

Электровозы переменного тока
Рассмотрим схему вспомогательных цепей восьмиосного электровоза переменного тока на примере секции электровоза ВЛ80р (рис. 80).
Рис. 80. Принципиальная схема высоковольтных вспомогательных цепей секции электровоза ВЛ80р
Расщепитель фаз ФР присоединен параллельно к шинам XI Х2, ХЗ. Шины XI и Х2 подключены к обмотке собственных нужд трансформатора, рассчитанной на 400 В. Пуск расщепителя фаз, как уже было сказано, осуществляется с помощью пускового резистора R. Потребителями трехфазного тока являются асинхронные электродвигатели с короткозамкнутым ротором: МВ1, МВ2 — вентиляторов охлаждения тяговых двигателей; МВЗ, МВ4 — спаренных вентиляторов охлаждения выпрямительно-инверторных преобразователей, сглаживающих реакторов, радиаторов тягового трансформатора; МВ5 —вентилятора охлаждения блока стабилизирующих резисторов и выпрямительной установки возбуждения; МК — компрессора; МН — масляного насоса системы охлаждения трансформатора. Перечисленные асинхронные двигатели включаются соответствующими контакторами; при этом включаются конденсаторы между линейной и генераторной фазами двигателя (кроме электродвигателя МН), что облегчает запуск и условия работы двигателей, так как улучшается симметрия трехфазной системы. Электродвигатель вентилятора МВ5 включается только в режиме рекуперативного торможения. Отметим, что на электровозах ВЛ80 других модификаций установлено по четыре двигателя для вентиляции силового оборудования каждой секции. Охлаждение оборудования, используемого в режиме торможения, осуществляется спаренными вентиляторами. Все двигатели защищены от перегрузок и коротких замыканий тепловыми реле. От обмотки собственных нужд получают питание печи для обогрева кабины машиниста, обогреватели санузла, нагреватели калорифера обдува лобовых стекол кабины. В исключительных случаях допускается снижение напряжения в контактной сети до 19 000 В. Для того чтобы по-прежнему к вспомогательным машинам подводилось напряжение 400 В, с помощью переключателя Я их подключают к выводу 0 обмотки собственных нужд трансформатора. Вольтметры, включенные во вспомогательные цепи (см. рис. 79 и 80), отградуированы по напряжению контактной сети.
Непосредственное и косвенное управление. Контроллеры машиниста
Машинисту приходится управлять электровозом, на котором установлены тяговые двигатели суммарной мощностью несколько тысяч киловатт. Кроме того, на электровозе имеются различные вспомогательные машины, электрические аппараты, тормоза, которые также нужно приводить в действие или выводить из работы. Наряду с этим машинист обязан следить за показаниями путевых сигналов, состоянием пути, контактной сети, заботиться о том, чтобы не боксовали колесные пары, не происходило резких перепадов силы тяги. После пуска и разгона состава машинисту необходимо контролировать скорость движения и приводить ее в соответствие с разрешенной на данном участке. Очень внимательным должен быть машинист в момент перехода на электрическое торможение, так как может возникнуть круговой огонь на коллекторе из-за сильных бросков тока. Кроме того, в процессе электрического торможения возможен юз (заклинивание) колесных пар. Если его быстро не устранить, появляются ползуны на бандажах колес и бандажи приходится преждевременно обтачивать. Для облегчения работы машиниста созданы системы управления различными устройствами электровоза. В первую очередь остановимся на системе управления силовой цепью. Эта система должна обеспечивать строгую последовательность включения и выключения индивидуальных контакторов, контакторов групповых переключателей и других аппаратов в течение небольшого времени, которое затрачивается на их переключение. В зависимости от способа переключений электрических аппаратов в силовой цепи электровоза различают системы непосредственного и косвенного управления.
При системе непосредственного управления (рис. 81) электрические аппараты, включенные в силовую цепь, приводятся в действие непосредственно контроллером машиниста.
Рис.81. Система включения контроллера машиниста при непосредственном управлении тяговыми двигателями
В простейшем случае контроллер имеет барабан из изоляционного материала. На барабане укреплены медные сегменты и неподвижные контактные пальцы, к которым подведены провода от разных участков схемы. В зависимости от положения (позиции) рукоятки контроллера и конфигурации сегментов барабана они замыкают те или иные контактные пальцы, которые включают или выключают секции пускового реостата и осуществляют другие переключения, изменяющие режим работы тяговых двигателей. Каждая позиция рукоятки контроллера фиксируется специальным механизмом. На нулевой позиции все контакты разомкнуты и тяговые двигатели отключены от контактного провода. Когда машинист ставит рукоятку контроллера на 1-ю позицию, сегмент барабана замыкает два верхних пальца; при этом образуется следующая цепь тока: токоприемник, пусковой реостат, тяговый двигатель. На 2-й позиции происходит электрический контакт между сегментом и третьим пальцем, в результате чего часть пускового реостата выводится из цепи и частота вращения двигателя увеличивается. На 3-й позиции замкнуты все четыре пальца и реостат полностью выведен из цепи. Система непосредственного управления может быть применена только при двигателях небольшой мощности и сравнительно невысоком напряжении в контактной сети. Объясняется это следующим. Когда мощность двигателей значительна, в момент разрыва цепи тока будет возникать электрическая дуга, погасить которую при такой системе переключений трудно. К контроллеру подводится полное напряжение контактной сети, что создает опасность для обслуживающего персонала. Кроме того, чтобы обеспечить достаточную электрическую прочность изоляции, контроллер пришлось бы делать очень больших размеров. Поэтому на электровозах система непосредственного управления не применяется.
