

ДВИГАТЕЛИ
ВНУТРЕННЕГО
СГОРАНИЯ
2
Динамика
и
конструирование
Издание
третье, переработанное
Под
редакцией
члена-корреспондента
РАН,
проф.,
д-ра техн. наук В.Н. Луканина
и проф.,
д-ра техн. наук М.Г. Шатрова
Допущено
Министерством
образования и пауки
Российской
Федерации
в качестве учебника для
студентов
высших учебных
заведений,
обучающихся но
специальности
«Автомобили и
автомобильное хозяйство»
направления
подготовки дипломированных
специалистов
«Эксплуатация наземного
транспорта
и транспортного оборудования»
МОСКВА
«ВЫСШАЯ ШКОЛА» 2007![]()
УДК
621.43 ББК 31.365 Д 23
Учебник-комплекс
«ДВС» удостоен премии Правительства
Российской Федерации в области науки
и техники за 1999 год
Авторы:
В. Н. Луканин, И. В. Алексеев, М. Г. Шатров,
А.
В. Павлов, Ю. В. Горшков, Н. И. Назаров, С.
П. Ежов,
Л.
М. Манохин, В. В. Синявский
Рецензент
—
кафедра «Поршневые и комбинированные
двигатели»
МГТУ
им. Н. Э. Баумана (зав. кафедрой —
заслуженный деятель науки и техники
РФ, д-р техн. наук, проф. Н. А. Иващенко)
Двигатели
внутреннего сгорания. В 3 кн. Кн. 2.
Динамика Д 21 и конструирование: Учебник
для вузов/В. Н. Луканин, И. В. Алексеев,
М. Г. Шатров и др.; Под ред. В. Н. Луканина
и М. Г. Шатрова. — 3-е изд. перераб. — М.:
Высш. шк., 2007. — 400 с.: ил.
ISBN
978-5-06-004143-9
В
книге содержатся сведения по кинематике
и динамике кривошипношатунного
механизма, излагаются вопросы
уравновешивания, колебаний, шума и
вибрации ДВС и их элементов; проведен
анализ условий работы, особенностей
конструкции, расчета деталей и систем
ДВС; рассмотрены основы проектирования
ДВС с использованием ЭВМ.
Для
студентов технических
вузов и специалистов.
УДК
621.43 ББК 31.365
ISBN
978-5-06-004143-9
(кн. 2)
ISBN
978-5-06-004145-3 © ФГУП
«Издательство «Высшая школа», 2007
Оригинал-макет
данного издания является собственностью
издательства «Высшая школа», и его
репродуцирование (воспроизведение)
любым способом без согласия издательства
запрещается.
ПРЕДИСЛОВИЕ
Настоящая
книга является второй частью учебника
по двигателям внутреннего сгорания,
включающей разделы, касающиеся
кинематики, динамики, основ конструирования
и расчета элементов и систем ДВС.
Основу
приведенного в книге учебного материала
составляют курсы лекций, которые
читались членами авторского коллектива
в МАДИ (ГТУ) для студентов, обучающихся
по направлению «Наземные транспортные
системы», и по объему и содержанию
соответствовали их учебным планам
и программам.
Учебник
может быть использован также студентами
высших учебных заведений, обучающихся
по направлению «Энергомашиностроение»
и специальности «Двигатели внутреннего
сгорания»; по направлению «Технологические
машины и оборудование» и специальности
«Подъемно-транспортные, строительные,
дорожные машины и оборудование»; по
направлению «Эксплуатация транспортных
средств» и специальностям «Организация
дорожного движения», «Сервис и
техническая эксплуатация транспортных
и технологических машин и оборудования»
(автомобильный транспорт; строительное,
дорожное и коммунальное машиностроение);
по направлению «Наземные транспортные
системы» и специальностям «Автомобиле-
и тракторостроение», «Автомобили и
автомобильное хозяйство», «Машины
инженерного вооружения».
