по так называемой открытой петле, а активность во многих произвольно сокращающихся мышцах возникает раньше, чем регистрируется обратная афферентная импульсация. Например, при выполнении прыжковых движений электрическая активность в мышцах, направленная на амортизацию удара, возникает раньше, чем происходит соприкосновение с опорой, т.е. она носит предупредительный характер.
Такие центральные программы создаются согласно сформированному в мозге (главным образом в ассоциативной переднелобной области коры) образу двигательного действия и цели движения. В дальнейшей конкретной разработке моторной программы принимают участие мозжечок (латеральная область его коры) и базальные ядра (полосатое тело и бледное ядро). Информация от них поступает через таламус в моторную и премоторную области коры и далее – к исполнительным центрам спинного мозга и скелетным мышцам.
Представления о существовании моторной коры как специализированной зоны мозга сложились во второй половине 19 в. в результате исследований Э Гитцига и Г. Фрича (1870), обнаруживших, что раздражение током отдельных участков головного мозга может вызывать изолированные движения различных конечностей. Еще раньше на возможную связь между локальными поражениями мозга и нарушениями движений обратил внимание X. Джексон.
По А. Р. Лурия, реальным анатомическим и функциональным образованием, включенным в реализацию двигательного акта, помимо собственно моторных зон, является почти вся кора больших полушарий. Передние отделы мозга связаны с построением разворачивающихся во времени кинетических программ двигательного акта, а задние отделы - с их кинестетическим и пространственно-обусловленным обеспечением. Если же конкретизировать эфферентные механизмы исполнения движений, то традиционно к ним относят две взаимосвязанные, но относительно автономные системы - экстрапирамидную и пирамидную, корковые отделы которых составляют единую сенсомоторную зону коры. Обе системы реально представляют общий эфферентный механизм, различные уровни которого отражают различные этапы эволюции становления произвольных двигательных функций.
Экстрапирамидная система - обеспечивает сравнительно простые автоматизированные движения. Она управляет в основном непроизвольным компонентом движений, к которому относятся поддержание позы, регуляция физиологического тремора, физиологические синергии, общая согласованность двигательных актов, их интеграция и пластичность. Объем подобных движений по сравнению с произвольными составляет порядка 90%. Структурный состав экстрапирамидной системы среди исследователей окончательно не согласован. Традиционно в ней различают корковый и подкорковый отделы. К первому относят 6, 8 поля моторной коры и 1 и 2 поля сенсомоторной области.
Подкорковый отдел сложен и включает стриопаллидарную систему, некоторые ядра таламуса, красное ядро и черную субстанция ножек мозга, мозжечок и ретикулярную формацию продолговатого мозга. Выход экстрапирамидной системы в спинной мозг осуществляется через красное ядро (в нем происходит подключение регулирующих влияний от мозжечка, промежуточного мозга и подкорковых ядер). Заканчивается эта проводящая система также на передних рогах спинного мозга (рис. 4).