В системе косвенного управления (рис. 82) аппараты силовой цепи приводятся в действие электропневматическим, электромагнитным или электродвигательным приводом. Машинист, осуществляя переключения в цепи управления, включает или выключает эти приводы.
Рис. 82. Схема включения контроллера машиниста при косвенном управлении тяговыми двигателями
Как и в системе с непосредственным управлением, основным аппаратом цепи управления является контроллер машиниста. Однако здесь этот аппарат производит переключения не непосредственно в силовой цепи, работающей под высоким напряжением и с большими токовыми нагрузками, а в низковольтной цепи управления. Машинист, поворачивая рукоятку контроллера, подключает провода цепи управления к источнику электрической энергии в строго определенной последовательности. При этом срабатывают соответствующие аппараты силовой цепи и их контакты замыкаются либо размыкаются. На 1-й позиции сегмент барабана контроллера замыкает цепь управления, в которую включена катушка электропневматического привода контактора 1 (это положение показано на рис. 82). Контактор включается и замыкает цепь тяговых двигателей. Пусковой реостат полностью вводится в силовую цепь. На 2-й позиции контроллера замыкается контактор 2 и часть пускового реостата отключается. На 3-й позиции включается контактор 3. Реостат полностью выводится из цепи, и двигатели работают на ходовой безреостатной характеристике. На современных электровозах машинист с помощью контроллера осуществляет пуск тяговых двигателей, переключает их с одного соединения на другое, производит ослабление возбуждения, изменяет направление движения электровоза, переключает двигатели в генераторный режим. Несмотря на многочисленность функций контроллера, для простоты управления его стремятся выполнить с минимальным числом рукояток.
Рис. 83. Контроллер машиниста электровоза постоянного тока
Контроллер машиниста, например, электровоза постоянного тока (рис. 83) имеет рукоятки — главную, реверсивную и для управления ослаблением возбуждения. На электровозах с электрическим торможением (рекуперативным) рукоятка ослабления возбуждения используется и как тормозная — для регулирования тока рекуперации. Кроме того, в этом случае добавляется еще одна рукоятка — реверсивно-селективная, необходимая для переключения двигателей, работающих в генераторном режиме, с одного вида соединения на другой. Каждая рукоятка снабжена устройством, фиксирующим ее в различных положениях (позициях). Рукоятки контроллера располагают так, чтобы машинисту было удобно ими пользоваться. Специальные механические блокировки не допускают ошибочных перемещений рукояток в процессе управления электровозом. Например, главную рукоятку нельзя перевести, если реверсивная находится в нейтральном (нерабочем) положении, и наоборот, машинист не может повернуть реверсивную рукоятку, пока главная находится не в нулевом положении. Благодаря этому исключается возможность случайного реверсирования тяговых двигателей под нагрузкой. Реверсивную рукоятку делают съемной, ее можно вынуть, только когда остальные рукоятки находятся в нулевом (исходном) положении. На электровоз выдается одна реверсивная рукоятка. Поэтому машинист при переходе из одной кабины управления в другую обязательно ставит все рукоятки в нулевое положение. Рукоятку ослабления возбуждения можно перевести из положения Полное возбуждение в одно из положений Ослабленное возбуждение только тогда, когда главная рукоятка занимает положение, соответствующее какой-либо ходовой позиции.
На современных электровозах устанавливают контроллеры кулачкового типа. Когда машинист переводит главную рукоятку контроллера с одной позиции на другую, поворачивается связанный с ней главный кулачковый вал. На вал насажен ряд фасонных дисков (кулачковых шайб) с впадинами и выступами (рис. 84).

Рис. 84. Главный кулачковый вал контроллера машиниста
Против каждой шайбы на стойках укреплены подвижные и неподвижные контакты (контакторные элементы), к которым присоединены провода цепей управления.
Рис. 85 Схема контакторного элемента в разомкнутом (а) и замкнутом (б) положениях
Если выступ диска касается ролика, то контакты разомкнуты (рис. 85, а). Как только впадина диска подойдет к ролику, он провалится в нее и под действием пружины контакты замкнутся (рис. 85, б). Это значит, что замкнется цепь, в которую включен контакторный элемент, и соответствующий аппарат сработает. Следовательно, очередность замыкания и размыкания проводов цепи управления и, как результат, очередность переключения аппаратов силовой цепи зависят от взаимного расположения впадин и выступов кулачковых шайб контроллера.
ЭЛЕКТРИЧЕСКИЕ БЛОКИРОВКИ
Электрические аппараты силовой цепи должны включаться и выключаться в строго установленной последовательности. Для обеспечения требуемой очередности действия этих аппаратов большинство из них снабжено специальными блокировочными контактами (блок-контактами), иначе говоря, блокировками,включенными в цепи управления. Эти блокировки связаны с механизмом, приводящим в действие тот или иной аппарат. Они замыкаются или размыкаются одновременно с главными контактами аппарата (либо с небольшим опозданием или опережением), производя необходимые переключения в цепи управления. Применяют два вида блок-контактов: замыкающие и размыкающие. При замыкающем блок-контакте блокируемая цепь разорвана, когда аппарат занимает нормальное положение, т. е. в цепи управления им нет тока, и замкнута при прохождении тока по цепи управления. Размыкающий блок-контакт разрывает блокируемую цепь, когда по цепи управления проходит ток, и наоборот, замыкает ее при нормальном положении аппарата. Что принимают за нормальное положение аппаратов, было сказано выше. Чтобы можно было определить, какому аппарату принадлежит тот или иной блок-контакт, около графического обозначения блок-контакта указывают номер аппарата, присвоенный ему в силовой схеме, или его буквенное обозначение. В соответствии со стандартами ЕСКД блок-контакты электрических аппаратов имеют те же обозначения, что и их главные контакты. Поясним на примерах, как с помощью блок-контактов обеспечивают заданную последовательность действия аппаратов (рис. 86).