Методика
изложения материала отдельных разделов
максимально адаптирована к современным
способам анализа работоспособности,
а также термической и динамической
нагруженности элементов двигателя
с использованием ЭВМ.
В
учебный материал включены новейшие
достижения в конструировании
двигателей, используемых в средствах
наземного транспорта, их элементов
и систем, а также описаны современные
технологии их производства,
эксплуатации и ремонта.
Во
второй книге авторы учли изменения
в двигателестроении, происшедшие со
времени ее первого издания (1995).
Отдельные
разделы написали: В. Н. Луканин —
предисловие, гл. 15; И. В. Алексеев —§
1.1.2, гл. 2, 8
(кроме § 8.15); М. Г. Шатров— главы 1
(кроме § 1.1.2) § 1.1.1, 1.2, 3.5, гл. 4, 5, § 8.15, 9.4;
А. В. Павлов — гл. 7, 10, 14; Ю. В. Горшков —
гл. 6,
11, § 9.1, 9.2,
3
9.3;
Н. И. Назаров — гл. 3 (кроме § 3.5), 15; С. П.
Ежов — § 12.1,
13.1,
13.2; JI.
М.
Матюхин — § 13.3; В. В. Синявский — § 12.3.
Авторский
коллектив выражает искреннюю благодарность
коллективу кафедры «Поршневые
двигатели» МГТУ им. Н. Э. Баумана (зав.
кафедрой — д-р техн. наук, проф. Н. А.
Иващенко) за принципиальное и
доброжелательное рецензирование
рукописи. Их замечания во многом
способствовали улучшению качества
учебника.
Авторы
КИНЕМАТИКА
И ДИНАМИКА КРИВОШИПНО-ШАТУННОГО
МЕХАНИЗМА
КИНЕМАТИКА
КРИВОШИПНО-ШАТУННОГО
МЕХАНИЗМА
В
автотракторных ДВС в основном используются
следующие три типа кривошипно-шатунного
механизма (КШМ): центральный
(аксиальный),
смещенный
(дезаксиальный) и механизм
с прицепным шатуном
(рис. 1.1). Комбинируя данные схемы, можно
сформировать КШМ как линейного, так
и многорядного многоцилиндрового ДВС.
Реализация
смещенного (дезаксиального) механизма
возможна в двух вариантах: в первом
случае ось цилиндра не пересекает ось
коленчатого вала ДВС, а во втором — ось
поршневого пальца смещается относительно
оси цилиндра.
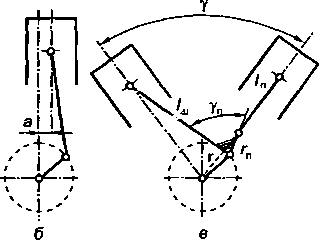
Кривошипно-шатунный
механизм с прицепным шатуном отличается
от других схем наличием прицепного
шатуна, соединенного пальцем с
главным шатуном в его кривошипной
головке.
Рис.
1.1. Кинематические схемы: а
— центрального КШМ; б — смещенного
КШМ; я механизма с прицепным шатуном
5Глава 1
Необходимо
отметить, что кинематика механизма
главного шату-
на не отличается от
кинематики центрального и смещенного
КШМ.
Изучение
законов движения деталей КШМ проводится
с учетом
только его структуры и
геометрических соотношений между
звенья-
ми механизма независимо от
сил, вызывающих его движение, и сил
трения,
при отсутствии зазоров между сопряженными
элементами
и постоянной угловой
скорости кривошипа.
При
работе ДВС основные элементы КШМ
совершают различ-
ные ни/ты
перемещений. Поршень движется
возвратно-поступатель-
но. Шатун
совершает сложное плоскопараллельное
движение
в плоскости его качания.
Кривошип коленчатого вала
совершает
вращательное движение
относительно его оси.
КИНЕМАТИКА
ЦЕНТРАЛЬНОГО И СМЕЩЕННОГО
КРИВОШИПНО-ШАТУННЫХ
МЕХАНИЗМОВ
Расчетная
кинематическая схема КШМ представлена
на рис. 1.2.
