

Кинематика станка модели за252
Движение резания. Шлифовальный круг (рис. 61) приводится в движение электродвигателем мощностью 4,5 кВт через повышающую плоскоременную передачу со сменными шкивами.
К станку прилагаются сменные шкивы диаметром 65, 95, 120 и 225 мм.
Движения подач. Шпиндель III с обрабатываемой деталью приводится в движение двухскоростным электродвигателем мощностью 1,2 кВт через плоскоременную передачу 90—160, клиноременный вариатор с раздвижными конусами, вал II и клиноременную передачу 100—188 с натяжным роликом.
Продольная подача стола осуществляется гидроприводом, состоящим из шестеренного насоса Н, пилота П1 реверсивного золотника З, панели автоматики и рабочего цилиндра Ц1 поршень которого посредством штока соединен со столом станка.
Насос Н производительностью 50 л/мин нагнетает масло из бака в напорную магистраль, направляя его к пилоту П1 гидропанели и к пилоту П2 гидрозажима детали.
При указанном на схеме положении пилота П1 небольшая часть масла направляется, в цилиндр Ц2 блокировки механизма ручного перемещения стола для вывода из зацепления реечного колеса 15 с рейкой т=3 мм, что обеспечивает выключение цени ручного перемещения стола.
Основной поток масла от пилота П1, поступает в реверсивный золотник З и через его правую выточку направляется в правую полость рабочего цилиндра Ц1, перемещая поршень со столом влево. Из левой полости рабочего цилиндра через среднюю выточку золотника З масло вытесняется в панель автоматики и через дроссель Дч, настроенный на требуемую скорость хода стола при черновом шлифовании, сливается в бак.
При подходе стола к левому крайнему положению переставной упор У2 поворачивает рычаг Р, который перемещает реверсивный золотник З влево. При этом масло от пилота П1 через левую выточку золотника З поступает в левую полость рабочего цилиндра Ц1, смещая поршень со столом вправо. Масло из правой полости цилиндра Ц1 сливается в бак через выточку золотника З и панель автоматики.
Длина хода стола настраивается упорами У1 и У2. Поперечная периодическая подача шлифовальной бабки, в процессе шлифования осуществляется посредством соленоида Сд в момент начала хода стола влево. Соленоид Сд приводит в движение храповой механизм, поворачивающий храповое колесо 200. Храповое колесо связано с корпусом К, внутри которого расположена планетарная передача. При повороте храпового колеса с корпусом поворачивается эксцентричный валик VIII, на котором свободно расположен блок сателлитов 23, 22. Сателлит 23 обкатывает неподвижную солнечную шестерню 23, втулка которой наглухо закреплена в столе. Сателлит 22 находится в зацеплении с колесом 24, закрепленным на ходовом винте VII, который связан с маточной гайкой шлифовальной бабки. Гайка Г и пружина П служат для устранения зазора в винтовой передаче.
Величина поперечной подачи sп за ход стола определяется по выражению
sп = Z iпл3 мм/ход
200
где z — число зубьев поворота храпового колеса.
Передаточное отношение планетарного механизма iпл по формуле Виллиса равно
iпл = 1 23×22 = 1/12
23×24
тогда минимальная поперечная подача sn при повороте храпового колеса на одни зуб определяется выражением
sn min = 1 × 1 3=0,00125 мм
200×12
Вспомогательные движения. Ручное поперечное перемещение шлифовальной бабки осуществляется поворотом маховичка Мх2, закрепленного на корпусе К. При выключенном планетарном механизме замыкатель Зл заходит во впадину колеса 24, связывая корпус К с ходовым винтом VII. Вывод сателлитов 23 и 22 из зацепления с колесами 23 и 24 производится поворотом грибка Гр на 180°.
Ручное продольное перемещение достигается поворотом маховичка Мх1. Движение передается через шестерни 18—53, вал IX, шестерни 18—53, вал X и реечную шестерню 15, входящую в зацепление с рейкой т=3 мм, прикрепленной к столу.
Возможность осуществления ручного продольного перемещения стола определяется положением поршня в цилиндре Ц2. Когда включена продольная подача от гидропривода, поршень цилиндра Ц2 смещается вниз и выводит из зацепления реечную шестерню 15 с рейкой. При выключении гидравлической продольной подачи, когда давление в цилиндре Ц2 падает, поршень под действием пружины Па перемещается вверх, вводя в зацепление шестерню 15 с рейкой.