Рис. 86. Пример включения блокировок в цепь управления
Допустим, что для нормальной работы электровоза необходимо выдержать три условия:
первое — контактор 1 может замыкать свои контакты на 1-й позиции только тогда, когда групповой переключатель находится в положении, соответствующем последовательному соединению двигателей. Для обеспечения такой зависимости в цепь катушки 1 электромагнитного вентиля контактора включен блок-контакт группового переключателя, замыкающийся при положении аппарата, соответствующем последовательному соединению тяговых двигателей. На схемах электрических цепей электровозов такой блок-контакт обозначается КСП-С;
второе — контактор 2 должен включаться на 1-й позиции контроллера только после того, как включится контактор 1. Для этого в цепь катушки 2 электромагнитного вентиля контактора введен замыкающий блок-контакт контактора 1;
третье — контактор 3 должен включиться на 2-й позиции контроллера только после того, как выключится контактор 1. Выполнение этого требования обеспечивается тем, что в цепь катушки 3 включен размыкающий блок контакт 1 контактора 1, который замкнут, когда этот контактор отключен.
Перечисленные условия могут быть дополнены и другими, например таким. Из второго условия следует, что, как только контактор 1 на 2-й позиции отключится, его блок-контакты 1 в цепи катушки контактора 2 разомкнутся и контактор 2 тоже выключится. Если в соответствии с условиями работы электровоза этого нельзя допустить, то замыкающий блок-контакт 1 в цепи катушки контактора 2 шунтируют так называемым блок-контактом независимости 2. Этот блок-контакт нормально разомкнут, но как только контактор 2 включится, блок-контакт 2 замкнется и шунтирует блок-контакт 1. Таким образом, в дальнейшем контактор 2 будет включен независимо от того, включен или выключен контактор 1. В качестве примера конструктивного выполнения рассмотрим блокировочное устройство, показанное на рис. 87.
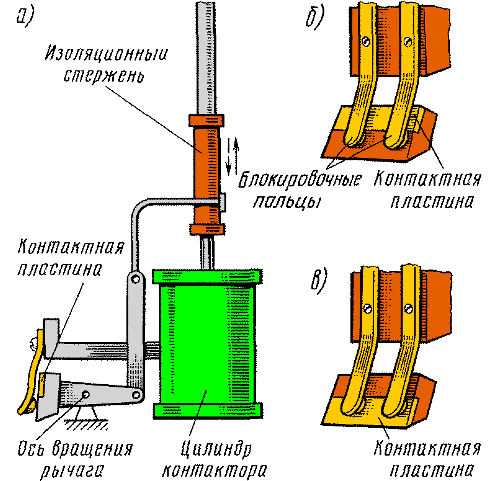
Рис.87. Блокировочное устройство индивидуального контактора
При впуске сжатого воздуха в цилиндр контактора (рис. 87, а) изоляционный стержень поднимается вверх. Колодка, соединенная рычагом и тягой с этим стержнем, поворачивается вокруг оси рычага. Медная контактная пластина, укрепленная на колодке, замыкает блокировочные пальцы. На рис. 87, б показан блок-контакт замыкающий. В размыкающем блок-контакте контактная пластина расположена так, как изображено на рис. 87, в.
СХЕМА ЦЕПИ УПРАВЛЕНИЯ ЭЛЕКТРОВОЗА ПОСТОЯННОГО ТОКА
Электрические цепи управления электровозов можно разделить на две части: цепи управления тяговыми двигателями и вспомогательные цепи управления. К вспомогательным относятся цепи управления токоприемниками, быстродействующими выключателями, вспомогательными машинами, песочницами, освещением, звуковыми сигналами и другим электрооборудованием. Совместная схема цепей управления тяговыми двигателями и вспомогательных цепей занимает много места и дается в виде вклеек в учебниках и руководствах по эксплуатации электровозов, прилагаемых заводами-изготовителями. Мы рассмотрим схемы цепей управления тяговыми двигателями, электровозов постоянного тока, представленные в сравнительно упрощенном виде. Эти схемы довольно сложны, так как в них введены многочисленные блокировки, обеспечивающие те или иные зависимости. Их, как и схемы силовых цепей, выполняют строчным способом. Как пример на рис. 88 показана упрощенная схема цепей управления тяговыми двигателями электровоза ВЛ10.