Основными геометрическими
параметрами, определяющими зако-
ны
движения элементов центрального КШМ,
являются радиус кри-
вошипа коленчатого
вала г
и длина шатуна /ш.
Параметр
А=г//Ш
является критерием кинематического
подо-
бия цеп трального механизма.
При этом для КШМ различных раз-
мером,
по с одинаковыми X
законы движения аналогичных элемен-
том
подобны. В автотракторных ДВС используются
механизмы
с
Я 0,24...0,31.
смещенных
КШМ
существует еще один
геометрический пара-
мс I р, нлияющий
на его кинематику,— величина смещения
оси ци-
линдра
(пальца) относительно оси
коленчатого
вала а.
При этом от-
носительное смещение
k=ajr
явля-
ется
дополнительным (к X)
критери-
ем кинематического подобия.
Таким
образом, подобные смещенные
КШМ
имеют одинаковые А
и к,
где
к
изменяется в пределах 0,02...0,1.
Как
следует из схемы (см. рис.
1.2), кинематика
КШМ полностью
описывается, если
известны законы
изменения по времени
следующих
параметров:
перемещения
поршня х.
Наяа-
ло отсчета (х=0)
— положение по-
ршня в верхней мертвой
точке
6
Рис.
1.2. Расчетные схемы КШМ: а
— центрального; б
— смещенного
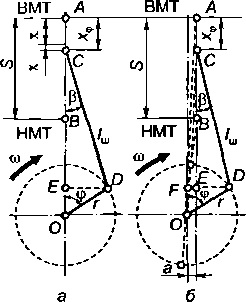
(ВМТ);
за положительное направление отсчета
принято его движение от ВМТ к нижней
мертвой точке (НМТ) при вращении
кривошипа по часовой стрелке;
угла
поворота кривошипа (р.
Начало отсчета (<р=0) соответствует
положению кривошипа при нахождении
поршня в ВМТ;
угла
отклонения шатуна от оси цилиндра /?
(Ji—О
при <р=0).
Кинематика
кривошипа. Вращательное движение
кривошипа коленчатого вала определено,
если известны зависимости угла поворота
ср,
угловой скорости оз
и ускорения е от времени t.
При
кинематическом анализе КШМ принято
делать допущение о постоянстве
угловой скорости (частоты вращения)
коленчатого вала to.
Тогда
<p=a>t,
о;=const
и
е=0. Угловая скорость и частота вращения
кривошипа коленчатого вала п
связаны соотношением о>=пп/30.
Данное допущение позволяет изучать
законы движения элементов КШМ в более
удобной параметрической форме — в виде
функции от угла поворота кривошипа и
переходить при необходимости к
временной форме, используя линейную
связь (pat.
Кинематика
поршня. Кинематика возвратно-поступательно
движущегося поршня описывается
зависимостями его перемещения х,
скорости
v
и
ускорения j
от
угла поворота кривошипа <р.
Перемещение
поршня
при повороте кривошипа на угол (р
определяется как сумма его смещений
от поворота кривошипа на угол q>
(х^)
и от отклонения шатуна на угол /? (хп):
х9=г+1ш—rcos<p—/шсоб/?
или
с учетом X=rjlm
=г
[(1 — cos
q>)+(1/X)
(1 — cos
Р)]. (1.1)
Связь
между углами q>
и
Р
определяется по общей стороне DE
треугольников
ODE
и
CDE
(см.
рис. 1.2, а), откуда для центрального
механизма rsin(p=lmsinfi
или
Xsinq>=sinр,
а для смещенного г
sin
(р—а=1ш
sin
fi,
A(sing>—fc)=sin/f.
