

Лекция №2
.._
СТРОЕНИЕ И ФУНКЦИИ БИОМЕХАНИЧЕСКОЙ СИСТЕМЫ
ДВИГАТЕЛЬНОГОАППАРАТА
Движение человека и частей его тела подчиняется законам механики и в значительной мере зависят от того, каково строение его тела и каковы его свойства.
Особенности строения тела человека и его двигательного аппарата дают основание рассматривать тело в целом и его части как особые биомеханические системы.
Биомеханическая система-это объединение живых объектов (органов , тканей ), которые обладают общими особенностями в проявлении законов механического движения, управления ими, участия в этих движениях. С механической точки зрения опорно-двигательный аппарат-это управляемые био-кинематические цепи (звенья и их соединения), оснащенные группами мышц. Звенья тела характеризуются определенными размерами, массой, моментами инерции, они снабжены мышечными двигателями. Характерной чертой строения биомеханической системы является ее переменный характер. При движении изменяется число рабочих звньев.,степени их свободы, состав мышечных групп, их взаимодействие и др.
По своей природе биомеханическая система двигательного аппарата одновременно является: а) механизмом организации и передачи движения, б)источником энергии движения, в) системой управления.
вызывают их перемещение, изменяют траекторию их движения. При этом мышцы определяют движения костных рычагов, которые лишь придают жесткость конструкции , передавая Части тела человека , имеющие подвижные соединения . принято рассматривать
как звенья (рычаги), входящие в состав биокинематических пар и цепей. Эти звенья находятся под воздействием приложенных к ним сил (внешних и внутренних), которые усилия и движение на расстояние. В движениях проявляются особенности строения и механические свойства биосистемы.
Биомеханика изучает в опорно- двигательном аппарате те особенности строения и функции, которые имеют отношение к совершенствованию движений.,используя упрощенную модель тела человека – биомеханическую систему. Она обладает основными свойствами, существенными для осуществления двигательной функции, но не включает в себя множество частных деталей
1. Соединения звеньев тела. .
Биокинематические пары и цепи.
Два соседних звена , соединенные подвижно, образуюут биокинематическую пару. Пары , в свою очередь, объединены в биокинематческие цепи.
Биокинематическая папра-это подвижное соединение двух звеньев, в котором возможности движений определяются его строением и управляющим воздействием мышц.
В анатомическом смысле- это два смежных звена тела, соединенных суставом
Способ соединения накладывает ограничения (связи ) на относительное движение (степени связи) . Наличие подвижности в соединениях предоставляет звеньям определенные возможности относительного движения. (степени свободы движения).
Различают связи: а) геометрические ( постоянные препятствия перемещению в каком –либо направлении) и б) кинематические ( ограничения в скорости перемещения, например, мышцей – антогонистом). Постоянные связи определяют сколько как максимум и каких остается степеней свободы движений.
Кинематические пары бывают: а )поступательные- одно звено может перемещаться поступательно по отношению к другому (например, боковые движения нижней челюсти).
б) вращательные-повороты звеньев в цилиндрических и шаровых суставах;
в) винтовые с сочетанием поступательного и вращательного движений.( например, в голеностопном суставе).
Соединения, допускающие поворот звеньев пары, называются шарнирами.
В целом, при одной степени свободы движений в суставе взаимное расположение этих звеньев определяется суставным углом. Если в суставе две или три степени свободы движений-то эйлеровыми углами. Следует подчеркнуть, что почти все биокинематические пары вращательные.