Рис.88 Упрощенная схема цепей управления восьмиосного электровоза постоянного тока с рекуперацией
Как и в силовых схемах, в схемах цепей управления используются буквенные и цифровые обозначения. Все горизонтальные строки схемы цепей управления нумеруют. Так, для схемы, изображенной на рис. 88, строки имеют номера с 0 по 47. Некоторые строки имеют буквенно-цифровые обозначения, например Б, К5, К37. Для упрощения на схеме изображены только те строки — линии связи, которые необходимы для рассмотрения принципа ее работы. Цепи управления питаются от генератора управления ГУ. Параллельно генератору включают аккумуляторную батарею, питающую эти цепи при опущенном токоприемнике, а также в случае неисправности генераторов. На отечественных электровозах применено однопроводное питание. Это значит, что один полюс генератора управления (обычно положительный) соединен проводами с аппаратами, а другой — с рамой кузова электровоза, к которой присоединены соответствующие выводы обмоток аппаратов. Такой способ соединения позволяет уменьшить число и длину проводов, упрощает монтаж. Для того чтобы можно было прочитать схему, необходимо увязать состояние ее элементов в данный момент с расположением выступов и впадин шайб контроллера, так как от этого зависит, в каком положении находятся контакты аппаратов — замкнуты они или разомкнуты. Обычно это делается так: каждую кулачковую шайбу (рис. 89, а) развертывают в плоскость (рис. 89, б) и делят ее вертикальными линиями на столько равных частей, сколько позиций имеет главная рукоятка.

Рис. 89. Пример развертки шайбы кулачкового вала контроллера
Замыкание или размыкание цепей проводов управления осуществляется следующим образом: при повороте рукоятки главного вала контроллера машиниста кулачковая шайба давит своим выступом на ролик и размыкает контакты в цепи управления. Как только выступ шайбы пройдет ролик, пружина повернет рычаг и снова замкнет контакты в цепи управления. На развертке замкнутое положение контакта показывают зачерненным прямоугольником. Если контакторный элемент остается включенным на нескольких соседних позициях контроллера, то показывают сплошную зачерненную линию. На рис. 89 показана одна из кулачковых шайб главного вала контроллера машиниста электровоза ВЛ10 (см. левую часть рис. 88). Когда контакт 13 цепи управления замкнут, провод 13 получает питание на позициях с 3-й по 23-ю, а также на 27-й и 37-й в соответствии с расположением кулачков на этой шайбе. Число горизонтальных линий на развертке главного вала соответствует числу кулачковых шайб, посаженных на вал. Главный вал имеет 23 кулачковые шайбы, это обеспечивает 37 позиций (не считая нулевой). Тормозной вал набран из 22 кулачковых шайб, что позволяет получить четыре позиции ослабления возбуждения и 16 позиций торможения. Реверсирование тяговых двигателей и выбор схемы их соединения в тормозном режиме обеспечиваются отдельной реверсивно-селективной рукояткой, а управляемые ею кулачковые шайбы располагаются на главном и тормозном валах. С правой стороны разверток валов показаны контакты контроллера машиниста (см. рис. 88). Номера линий одновременно являются и номерами этих контактов. Как было показано на примере кулачковой шайбы с контактом 13, они замыкаются и размыкаются в зависимости от положения рукояток того или иного вала. Изучая схему цепи управления, на каждой позиции контроллера машиниста рассматривают прохождение тока и определяют, какие аппараты при этом срабатывают в силовой цепи.
Проследим, например, что происходит в цепи управления, когда главная рукоятка контроллера машиниста переводится с нулевой позиции на 1-ю. Перед этим машинист должен поднять токоприемник, включить выключатель цепи управления ВУ, соединяющий цепи управления электровоза с генератором ГУ, пустить в ход вспомогательные машины, включить быстродействующий выключатель. Вспомогательные машины включают, чтобы создать компрессорами запас сжатого воздуха, необходимый для работы приводов аппаратов, обеспечить работу двигателей вентиляторов и генератора управления. Для включения быстродействующего выключателя машинист нажимает кнопку БВ, расположенную перед ним на кнопочном щите. При этом по проводу К50 напряжение подводится к кнопке Возврат БВ. При кратковременном нажатии на эту кнопку по контакторному элементу 47 контроллера машиниста (показанному также и на рис. 88) напряжение подается на катушку вентиля Возврат БВ и по проводу Н14 на катушку дифференциального реле 52-1. Дифференциальное реле замыкает свой контакт в цепи удерживающей катушки БВ: провод К85, замыкающий контакт дифференциального реле 52-1, блок-контакт тормозного переключателя ТК1-М, удерживающая катушка БВ, земля. После того как удерживающая катушка получит питание, замкнутся силовые контакты быстродействующего выключателя — аппарат будет включен. Сигнальная лампа Е438-1, расположенная на пульте управления в кабине машиниста, погаснет, поскольку блок-контакт 51-1 в проводе К62 при этом разомкнётся. Цепь катушки вентиля Возврат БВ проходит через контакторный элемент 47 контроллера машиниста, замкнутый только на нулевой позиции. Это не случайно. Если в процессе работы электровоза произойдет отключение быстродействующего выключателя вследствие короткого замыкания или токовых перегрузок в силовых цепях тяговых двигателей, то машинист может вновь включить его только при разомкнутой силовой цепи. Аварийная ситуация может возникнуть и в том случае, когда машинист после рабочего отключения этого выключателя включит его на промежуточной позиции. Скорость движения за время выбега, как правило, уменьшается (если нет крутых спусков). Тогда в момент включения тяговые двигатели будут иметь значительно меньшую э. д. с, чем прежде, а в цепь может быть введено слишком малое сопротивление реостата. В результате возникнет недопустимый бросок тока и сработает защита. После включения быстродействующего выключателя реверсивно-селективную рукоятку контроллера машиниста устанавливают в положение Вперед или Назад на позиции М, которая соответствует тяговому режиму (см. рис. 88). При этом замыкается контакторный элемент 3 реверсивно-селективного вала и катушки тормозных контакторов TKI-M и TKII-M получают питание, что приводит к