

Реостатне і частотне регулювання ад.
При плавному регулюванні швидкості обертання АЕП змінного струму більш поширено реостатне й частотне регулювання АД.
Реостатне регулювання має на мети зміну частоти обертання введенням опору у коло статора. Введення резисторів у коло статора (реостатне регулювання) дозволяє, як і для двигунів постійного струму, регулювати кутову швидкість двигуна. Плавність регулювання залежить від числа щаблів резисторів, що включають. Регулювання здійснюється вниз від основної кутової швидкості.
Реостатні характеристики асинхронного двигуна, як й у приводі постійного струму, відрізняються невисокою жорсткістю, що зменшується з ростом опору резисторів у роторному ланцюзі. Недоліками реостатного регулювання швидкості є: 1) необхідність дискретної зміни опору в роторному ланцюзі за допомогою силових апаратів, керованих дистанційно або вручну, що дає східчасте регулювання швидкості й виключає можливість використання замкнутих систем автоматичного керування; 2) невисока швидкодія; 3) більші втрати енергії.
Реостатне регулювання завдяки своїй простоті знаходить практичне застосування, наприклад, у приводі підйомно-транспортних пристроїв, вентиляторів і насосів малої й середньої потужності (до 100 кВт). Плавне безступінчасте регулювання кутової швидкості асинхронних двигунів при введенні резисторів у ланцюг статора або ротора можна одержати (при невеликій потужності двигуна), використавши імпульсне параметричне регулювання, застосовуване в автоматизованому електроприводі для стабілізації заданого значення кутової швидкості при зміні моменту навантаження або для попереднього зниження швидкості перед зупинкою приводу.
Схема включення асинхронного двигуна з коротко замкненим ротором при імпульсному регулюванні додаткового опору (у всіх трьох фазах) у ланцюзі статора наведена на рис. 4.7, а. Механічні характеристики двигуна, включеного за цією схемою, для різних значень шпаруватості показані на рис. 4.7, б.
При
![]() двигун
буде працювати на природній характеристиці
(ключі двосторонньої провідності —
напівпровідникові або контактні —
постійно замкнуті). При
двигун
буде працювати на природній характеристиці
(ключі двосторонньої провідності —
напівпровідникові або контактні —
постійно замкнуті). При
![]() двигун
буде працювати на реостатній характеристиці,
що відповідає постійно включеному
резистору
двигун
буде працювати на реостатній характеристиці,
що відповідає постійно включеному
резистору
![]() (ключі
розімкнуті). Як відомо, при збільшенні
активного опору ланцюга статора
зменшуються максимальний момент і
критичне ковзання, модуль жорсткості
механічної характеристики й стабільність
кутової швидкості зменшуються.
(ключі
розімкнуті). Як відомо, при збільшенні
активного опору ланцюга статора
зменшуються максимальний момент і
критичне ковзання, модуль жорсткості
механічної характеристики й стабільність
кутової швидкості зменшуються.
Припустимий
момент асинхронного двигуна з коротко
замкненим ротором при імпульсному
параметричному регулюванні
зі зниженням кутової швидкості різко
падає (як це
показано штриховою лінією на рис. 4.7,
б), тому що
значно зростають втрати в ньому (втрати
в ланцюзі ротора
рівні
![]() ),
а виділяються вони всі усередині машини.
Для двигуна з незалежної (примусової)
вентиляцією в міру збільшення ковзання
потрібно так зменшувати момент
навантаження, щоб втрати у двигуні не
перевищували номінальних.
Тому схема, показана на рис.4.7 а, може
бути використана в приводах малої
потужності й у короткочасному режимі
роботи.
По цій же причині діапазон регулювання
звичайно не перевищує (1,15-1,2) : 1 при
тривалому режимі роботи.
У короткочасному режимі роботи регулювання
кутової швидкості в більше широких
межах може вироблятися лише при здійсненні
замкнутих систем керування, у яких
використаються зворотні зв'язки для
автоматичної підтримки кутової швидкості
двигуна на заданому рівні.
),
а виділяються вони всі усередині машини.
Для двигуна з незалежної (примусової)
вентиляцією в міру збільшення ковзання
потрібно так зменшувати момент
навантаження, щоб втрати у двигуні не
перевищували номінальних.
Тому схема, показана на рис.4.7 а, може
бути використана в приводах малої
потужності й у короткочасному режимі
роботи.
По цій же причині діапазон регулювання
звичайно не перевищує (1,15-1,2) : 1 при
тривалому режимі роботи.
У короткочасному режимі роботи регулювання
кутової швидкості в більше широких
межах може вироблятися лише при здійсненні
замкнутих систем керування, у яких
використаються зворотні зв'язки для
автоматичної підтримки кутової швидкості
двигуна на заданому рівні.
Зміна
частоти
живлячої напруги випливає з формули
![]()
![]() При регулюванні
частоти також виникає
необхідність регулювання амплітуди
напруги
джерела, що треба з вираження
При регулюванні
частоти також виникає
необхідність регулювання амплітуди
напруги
джерела, що треба з вираження
![]()
![]() . Якщо при
незмінній напрузі змінювати частоту,
то потік буде змінюватися зворотно
пропорційно частоті.
Так, при зменшенні частоти потік зросте
й це приведе до насичення стали машини
і як наслідок до різкого збільшення
струму й перевищенню температури
двигуна; при збільшенні частоти потік
буде зменшуватися і як наслідок буде
зменшуватися припустимий момент.
. Якщо при
незмінній напрузі змінювати частоту,
то потік буде змінюватися зворотно
пропорційно частоті.
Так, при зменшенні частоти потік зросте
й це приведе до насичення стали машини
і як наслідок до різкого збільшення
струму й перевищенню температури
двигуна; при збільшенні частоти потік
буде зменшуватися і як наслідок буде
зменшуватися припустимий момент.