Закрепление обрабатываемой детали осуществляется гидрозажимом, поршень которого тягой соединен с зажимным устройством патрона. При указанном на схеме положении пилота П2 масло от насоса Н поступает в правую полость цилиндра Ц3, осуществляя зажим детали.
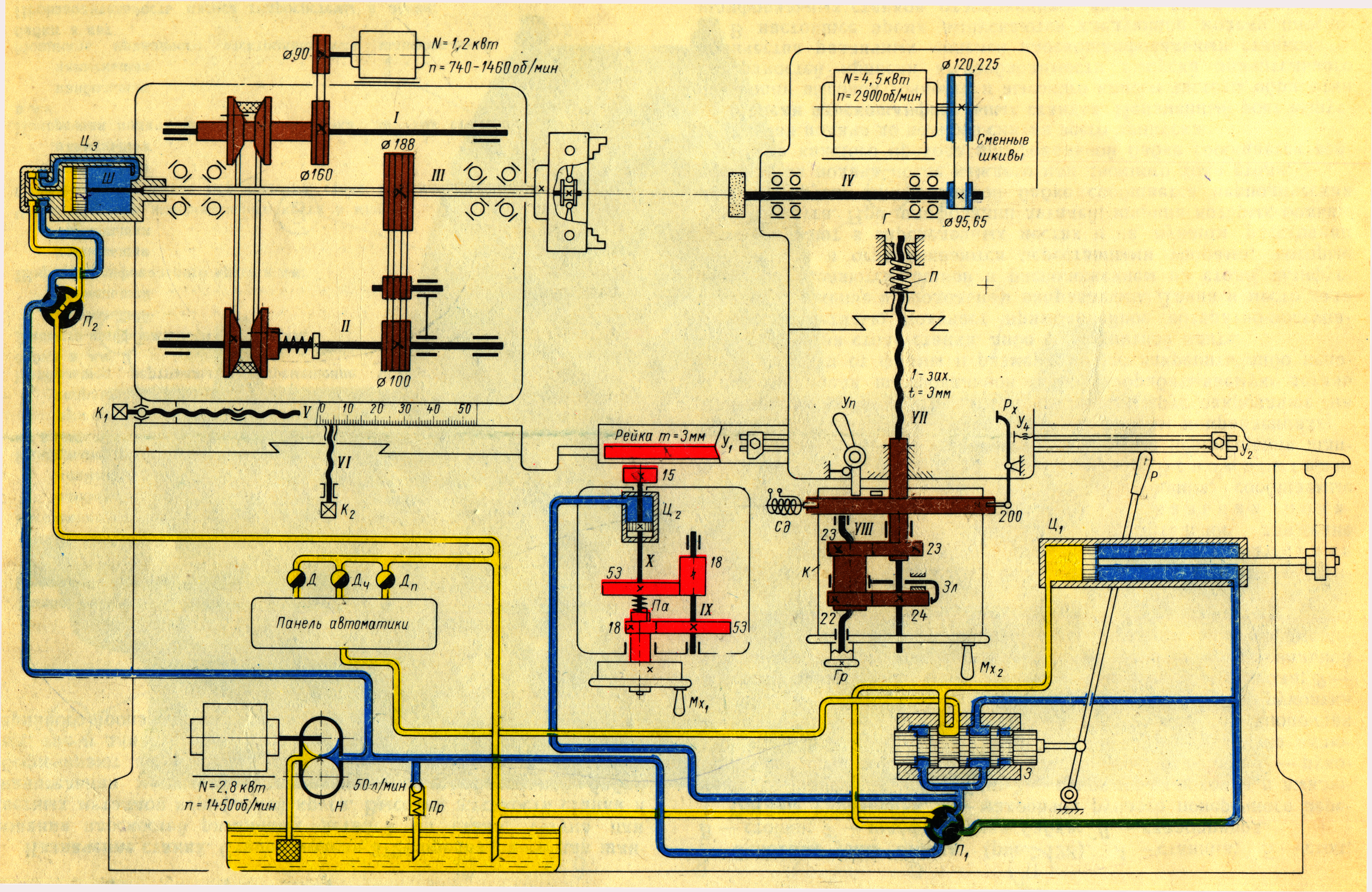
Рис. … Кинематическая схема внутришлифовального станка модели 3А252