установке их контакторов в силовой цепи и блок-контактов в цепи управления в положение, соответствующее этому режиму. В зависимости от положения реверсивно-селективной рукоятки подготавливаются следующие цепи управления. В положении Вперед замыкается контакторный элемент 1 и катушки Вп. 1 и Вп. 2 получают питание по проводу НПО от ГУ или аккумуляторной батареи, а их блок-контакты замыкаются (в таком положении они показаны на рис. 88); в положении Назад замыкается контакторный элемент 2 реверсивно-селективного вала и питание получают катушки Наз. 1 и Наз. 2 по тому же проводу НПО, замыкая свои блок-контакты. Далее напряжение от источника питания по проводам 1 или 2 подается через замкнутые в тяговом режиме блок-контакты TKI-M, ТКП-М и 51-1 (он замкнут при включенном быстродействующем выключателе) на катушки 3-1, 4-1, 3-2 линейных контакторов, но тока в цепи нет, поскольку разомкнут блок-контакт 4-1. Цепь замкнется только после того, как машинист переведет рукоятку главного вала на 1-ю позицию. При этом замыкается контакторный элемент 0 и по проводу К19 через замкнутые блок-контакты групповых переключателей КСПО-С, КСП1-С-СП, КСПП-С-СП и контакторный элемент Б тормозного вала рассматриваемая цепь будет соединена с землей. После возбуждения катушки линейного контактора 4-1 его блок-контакт замыкает цепь линейных контакторов в обход блок-контактов групповых переключателей. Такая последовательность включения линейных контакторов обеспечивает их включение только на 1-й позиции главного вала, т. е. контролируется окончательная установка всех аппаратов (в первую очередь групповых переключателей) в положение, соответствующее последовательному соединению тяговых двигателей. Кроме того, если бы главная рукоятка контроллера машиниста случайно была поставлена на 2-ю или более высокую позицию, когда часть пускового реостата шунтирована, то через якоря тяговых двигателей, которые еще не вращаются, пошел бы слишком большой ток. Поэтому на остальных позициях силовая цепь не может быть собрана.
После включения линейных контакторов на 1-й позиции главного вала контроллера машиниста создается цепь последовательно включенных тяговых двигателей с полностью введенным пусковым реостатом. На этой же позиции замкнуты контакторный элемент 23 и некоторые другие, которые в этом описании опущены. Тем самым подготавливаются цепи включения реостатных контакторов. На рис. 88 показана катушка только одного из них под номером И-2. Как уже было сказано, в электрической схеме электровоза ВЛ10 предусмотрено ослабление возбуждения тяговых двигателей на 1-й позиции. Для этого на главном валу контроллера машиниста имеются два дополнительных контакторных элемента К5 и К37, которые замыкаются только на 1-й позиции. Через эти контакторные элементы от провода 3 (напряжение на него подается только в режиме тяги в соответствии с разверткой реверсивно-селективного вала) получают питание катушки вентилей электропневматических контакторов ослабления возбуждения тяговых двигателей: 13-1, 13-2 — от провода К5; 14-1, 14-2 — от провода К37 через блок-контакт тормозного переключателя ТКП-М и провод 27. На 2-й позиции главного вала контроллера машиниста контакторные элементы К5 и К37 размыкаются и отключают контакторы обмотки возбуждения тяговых двигателей; двигатели начинают работать при полном возбуждении. На 3-й позиции замыкается контакторный элемент 13 главного вала, заземляя цепь питания катушки индивидуального контактора 11-2. «Плюс» источника питания соединяется с катушкой через контакторный элемент 23, замкнутый еще на 1-й позиции. Контакторные элементы 11—22 главного вала (на рис. 88 показаны только элементы 13 и 22) предназначены для подключения участков цепи управления, содержащих катушки индивидуальных контакторов пусковых реостатов. Очередность включения контакторов определяется разверткой кулачковых шайб главного вала контроллера машиниста. Вывод реостатных секций (включение контакторов) продолжается до 16-й позиции. Эта позиция — ходовая. На ней оказываются включенными цепи проводов 1(2), 3 реверсивно-селективного вала и цепи катушек индивидуальных контакторов пусковых реостатов, в частности 10-2 и 11-2 на рис. 88. Контакты индивидуальных контакторов шунтируют секции пускового реостата в силовой цепи тяговых двигателей. На 16-й позиции (и ходовых позициях 27-й и 37-й) может быть осуществлено ослабление возбуждения тяговых двигателей. Для этого рукоятку тормозного вала устанавливают в положение ОВ1 и далее в соответствии с режимом движения поезда перемещают ее на позиции ОВ2, ОВЗ, ОВ4. Когда тормозная рукоятка находится в положении ОВ1, через контакторный элемент 46, блок-контакт тормозного переключателя TKI-M питание подается на катушки контакторов 13-1 и 13-2. Контакторы включаются и шунтируют обмотки возбуждения полностью введенными резисторами. Перемещение тормозной рукоятки в положение ОВ2 приводит к возбуждению вентилей контакторов 14-1 и 14-2 по цепи через контакторный элемент 27. Силовые контакты вентилей отключают часть резисторов, шунтирующих обмотки возбуждения тяговых двигателей. Для перехода на следующие ступени ослабления возбуждения предусмотрены цепи управления, аналогичные рассмотренным. Замыкание их в соответствии с разверткой кулачковых шайб тормозного вала приводит к уменьшению сопротивления резисторов, шунтирующих обмотки возбуждения тяговых двигателей, и тем самым к увеличению степени ослабления возбуждения. Необходимо отметить, что система блокировок, не показанная на рис. 88, позволяет применять ослабление возбуждения тяговых двигателей только на ходовых позициях контроллера машиниста. Итак, мы рассмотрели последовательность действий машиниста и соответствующие им преобразования в цепи управления, которые обеспечивают движение электровоза на последовательном соединении тяговых двигателей. Переводя главную рукоятку на 17-ю позицию, машинист собирает схему цепи управления, необходимую для перехода двигателей с последовательного на последовательно-параллельное соединение: отключаются некоторые индивидуальные контакторы пускового реостата и часть его вновь вводится в цепь тяговых двигателей. Одновременно с этим замыкается контакторный элемент 7 и возбуждаются вентили