Используя
данные соотношения, а также учитывая,
что cosfi=yj\
—
sin4/},
получим
следующие зависимости перемещения
поршня от угла поворота кривошипа:
для
центрального КШМ
x9=r
[(1
- cos
<р)
+
(l/X)(l-y/l-X2
sin2
ф)]; (1.2)
для
смещенного КШМ
С
целью упрощения расчетных зависимостей
для центрального КШМ разложим в ряд по
формуле бинома Ньютона радикал
■J\
— X2
sin2
<jp:
yJ\
— Xz
sin2
= 1 —- (Я
sin
ф)2—-
(Я
sin
<p)4
—- (Я
sin
<p)6
—
8
16
——
(Яsin<в)8-^-...
128
При
A=0,25
амплитуды
при гармонических членах разложения
соотносятся как 1:0,031:0,000488:0,000015, а при
А=0,30 — как 1:0,045:0,001012:0,000046. С учетом этого
с достаточной для практики точностью
можно ограничиться двумя первыми
членами разложения и полагать
>/l
—
Я2
sin2
«1
— ^ Я2
sin2
=
1 —' Я2
(1 —cos
2
ф).
Тогда
дг,»г[(1
— cos
<р)+(Я/4)
(1—cos
2<р)]=Jcr+хп. (1.4)
Скорость
поршня
определяется как первая производная
от перемещения поршня по времени, т. е.
dx
dx dtp
r„=-
= , (1.5)
dt
dtp dt
■n
o
применительно
к уравнениям (1.1)
и
(1.4) дает точную
=газ
sin
(<р+j3)/cos
/J (1.6)
и
приближенную
vv
к.
rco
[sin
q>
+
(Я/2)
sin
2<р] (1.7)
зависимости
скорости поршня от угла поворота
кривошипа.
Как
видно из (1.6), максимального значения
скорость достигает при <p+f}=90°,
когда sin
(<р+/0=
1. При этом ось шатуна перпендикулярна
радиусу кривошипа и
*Wx=го}^/\+
Я2. (1.8)
Широко
применяемая для оценки конструкции
ДВС средняя
скорость поршня,
которая определяется как сП=Sn/ЗО,
связана
Рис.
1.4. Кинематические параметры шатуна: а
— угловое перемещение; б
— угловая скорость, в — угловое ускорение
члене,
пропорциональном кХ.
Так как для современных двигателей
£А=0,01...0,05, то его влияние на кинематику
механизма невелико и на практике им
обычно пренебрегают.
Кинематика
шатуна. Сложное плоскопараллельное
движение шатуна складывается из
перемещения его верхней головки с
кинематическими параметрами поршня
и его нижней кривошипной головки с
параметрами конца кривошипа. Кроме
того, шатун совершает праща гслыюе
(качательное) движение относительно
точки сочленении ша гуиа. с поршнем.
Угловое
перемещение шатуна fi=arcsin
(X
sin
<р).
Экстремальные шачсния р=±arcsinX
имеют место при <р
=90
и 270°. В авто- фикюрных двигателях pmiX=
+(12...18°).
Угловая
скорость качания шатуна
а>ш=df}mjdt
или
Шш=
=ХсО
COS
ф/cos
/?ш.
Экстремальные
значения (от=+Ха>
наблюдаются при <р=0
и 180°.
Угловое
ускорение шатуна
doim
d(oш
dtp <&ош . А2
еш=—=
= со =/er
sm<j9-
dt dtp
dt dtp
1
(1
—A2
sin2
<p)
3/2
Экстремальные
значения еш=
±Xco2/iJl+X2
достигаются
при <р=90 и 270°.
Изменение
кинематических параметров шатуна по
углу поворота коленчатого вала
представлено на рис. 1.4.
ю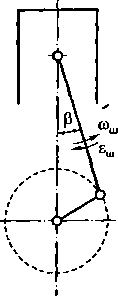

_ Расшире- „
Впуск
Сжатие
ние
Выпуск
Рис.
1.8. Перестроение индикаторной диаграммы
из р
— V-в
р
— ^-координаты
р—V
в координаты р
— (р
посредством определения Vv=x4J?u
с
использованием зависимости (1.1)
или графических методов (рис. 1.8).