Биоукинематические цепи-это системно связанная совокупность биокинематических пар, последовательное или разветвленное соединение ряда кинематических пар. Кинематическую цепь, в которой конечное звено свободно, называют незамкнутой; цепь, в которой нет свободного звена,- замкнутой
В каждом соединении незамкнутой цепи возможны изолированные движения. Они геометрически независимы от движений в других соединениях ( если не учитывать взаимодействия мышц). В замкнутой или замкнувшейся цепи невозможно одиночное изолированное движение,суставные углы и скорости их изменения взаимосвязаны. Из этого следует, что в замкнутых цепях возможностей движений меньше , но управление ими точнее и проще. ( рис. 1)
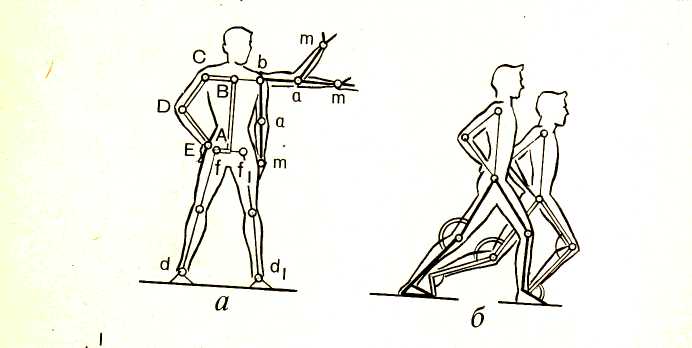
а) виды цепей: bam-незамкнутые, ABCDE-замкнутые на себя ; .
. .
Степени свободы движений.
Число степеней свободы движений соответствует количеству возможных независимых
линейных и угловых перемещений.
Тело, ничем не ограниченное в движении, называется свободным . Движение свободного тела возможно в трех основных направлениях- вдоль осей координат, а также вращение вокруг этих трех осей, т. е. тело имеет 6 степеней свободы движения .
Наложение связей уменьшает количество степеней свободы. Если закрепить одну точку тела, то сразу снимается 3 степени свободы- у тела остается возможность вращения вокруг трех осей. Так соединены кости трехосных суставов.(шаровидных). При закреплении двух точек в теле возможно вращение вокруг линии (оси) , проходящей через обе точки. Так соединены кости одноосных суставов. В преобладающей части суставов тела человека 2 или3 степени свободы, из чего следует , что в движениях в неодноосных суставах отсутствует определенность, задаваемая способом соединения..
Управление движениями звеньев сводится к ограничению избыточных степеней свободы
Для выполнения определенного движения требуется решить задачи: а) выбора необходимой траектории, б) управления движением по траектории( направлением и величиной скорости) и в) регуляции движения , понимаемой как борьба с помехами , сбивающими с траектории.
Геометрия движений
В суставном движении различают ось, плоскость, и размах. Все пары звеньев связаны в суставах неразрывно, как в шарнирах, поэтому они могут двигаться в основном только вокруг осей Число основных осей сустава соответствует количеству степеней свободы движений одного звена относительно другого. Геометрические оси вращения не постоянны и следует говорить о мгновенных осях вращения. Плоскость движения перпендикулярна оси вращения и характеризует направление перемещения звена. Размах движений – это угловое перемещение звена из одного крайнего положения в другое. Размахом движений измеряется подвижность в каждом суставе. Общий размах движения в целом бывает меньше суммы размахов изолированных движений.в суставах
Звенья тела как рычаги и маятники.
Скелет, составленный из подвижно соединенных костей, представляет собой твердую основу биокинематических цепей. Звенья цепей с приложенными к ним силами (внутренними и внешними )рассматриваются как система составных рычагов.
Рычаг- это твердое тело, которое тело, которое может под действием приложенных сил вращаться вокруг оси (опоры)в двух противоположных направлениях, а также сохранять свое положение.
Как простейший механизм, рычаг служит для передачи движениям силы на расстояние.
Каждый рычаг имеет точку опоры — ось рычага (О на рис. 2), точки приложения двух взаимно противодействующих сил (G и Q). Чтобы определить расстояние до места приложения сил от оси рычага, измеряют плечи рычага (ОА и ОВ). Чтобы определить расстояния до направления действия сил от оси рычага, измеряют плечи сил (d — перпендикуляры, опущенные из точки О на линии действия сил, т. е. их направления).