группового переключателя КС ПО. Подробное описание этого перехода заняло бы много места. Кроме того, потребовалось бы значительно усложнить схему, показанную на рис. 88 и выполненную в расчете на читателя, который только начинает знакомиться с устройством электровозов. Принцип чтения схемы остается тем же: по разверткам валов определяют положение контакторных элементов, которые замыкаются или размыкаются на данной позиции по сравнению с предыдущей, прослеживают цепи от источника питания до земли, выявляя катушки контакторов, которые получили (или наоборот потеряли) питание и вследствие этого изменили на противоположное положение своих контактов в силовой цепи и блок-контактов в цепи управления. Необходимо отметить, что, начиная с 17-й позиции, включается в работу групповой переключатель КСПО,предназначенный для переключения тяговых двигателей с последовательного на последовательно-параллельное соединение, а с 27-й — групповые переключатели КСПI и КСПII, переключающие двигатели с последовательно-параллельного на параллельное соединение. Поскольку время срабатывания индивидуальных контакторов меньше, чем групповых, то блок-контакты последних выполняют еще одну функцию — обеспечивают включение реостатных контакторов только после установки групповых переключателей в соответствующее положение. Электрическая цепь управления благодаря блок-контактам обеспечивает необходимую последовательность работы аппаратов при обратном перемещении главной рукоятки контроллера машиниста.
Описание цепей управления будет неполным, если мы ограничимся рассмотрением только режима тяги, так как на электровозе ВЛ10 предусмотрено рекуперативное торможение. Перед переходом в режим рекуперации включают двигатель Д возбудителей (преобразователей) В, предназначенных для питания обмоток возбуждения тяговых двигателей в этом режиме. Затем реверсивно-селективную рукоятку устанавливают в одно из выбранных положений (П, СП или С, см. рис. 88) в зависимости от скорости движения электровоза. При установке ее в положение П от провода НПО через контакторные элементы реверсивно-селективного вала получают питание провода 4, 7, 24. По проводу 7 напряжение подается на катушки группового переключателя КСПО, вал которого поворачивается в положение СП-П. По проводу 24 получают питание катушки групповых переключателей КСПI и КСПII, валы которых поворачиваются в положение, соответствующее параллельному соединению тяговых двигателей. Нормально разомкнутые блок-контакты этих переключателей КСПО-СП-П, КСПI-П, КСПII-П замыкаются. После установки реверсивно-селективной рукоятки в положение П рукоятку тормозного вала ставят на позицию 02. При этом замыкается контакторный элемент 26 и по катушкам вентилей тормозных переключателей TKI-T и ТКII-Т проходит ток, замыкающийся по довольно сложной цепи: от провода HI 10, через замкнутый контакторный элемент 24 реверсивно-селективного вала, замкнутые блок-контакты КСПО-П, КСП1-П, КСПП-П, катушки ТК.1-Т и ТКП-Т, контакторный элемент 26 тормозного вала к земле. Тормозные переключатели TKI-T и ТКП-Т устанавливаются в положение, соответствующее рекуперативному режиму, переключая свои контакты в силовой цепи и блок-контакты в цепи управления. На позиции 02 тормозного вала замкнут также контакторный элемент 30, но его цепь1 получает питание только тогда, когда рукоятка главного вала поставлена в 1-ю позицию и замкнут контакторный элемент А. От источника питания через замкнутый контакторный элемент 30 и блок-контакты ТКI-Т и ТКII-Т получают питание катушки электропневматических контакторов 18-1, 18-2 и электромагнитного контактора 74-1. Включившись, указанные электропневматические контакторы подготавливают цепь питания обмоток возбуждения тяговых двигателей от преобразователя В. Контактор 74-1, включившись, силовыми контактами подготавливает цепь питания обмоток независимого возбуждения преобразователя В. Блок-контакты 74-1, находящиеся в цепи провода 1, создают следующий контур, по которому проходит ток: провод НПО, контакторный элемент 1(2), блок-контакты реверсоров, блок-контакт 74-1, блок-контакт 51-1, параллельно включенные катушки 17-2 и 2-2, земля. Катушки электропневматических контакторов 17-2 и 2-2, получившие питание, обеспечивают замыкание линейных контакторов в силовой цепи. Силовая цепь полностью подготовлена к режиму рекуперативного торможения. После установки тормозной рукоятки контроллера машиниста на 1-ю позицию замыкается контакторный элемент 27. При этом образуется цепь питания обмоток независимого возбуждения преобразователя: провод 27, замкнутый блок-контакт 18-1, регулировочный резистор R1—R16, провод Н45 и далее к обмоткам возбуждения преобразователя и земле (последние два участка схемы не показаны на рис. 88). Цепь питания от ГУ по проводу H110 имеет более сложную структуру: в нее входят блокировки и имеется несколько путей подвода питающего напряжения к контакторным элементам валов контроллера машиниста. По проводу 27 получают питание также катушки контакторов ослабления возбуждения тяговых двигателей 14-1 и 14-2, однако после их включения никаких изменений в силовой схеме не происходит, так как контакторы 13-1 и 13-2 разомкнуты, а силовые контакты указанных контакторов соединены в цепи обмотки возбуждения тяговых двигателей последовательно. В процессе перемещения тормозной рукоятки от 2-й до 15-й позиции отключаются секции регулировочного резистора R1—R16 при замыкании соответствующих контакторных элементов 34—46 тормозного вала. На 15-й позиции тормозной рукоятки контроллера машиниста регулировочный резистор независимой обмотки преобразователя полностью выводится (кроме R14— R15). На любом другом соединении тяговых двигателей, например С или СП, цепь управления работает аналогично рассмотренному. Порядок переключения аппаратов в режиме рекуперативного торможения определяется разверткой тормозного вала контроллера машиниста. В схемах цепей управления тяговых двигателей, в том числе и в схемах электровоза ВЛ10, имеются и другие контакторы, например ОД — отключатели двигателей, различные контакты реле (промежуточных, повышенного напряжения и др.). Подробно действие всей системы управления электровозов каждой серии описывается в специальной литературе.