Рис. 4.7. Принципова схема імпульсного параметричного керування асинхронним двигуном з короткозамкненим ротором (а) і механічні характеристики (б).
Для найкращого використання асинхронного двигуна при регулюванні кутової швидкості зміною частоти необхідно регулювати напругу одночасно у функції частоти й навантаження, що реалізовано тільки в замкнутих системах електропривода. У розімкнутих системах напруга регулюється лише у функції частоти за деяким законом, що залежить від виду навантаження.
Частотне регулювання кутової швидкості електроприводів змінного струму із двигунами з короткозамкненим ротором знаходить все більше застосування в різних галузях техніки. Для здійснення частотного регулювання кутової швидкості знаходять застосування перетворювачі, на виході яких по необхідному співвідношенню або незалежно міняється як частота, так й амплітуда напруги. Перетворювачі частоти можна розділити на електромашинні й статичні (вентильні).
Найбільше застосування може мати статичний перетворювач частоти із проміжною ланкою постійного струму, структурна схема якого наведена на рис. 4.8. Перетворювач складається із двох силових елементів - керованого випрямляча УВ й інвертора И. На вхід УВ подається нерегульована напруга змінного струму промислової частоти; з виходу УВ постійна регульована напруга подається на інвертор И, що перетворить постійну напругу в змінне регульованої амплітуди й частоти (В - керований випрямляч; И - інвертор; БУВ, БУИ - відповідно блок керування випрямлячем й інвертором; БЗС - блок завдань швидкості).
Крім двох силових елементів, перетворювач містить ще систему керування, що складає блок керування випрямлячем БУВ і блок керування інвертором БУИ. Вихідна частота регулюється в широких межах і визначається частотою комутації тиристорів інвертора, що задається блоком керування інвертором БУИ. У такій схемі виробляється роздільне регулювання амплітуди й частоти вихідної напруги, що дозволяє здійснити за допомогою блоку завдання швидкості БЗС необхідне співвідношення між діючим значенням напруги й частотою на затисках асинхронного двигуна.
Перетворювач із проміжною ланкою постійного струму дозволяє регулювати частоту як нагору, так і вниз від частоти живильної мережі; він відрізняється високим ККД (близько 0,96), значною швидкодією, малими габаритами. Економічні вигоди частотного регулювання особливо істотні для приводів, що працюють у повторно-короткочасному режимі, де має місце часта зміна напрямку обертання з інтенсивним гальмуванням.
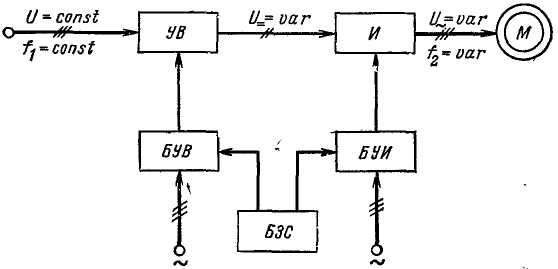
Рис. 4.8. Структурна схема статичного перетворювача частоти
із проміжною ланкою постійного струму.
Електромашинні перетворювачі можуть бути виконані із проміжною ланкою постійного струму й безпосереднім зв'язком. В останні використають колекторну машину змінного струму, на вхід якої подають змінну напругу з постійною частотою й амплітудою, а на виході її одержують напругу з регульованою частотою й амплітудою. Електромашинні перетворювачі з безпосереднім зв'язком практичного застосування не одержали.
Принципова схема електромашинного перетворювача із проміжною ланкою постійного струму, у якому використається синхронний генератор, показана на рис. 4.7. Перетворювач складається з агрегату постійної швидкості (Ml, G1), призначеного для перетворення змінного струму напруги мережі й незмінної частоти в регульовану постійну напругу, що залежить від струму збудження генератора постійного струму G1. Двигун постійного струму М2, як агрегат змінної швидкості, одержує живлення від генератора G1. При зміні напруги на генераторі G1 плавно регулюється кутова швидкість двигуна М2 й одночасно кутова швидкість синхронного генератора G2, Зміна кутової швидкості генератора G2 при незмінному струму його збудження приводить до пропорційної зміни швидкості, частоти й амплітуди напруги генератора G2.

Рис. 4.7. Принципова схема електромашинного перетворювача частоти із проміжною ланкою постійного струму з використанням синхронного генератора.
Від синхронного генератора G2, що є джерелом напруги зі змінною частотою й амплітудою, живляться один або група асинхронних двигунів з короткозамкненим ротором МЗ - М5. Міняючи напрямок струму збудження генератора постійного струму G1, можна змінювати) напрямок обертання асинхронних двигунів. При незмінному струму збудження синхронного генератора G2 і двигуна постійного струму М2, міняючи його кутову швидкість, можна автоматично регулювати вихідну напругу за законом U2/f2 = const. У цьому випадку зі зниженням частоти знижується перевантажувальна здатність асинхронних двигунів і тому діапазон регулювання при постійному моменті навантаження помітно зменшується. Більший діапазон регулювання із забезпеченням необхідної перевантажувальної здатності (стосовно статичного моменту навантаження) може бути отриманий при вентиляторному навантаженні.