.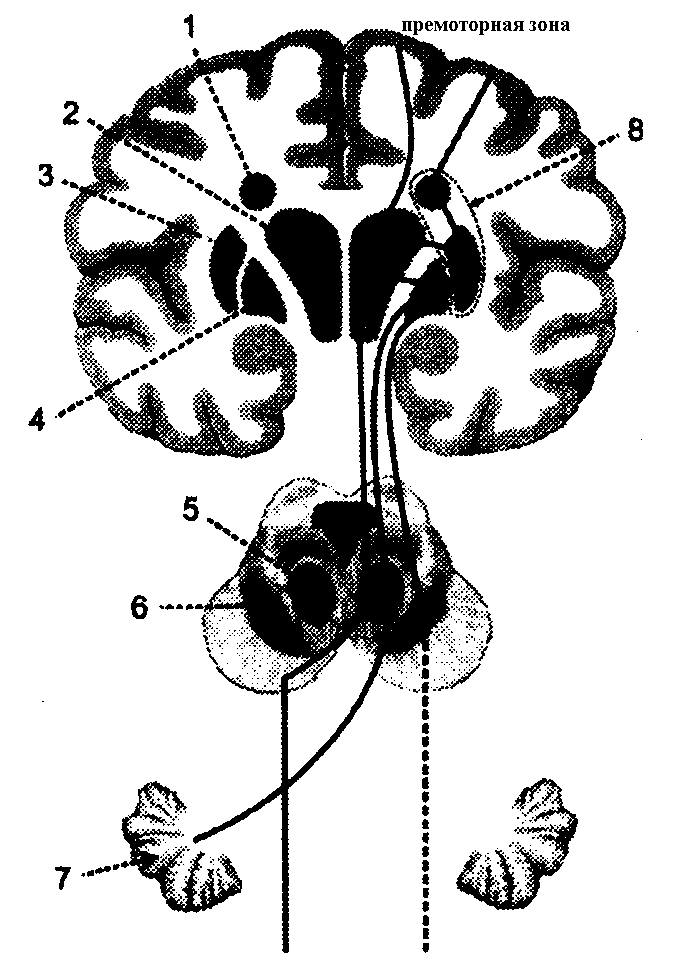
◄Рис.4. Схема взаимодействия компонентов экстрапирамидной системы.
1. фрагмент хвостатого ядра;
2. таламус;
3. скорлупа;
4. бледный шар (1,3,4 стриопали-дарная система);
5. красное ядро ножек мозга;
6. черная субстанция;
7. мозжечок;
8. полосатое тело;
Моделью работы рано созревающего и еще неконтролируемого корой паллидарного комплекса являются беспорядочные, нецеленаправленные движения бодрствующего ребенка первых месяцев жизни. С развитием коры все активные движения в основном начинают регулироваться ею — возрастает их координированность, плавность, логическая упорядоченность, появляется согласованность кинетических фрагментов с конечным результатом.
Поражения подкорковой части экстрапирамидной системы приводит к патологии двух родов - к динамическим нарушениям (собственно движений) и статическим нарушениям (позы). При повреждениях стриопаллидарной системы характерны: общая неподвижность (адинамия), сопровождающаяся мышечной слабостью, трудности передвижения, могут появиться насильственные движения в руке, ноге или головой (гиперкинезы). Тогда же возникают нарушения мышечного тонуса, составляющего основу позы, регистрируются нарушения мимики и пантомимики в виде маскообразного лица, насильственного смеха или плача (симптомы хореи, паркинсонизма). Эти, иногда сложные, гиперкинезы никогда не складываются в целенаправленные координированные действия, хотя внешне могут напоминать умышленное гримасничанье, кривляние и нарочитые ужимки.
Патология бледного шара и черной субстанции ножек мозга приводит к нарушению пластического тонуса мышц (при исполнении движений возникает феномен «зубчатого колеса»), а патология мозжечка как одной из структур экстрапирамидной системы - к расстройствам координации двигательных актов (атаксии). Последние могут сопровождаться дистопией (повышением или понижением тонуса мышц), дисметрией (излишними или недостаточными движениями), тремором (дрожанием конечностей), астазией и абазией (неспособностью сидеть и ходить). При поражениях мозжечка могут встречаться и расстройства организации речевой моторики в форме дизартрии.
Другой симптом наблюдаемый при наследственных заболеваниях с поражением экстрапирамидной нервной системы, а также при поражении базальных ганглиев разной этиологии (травма, инфекции, интоксикации), это - атетоз - медленный дистонический гиперкинез, «ползущее» распространение которого в разных отделах конечностей придает непроизвольным движениям червеобразный или змееобразный характер. При вовлечении мышц туловища и лица напоминает корчи.
Нарушения других отделов экстрапирамидной системы изучены слабее.
Пирамидная система (кортико-спинальный путь) - начинается от моторных (крупных пирамидных) клеток Беца, находящихся в основном в 5 слое моторной коры 4 поля передней центральной извилины. Это первичное поле, различные участки которого связаны с иннервацией соответствующих групп мышц. Проекция его кинетической регуляции аналогична топологии 3 первичного поля кинестетического анализатора.