СХЕМА ЦЕПИ УПРАВЛЕНИЯ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА
Как и на электровозах постоянного тока, цепи управления на электровозах переменного тока можно разделить на две части; цепи управления тяговыми двигателями и вспомогательные цепи управления. На электровозах переменного тока основным аппаратом, с помощью которого производят необходимые переключения в цепи управления, а следовательно, и в силовой цепи, также является контроллер машиниста. Цепи управления питаются постоянным током напряжением 50 В от генераторов управления или от статических выпрямителей. На электровозах ВЛ80т, ВЛ80с, ВЛ80р с электрическим торможением контроллер имеет три вала: главный, реверсивный и тормозной. На электровозах без электрического торможения (ВЛ60к, ВЛ80к) контроллер машиниста (рис. 90) выполнен с двумя валами: главным и реверсивным, совмещенным с валом ослабления возбуждения. Контроллер имеет две рукоятки управления — съемную реверсивную и главную.
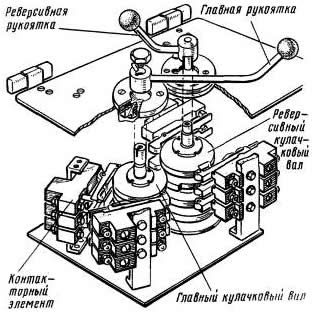
Рис.90. Контроллер машиниста электровоза переменного тока
С помощью реверсивной рукоятки машинист изменяет направление движения локомотива, включает или выключает ступени ослабления возбуждения. В соответствии с этим реверсивная рукоятка может занимать следующие положения (рис. 91): 0 — нулевое; ПВ — полное возбуждение для движения назад; ПВ — полное возбуждение для движения вперед; OBI, OB2, ОВЗ — ступени ослабления возбуждения для движения вперед. При этом включаются или выключаются контакторы ослабления возбуждения, шунтирующие секции резисторов в этих цепях (см. рис. 68). Как и на электровозах постоянного тока, реверсивная и главная рукоятки во избежание ошибочных действий машиниста сблокированы. Управление силовой цепью электровоза переменного тока сводится к управлению с помощью главной рукояткисерводвигателем СМ главного контроллера: его ручному "или автоматическому пуску, фиксации (остановке) серводвигателя на какой-либо позиции, его реверсированию, сбросу позиций и фиксации на позициях сброса. Пуск серводвигателя, его реверсирование, электрическое торможение осуществляются с помощью контакторов 208 и.206 (на рис. 91 сохранена нумерация аппаратов, присвоенная заводом-изготовителем), замыкающие и размыкающие контакты которых включены в его цепь. (Напомним, что все контакты на рис. 91 показаны в положении, соответствующем отсутствию тока в аппаратах.) В необходимых случаях с помощью главной рукоятки можно быстро выключить главный выключатель силовой цепи.