Рычаги бывают одноплечие( с точкой опоры на конце рычага) и двуплечие ( с точкой опоры между концами рычага).
Мерой действия силы на рычаг служит ее момент относительно точки опоры
(произведение силы на ее плечо)
Звенья тела человека имеют в своей основе костные рычаги Двуплечие рычаги используются , например, при сохранении положения стоя, а одноплечие- в быстрых движениях конечностей (см. рис 3)..
Условия сохранения положения звеньев и их движения как рычагов.
Моментом силы М относительно оси вращения называется произведение величины силы на ее плечо:
Момент силы берется со знаком «+», если сила стремится повернуть тело против часовой стрелке и со знаком «-« в противном случае. Момент силы количественно характеризует вращательное действие силы.
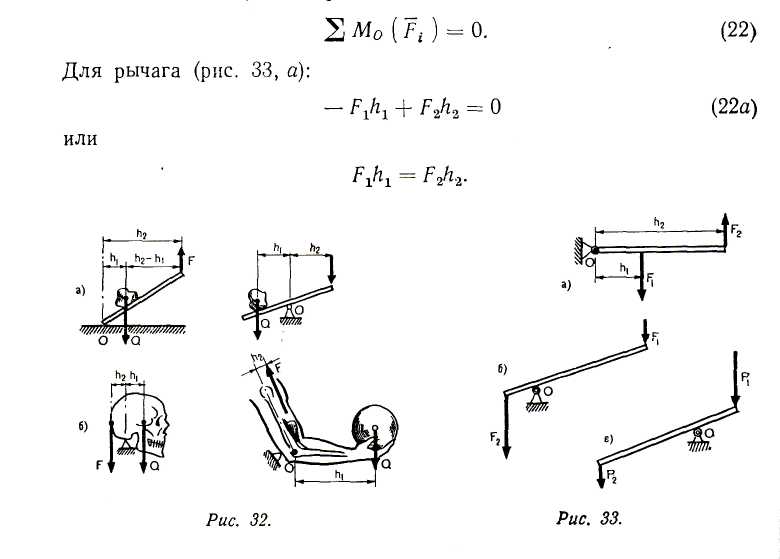
Для равновесия рычага необходимо равенство моментов приложенных сил относительно оси рычага ::рычаг будет находиться в равновесии , когда алгебраическая сумма моментов всех действующих на него сил относительно его неподвижной точки О равна нулю:
Подбирая соотношения плеч , можно изменять соотношение сил. Рычаги, показанные на рис 2 и 3 иллюстрируют эту закономерность
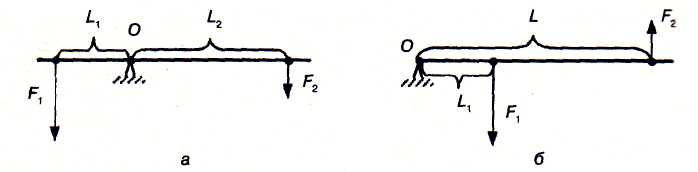
Рис. 2 Равновесие рычагов 1-го (а) и 2-го (б) рода

Когда момент одной из сил больше момента ругой , возникает ускорение в ту сторону., куда направлена сила большего момента.
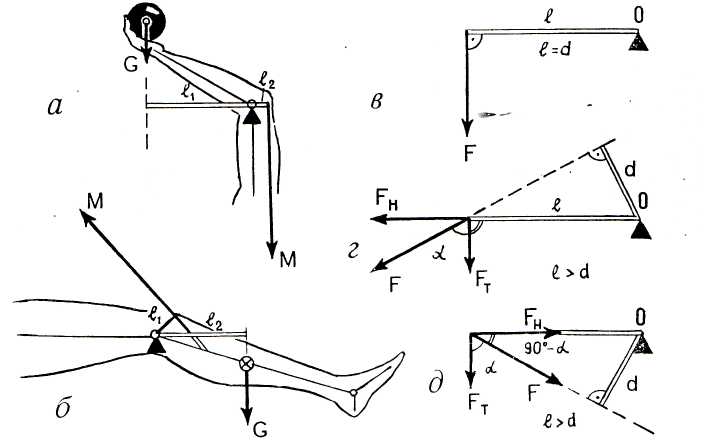
Рис. 3 .Костные рычаги.