Кроме того, моторные клетки Беца обнаруживаются в 6 и в 8 полях пре-центральной зоны коры и даже в некоторых постцентральных отделах, что расширяет традиционные представления о корковом начале пирамидного пути. Помимо обычных (стимулирующих) в пирамидной системе обнаружены и корковые зоны, раздражение которых приводит к прекращению уже начавшихся движений.
Аксоны
клеток Беца, покинув кору, через внутреннюю
капсулу спускаются
в ножки мозга, варолиев мост, продолговатый
мозг, где на его передней
поверхности образуют два выпуклых
валика (пирамиды), в
нижней
части которых производят неполный
перекрест. Перекрещенная часть волокон
попадает в боковые столбы спинного
мозга, а неперекрещенная
- в передние.И те и другие выходят к
мышцам через передние
рога спинного мозга. Неперекрещенная
часть обслуживает дыхательную
мускулатуру, а также мышцы в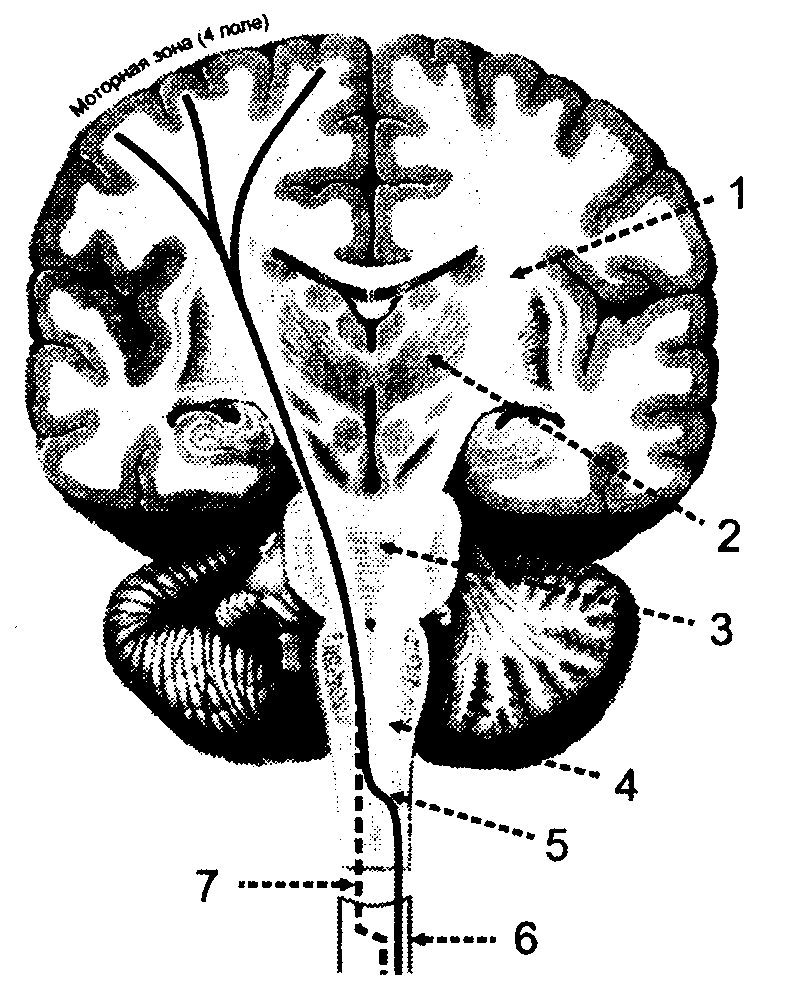 ерхней
части лица, жевательные
и голосовые связки. Перекрещенная - весь
остальной двигательный
аппарат (рис. 5).
ерхней
части лица, жевательные
и голосовые связки. Перекрещенная - весь
остальной двигательный
аппарат (рис. 5).