Сила
давления газов, действующая на поршень,
нагружает подвижные элементы КШМ,
передается на коренные опоры картера
и уравновешивается внутри двигателя
за счет упругой деформации
Рис.
1.9. Воздействие газовых сил на элементы
конструкции КШМ
15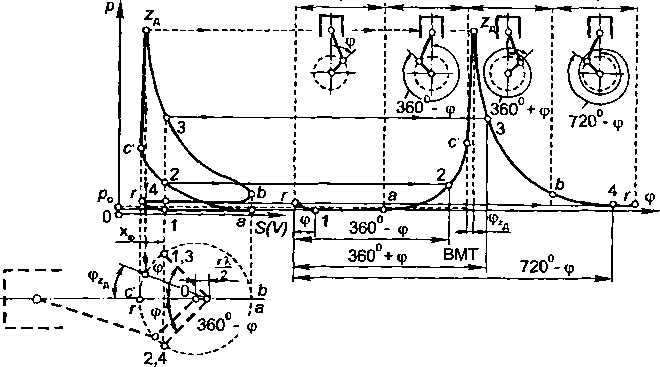
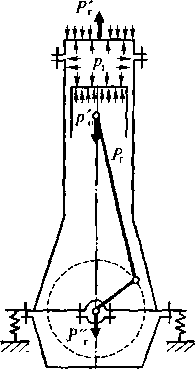
элементов,
формирующих внутрицилиндровое
пространство, силами Рт
и PI-,
действующими
на головку цилиндра и на поршень, как
это
показано на рис. 1.9. Эти силы не передаются
на опоры двигателя и не вызывают его
неуравновешенности.
СИЛЫ
ИНЕРЦИИ ДВИЖУЩИХСЯ МАСС КШМ
Реальный
КШМ представляет собой систему с
распределенными параметрами, элементы
которой движутся неравномерно, что
вызывает появление инерционных сил.
Детальный
анализ динамики такой системы
принципиально возможен, однако
сопряжен с большим объемом вычислений.
В
связи с этим в инженерной практике для
анализа динамики КШМ широко используют
динамически эквивалентные ему системы
с сосредоточенными параметрами,
синтезируемые на основе метода замещающих
масс. Критерием эквивалентности является
равенство в любой фазе рабочего цикла
совокупных кинетических энергий
эквивалентной модели и замещаемого ею
механизма. Методика синтеза модели,
эквивалентной КШМ, базируется на замене
его элементов системой масс, связанных
между собой невесомыми абсолютно
жесткими связями.
Детали
поршневой группы совершают прямолинейное
возвратно-поступательное движение
вдоль оси цилиндра и при анализе ее
инерционных свойств могут быть замещены
равной им массой т^,
сосредоточенной
в центре масс, положение которого
практически совпадает с осью поршневого
пальца. Кинематика этой точки опи-
смнисгси законами движения поршня,
вследствие чего сила инерции поршня
Pj„=
—mj,
где
j—
ускорение центра масс, равное ускорению
поршня.
Кривошип
коленчатого вала совершает равномерное
вращательное движение.
Конструктивно он состоит из совокупности
двух половин коренных шеек, двух щек
и шатунной шейки. Инерционные свойства
кривошипа описываются суммой центробежных
сил элементов, центры масс которых
не лежат на оси его вращения (щеки и
шатунная шейка): Кх=KrnLm+IK^=m^^rm2+2ЖщРщси2,
где Кгвиш,
Кгщ
иг, рщ
— центробежные силы и расстояния от
оси вращения до центров масс соответственно
шатунной шейки и щеки, ттт
и Шщ
— массы соответственно шатунной шейки
и щеки. При синтезе эквивалентной
модели кривошип заменяют массой /и,,
находящейся на расстоянии г от оси
вращения кривошипа. Величину определяют
из условия равенства создаваемой ею
центробежной силы сумме центробежных
сил масс элементов кривошипа, откуда
после преобразований получим
т1=тш_ш+2тщрщ/г.