Рис. 91. Упрощенная схема цепи управления тяговыми двигателями электровоза переменного тока
В соответствии со сказанным главная рукоятка контроллера машиниста электровоза может занимать восемь позиций: 0— нулевая; БВ — быстрое выключение главного выключателя; АВ — автоматическое выключение; РВ — ручное выключение; ФВ — фиксация выключения; ФП — фиксация пуска; РП — ручной пуск; АП — автоматический пуск. Машинист при подготовке электровоза к пуску включает кнопку Цепь управления и замыкает специальным ключом контакт 213 блокировочного устройства тормозов, в результате чего подается напряжение 50 В в цепь управления контроллера. Затем машинист ставит главную рукоятку на позицию 0. Если при этом вал одного из двух главных контроллеров находится не на нулевой позиции (машинист управляет двумя главными контроллерами, расположенными в каждой секции локомотива), то через ряд блокировок замыкается цепь катушки контактора 208. Тогда включается его замыкающий контакт и выключается размыкающий в цепи серводвигателя. На позиции 0, как видно из развертки кулачковых шайб главного вала контроллера машиниста, катушка контактора 206 обесточена и его размыкающие контакты в цепи серводвигателя СМ включены так, что двигатель вращается в сторону сброса позиции. Как только вал главного контроллера установится в нулевую позицию, специальная блокировка прервет цепь катушки контактора 208, контакты которого разорвут цепь питания двигателя СМ и накоротко замкнут обмотку его якоря. В результате начнется электрическое торможение двигателя СМ. Затем машинист переводит главную рукоятку контроллера в положение фиксации пуска ФП, контактор 206 включится и его контакты подготовят цепь якоря серводвигателя СМ к тому, что при замыкании его цепи контактами контактора 208он начнет вращаться в направлении, соответствующем набору позиций. Контактор 208 включится при переводе главной рукоятки контроллера из положения ФП в положение РП и серводвигатель повернет вал группового переключателя на одну позицию набора. Как только этот поворот завершится, соответствующие блокировки пррвут цепи питания катушки контактора 208 и его размыкающие контакты замкнут накоротко якорь серводвигателя СМ. Для набора следующей позиции машинист должен поставить главную рукоятку снова в положение ФП, чтобы подготовить цепь якоря серводвигателя, и затем перевести рукоятку в положение РП. Переводя рукоятку с позиции на позицию, машинист следит за показаниями амперметра, чтобы не допустить перегрузки тяговых двигателей. Машинист может осуществлять и автоматический пуск локомотива. Для этого он должен поставить главную рукоятку в положение АП. В этом случае через катушку контактора 208 будет проходить ток до тех пор, пока машинист удерживает главную рукоятку в положении АП (это положение рукоятки нефиксированное). При этом двигатель СМ будет вращаться в направлении, соответствующем набору позиций. На последней, 33-й, позиции специальные блокировки разорвут цепь катушки 208. При наборе позиций катушка контактора 206 находится под током. Сброс позиций, так же как и пуск, может быть осуществлен вручную или автоматически. Для ручного сброса машинист ставит рукоятку поочередно в положения РВ и ФВ, для автоматического — в положение АВ. При сбросе позиций катушка контактора 206 обесточена. Следовательно, при автоматическом пуске или сбросе скорости машинист только ставит главную рукоятку контроллера в соответствующее положение, а все необходимые переключения производятся автоматически, без его участия. При разгоне электровоза с составом до необходимой скорости ток в тяговых двигателях не должен превышать значения, ограничиваемого условиями сцепления или коммутацией двигателей. Необходимые переключения в процессе автоматического пуска или снижения скорости могут происходить в зависимости от изменения тока. Этот способ используют в пригородных электропоездах, где масса состава, а следовательно, и начальное значение тока при пуске изменяются сравнительно мало. Масса грузовых составов, а значит, и зависящий от нее ток электровоза могут меняться в широких пределах. Осуществить автоматический пуск грузового электровоза в зависимости от изменения тока трудно. Поэтому необходимые переключения при пуске и снижении скорости производят через равные промежутки времени независимо от нагрузки двигателей. Промежутки времени, через которые происходит переход с одной позиции на другую, определяются частотой вращения серводвигателя и передаточным числом механизмов передачи от серводвигателя до кулачкового вала контакторов переключения ступеней. Такой способ автоматического управления называютхронометрическим. Безусловно, и при этом способе управления ток в двигателях не должен превышать максимального допустимого. Машинист в процессе как автоматического, так и ручного пуска должен следить за показаниями амперметра, включенного в цепь тяговых двигателей. Если ток превышает допустимый, он ставит главную рукоятку контроллера в положение ФП, т. е. приостанавливает автоматические переключения в силовой цепи, фиксируя вал главного контроллера на какой-либо промежуточной ступени регулирования. Если кулачковый вал контакторов переключения ступеней случайно застрянет между позициями, реле времени, которое имеет выдержку 2—3 с, своими контактами разорвет цепь удерживающей катушки главного выключателя, и он отключится. Машинисту необходимо знать, на какой позиции находится вал главного контроллера в процессе автоматического или ручного набора, а также сброса позиций. Поэтому в каждой кабине управления установлен указатель позиций (см. рис. 91). Стрелка указателя позиций связана с устройством, носящим название сельсин-приемника. Сельсин-приемник электрически соединен с сельсин-датчиком. Обмотки статоров сельсин-датчика и сельсин-приемника питаются однофазным переменным током напряжением 110В от специального трансформатора напряжения, подключенного к вспомогательной обмотке тягового трансформатора. Роторы сельсин-приемника и сельсин-датчика имеют трехфазные обмотки, электрически соединенные одна с другой. Ротор сельсин-датчика механически связан зубчатой передачей с валом серводвигателя (на рис. 91 условно показано, что ротор соединен с валом серводвигателя непосредственно). Обмотки статоров сельсинов создают пульсирующие магнитные потоки, которые наводят в трехфазных обмотках роторов равные э. д. с. При повороте вала главного контроллера, а следовательно, и ротора сельсин-датчика равенство э. д. с. нарушается и по соединительным проводам проходит ток. Это заставляет ротор сельсин-приемника повернуться точно на такой же угол, на какой повернулся сельсин-датчик. Тогда равенство э. д. с. восстанавливается. В схеме управления силовой цепью, как видно из рис. 91, используется много контактов и катушек реле, блок-контактов контакторов. Все они выполняют различные защитные и контрольные функции, например, контролируют включение двигателей вентиляторов, охлаждающих выпрямители, температуру масла в баке тягового трансформатора и т. п. Подробно их действие описывается для электровозов каждой серии в специальных руководствах по эксплуатации.