Рис 5 Схема пирамидного пути. ►
1. внутренняя капсула;
2. таламус;
3. варолиев мост;
4. пирамиды
5.перекрест пирамид:
6. спинной мозг;
7. неперекрещенная часть волокон;
Пирамидная система участвует в организации преимущественно точных, дискретных, дозированных, пространственно-ориентированных движений, в подавлении мышечного тонуса и полностью подчинена произвольному контролю. Раздражение моторных зон вызывает комплексные движения контралатеральных рук и ног, а при усилении раздражения вовлекаются и ипсилатеральные (находящиеся на той же стороне) конечности. Стимуляция нижних отделов прецентральной области вблизи височной доли вызывает, как правило, двухсторонние движения в виде чмокания, жевания или глотания. Влияния пирамидной системы больше выражеиы по отношению к мышцам верхней части туловища и верхних конечностей, чем к мышцам нижних конечностей. Эта неравномерность воздействий отражена в самом устройстве пирамидного пути: значительно большее количество кортико-спинальных волокон проходит в шейной и грудной областях спинного мозга по сравнению с пояснично-крестцовой областью.
При перерезке волокон пирамидной системы исчезает точность и координированность моторики, в движения начинают вовлекаться большие группы мышц, их исполнение становится «детским». Выпадение функций пирамидного пути проявляется в невозможности произвольных движений. Наибольшую роль в их реализации играют дистальные концы конечностей, особенно верхних, где индивидуализация движений наиболее значительна.
Независимо от того, на каком уровне повреждается связь между передней центральной извилиной и «обслуживаемой» мышцей, последняя перестает сокращаться и наступает ее парез (ослабление) или паралич на стороне тела, противоположной очагу поражения. Однако характер паралича оказывается различным в зависимости от локализации повреждения. Повышение мышечного тонуса - основной признак центрального паралича, получившего название спастического. Периферические поражения вызывают вялый атонический паралич. Полное одностороннее выпадение движений руки и ноги (гемиппегия) появляется при обширных очагах, затрагивающих переднюю центральную извилину.
Обратные связи. Для функциональной системы регуляции движений недостаточно лишь наличия программирующих и управляющих нервных центров. Характерной особенностью подобных систем регуляции является наличие обратной афферентации, или так называемой обратной связи, от рабочего органа к регулирующим нервным центрам. Осведомление центральной нервной системы о деятельности, вызванной на периферии ее управляющими импульсами, происходит при помощи афферентных сигналов, отправляемых органами зрения проприорецепторами мышечной суставного аппарата и другими рецепторами.
Таким образом, с помощью обратных связей производится оценка выполненных движений, определяется их эффективность.
Аппараты сравнения. Эти нервные аппараты, получая обратную сигнализацию, сличают заданную программу с реальными результатами ее выполнения (П. К. Анохин, Н. А. Бернштейн и др.). Имеются данные, что такие аппараты находятся в лобных долях, подкорковых ядрах (хвостатые тел1. и других образованиях.
Если есть расхождения фактического и требуемого действия, то в аппаратах сравнения возникают сигналы об ошибках – так называемые импульсы рассогласования. Соответственно этим импульсам в систему, управляющую движением, вносятся необходимые поправки – коррекции. В результате этого в процессе выполнения движения можно сохранить его основные черты, целесообразность, несмотря на изменение условий его осуществления. Так, сохраняется, например, индивидуальный характер походки человека при различиях в обуви, грунте, скорости движения, положении центра тяжести и т.д.
Механизм кольцевого регулирования является более древним филогенетически и возникает раньше, в процессе индивидуального развития. Примерно к трем годам достаточное развитие получают зрительные обратные связи, осуществляющие текущий зрительно-моторный контроль, а с 5-б лет происходит переход к текущему контролю движений с участием проприоцептивных обратных связей. Этот механизм достигает значительного совершенства к 7-9-летнему возрасту, после чего начинается переход к формированию механизма центральных команд. К возрасту 10-11 лет повышение скорости произвольных движений обеспечивается достаточным развитием процессов предварительного программирования их пространственных и временных параметров. С этого возраста представлены оба механизма управления произвольными движениями, дальнейшее совершенствование которых продолжается вплоть до 17-19 лет.