а)-двуплечий; б)-одноплечий; в- врашающая сотавляющая F и укрепляющая F
при различных углах ее приложения.
Следует подчеркнуть, что в реальных движениях изменяются положения костных рычагов и углы приложения сил . Следовательно, изменяются плечи сил. Длина мышц тоже не остается постоянной. Все это делает задачу управления движениями сложной проблемой.
Золотое правило механики в движениях человека.
Работа, совершаемая силою , приложенной на одном плече рычага ,передается на другое.
Сила тяги мышцы, приложенная на коротком плече рычага, вызывает во столько раз большее смещение другого плеча, во сколько раз первое плечо короче второго (выигрыш в пути) . Так как разные пути проходятся за одно и то же время, имеет место также и выигрыш в скорости .При этом сила, передаваемая на длинное плечо рычага ,ровно во столько же раз меньше , чем приложенная.. Следовательно, выигрыш в скорости достигается за счет проигрыша в силе.
Почти все мышцы в теле человека прикрепляются вблизи суставов (короткое плечо рычага); это приводит к выигрышу в пути (а, следовательно, и в скорости) при проигрыше в силе. При большей части положений костного рычага мышечные тяги направлены под острым или тупым углом к звену (вдоль звена), что влечет невосполнимые потери в силе мышц (уменьшается вращающая тяга). Нормальная же (скрытая) тяга в этом случае способствует укреплению сустава, через который мышца переходит.
При больших нагрузках напрягаются все мышцы, окружающие сустав, в том числе и антагонисты. При этом резко возрастают потери в суммарной тяге мышц; в то же время достигается и положительный эффект—укрепление нагруженного сустава.
В связи с особенностями приложения мышечных тяг к костным рычагам необходимы весьма значительные напряжения мышц для выполнения не только силовых, но и скоростных движений.
Входящие в биокинематические цепи звенья тела образуют системы составных рычагов, в которых «золотое правило» механики проявляется намного сложнее, чем в простых одиночных рычагах.
ЛИТЕРАТУРА
Попов Г.И. Биомеханика : Учебник для студ. высш. учеб. заведений.-М.:
Изд. центр «Академия», 2005.- 256 с.
Донской Д.Д.,Зациорский В.М. Биомеханика : Учебник для институтов физической культуры .- М: « Физкультура и спорт» ,1979 ,-264 с.
Дубровский В.И.,Федорова В.Н. Биомеханика : Учебник для сред. и высш.учебн. заведений.-М.: Изд-во ВЛАДОС-ПРЕСС,2003,- 672 с.
Холодов Ж.К.,Кузнецов В.С. Теория и методика физического воспитания и спорта.:
Учеб. пособие для студ. высш. учеб. заведений .-3-е изд.. стр.-М.: Изд. центр «Академия», 2004- ;480 с.
Солодков А.С. ,Сологуб Е.Б. Физиология человека.Общая. Спортивная. Возрастная: Учебник, Изд. 2-е ,испр. и доп..-М.: Олимпия Пресс,2005 ,-528 с.
Макарова Г.А. Спортивная медицина : Учебник. – 2-е изд ,стереотип. – М.: Советский спорт,2006, -480с.
Граевская Н.Д., Долматова Т.И. Спортивная медицина: Курс секций и практические занятии.Учебное пособие.-М.: Советский спорт, 2004.- 304 с.
БИОМЕХАНИКА.
Лекция № 1