Элементы
шатунной группы совершают сложное
плоскопараллельное движение,
которое может быть представлено как
совокуп
16
ность
поступательного движения с кинематическими
параметрами центра масс и вращательного
движения вокруг оси, проходящей через
центр масс перпендикулярно плоскости
качания шатуна. В связи с этим ее
инерционные свойства описываются двумя
параметрами — инерционными силой
и моментом. Любая система масс по своим
инерционным параметрам будет эквивалентна
шатунной группе в случае равенства их
инерционных сил и инерционных моментов.
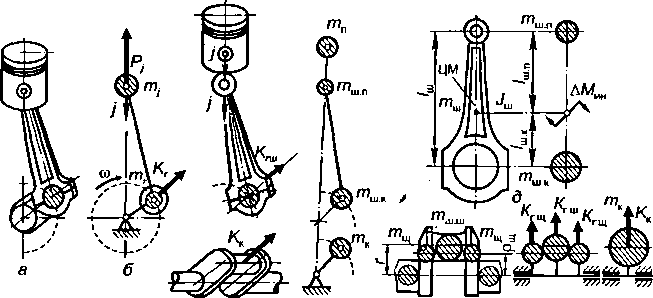
Простейшая из них, показанная на рис.
1.10, состоит из двух масс, одна из которых
тшп=тш/пи//ш
сосредоточена на оси поршневого пальца,
а другая m^r=m,„L„/L
—
в центре шатунной шейки коленчатого
вала. Здесь /щ.ц
и — расстояния от точек размещения
масс до центра масс. В этом случае для
обеспечения жвивалентности инерционных
свойств необходимо, чтобы соблюдались
следующие условия:
сумма
масс эквивалентной системы должна
быть равна массе I руппы шатуна:
таи1+тшл=тш1
положение
центра масс эквивалентной системы
должно со- ннадать с центром масс
шатунной группы. Выполнение этого
усло- ния при равенстве длин эквивалентной
системы и шатуна гаран-
ирует
тождественность их кинематики;
сумма
моментов инерции масс эквивалентной
модели должна быть равна моменту
инерции реального шатуна /ш
относительно оси, проходящей через
центр масс перпендикулярно плоскости
качания.
Первых
два условия в данном случае выполняются,
так как w...
..+m,„,=m,„L +mJL
JL=mm
и
сумма статических момен-
1ов
масс эквивалентной системы относительно
точки О,
соот-
е
г
0,50,5ткш
е
Рис.
1.10. Формирование эквивалентной
динамической модели КШМ:
КШМ;
б
— зквивале
шатуdfcj#
V-KiactM
юсы
КШМ; д
— массы
17
![]()
ветствующей
центру масс шатунной группы, =
rl
^niViTi
и
/72ш(^ШЛ1/ =
0.
Третье
условие для шатунов существующих ДВС
обычно не выполняется. Принципиально
это несоответствие может быть
скомпенсировано добавлением к системе
инерционного момента AMm=(Jm—J3a)E,
где
в
— угловое ускорение шатуна. На практике
данной добавкой пренебрегают ввиду
незначительной ее величины.
Таким
образом, эквивалентная система,
замещающая КШМ, представляет собой
систему двух жестко связанных между
собой масс:
массу,
сосредоточенную на оси пальца и
совершающую возвратно-поступательное
движение вдоль оси цилиндра с
кинематическими параметрами поршня,
mj=mu+mniM;
массу,
расположенную на оси шатунной шейки
и совершающую вращательное движение
вокруг оси коленчатого вала, тг=тх+тшх
(для V-образных
ДВС с двумя шатунами, расположенными
на одной шатунной шейке коленчатого
вала, тг=
=т1+2тшх.
В
соответствии с принятой моделью КШМ
масса щ
вызывает силу инерции Р}=
—nijj,
а
масса тг
создает центробежную силу инерции К,=
— а.„
1П/яг=пигаз2.
Статистические
данные
по
рассмотренным параметрам КШМ современных
автотракторных двигателей представлены
в табл. 1.1
п
виде конструктивных масс m'=m/Fu,
где
F„
—
площадь поршня; т
масса соответствующего элемента КШМ.
Таблица
1.1
Тип |
Частота |
Конструктивная масса т‘, кг/м1 |
Отношение 4п_ж//ш |
||
двигателя |
мин-1 |
поршневой группы |
шатуна |
линейные |
V-образные |
Двигатели с искровым зажиганием |
и <4500 и >4500 |
(1,08—1,2)2)* (1,2-1,25)2) |
(1,35.-1,45)2) (1,7...2,0)/) |
0,26...0,28 0,26-0,28 |
0,28-0,30 0,28-0,30 |
Дизели автомобильные |
л <3000 л >3000 |
(1,8...2,0)1) (1,5-1,7)2) |
(2,1—2,25)2) (1,б...1,9)2) |
0,26-0,30 0,22-0,23 |
0,30-0,34 0,22-0,23 |
Дизели тракторные |
— |
(2,0...2,2)2) |
(2,3...2,5 )D |
0,26-0,30 |
0,30-0,34 |
*D — диаметр цилиндра, мм.
Сила инерции Р} уравновешивается реакциями опор, на которые установлен двигатель. Будучи переменной по величине и направлению, она, если не предусмотреть специальных мероприятий по ее
18
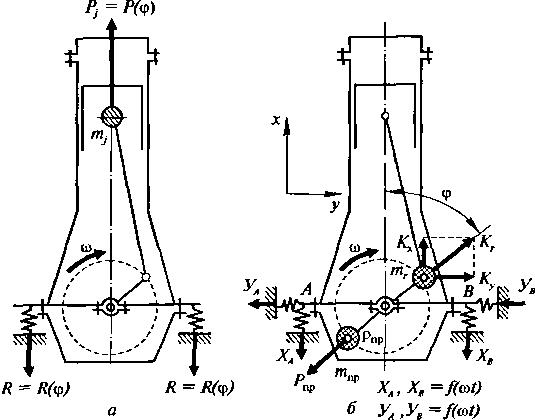
Рис. 1.11. Воздействие сил инерции на опоры двигателя: а — сила Pj, б —-сила Kr; Kx=Krcos<p=Krcos(a>t); Ky=Krstup=Krsn(c)f)
уравновешиванию, может быть причиной внешней неуравновешенности двигателя, как это показано на рис. 1.11, а.
При анализе динамики ДВС и особенно его уравновешенности с учетом полученной ранее зависимости ускорения j от угла поворота кривошипа <р силу инерции Р} удобно представлять в виде суммы двух гармонических функций, которые отличаются амплитудой и скоростью изменения аргумента и называются силами инерции первого (Рд) и второго (Рул) порядка:
Pj= —mjrco2(cos(p+Xcos2(p) =
= С cos q> + AC cos 2q> — Pfl+P/П,
|деС=— /и/со2.
Центробежная сила инерции Кг=тггсо2 вращающихся масс КШМ представляет собой постоянный по величине вектор, направ- иснный от центра вращения по радиусу кривошипа. Сила К, переда- I' гея на опоры двигателя, вызывая переменные по величине реакции (рис. 1.11, б). Таким образом, сила К„ как и сила Pj, может являться причиной неуравновешенности ДВС.
19
СУММАРНЫЕ
СИЛЫ И МОМЕНТЫ, ДЕЙСТВУЮЩИЕ В КШМ
При
динамическом анализе КШМ силы Рт
и Pj,
имеющие
общую точку приложения к системе и
единую линию действия, заменяют
суммарной силой, являющейся их
алгебраической суммой: РЕ=РГ+Р,(рис.
1.12).
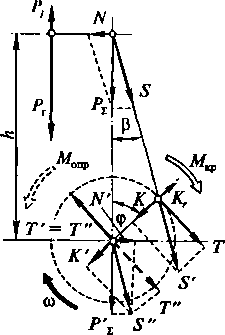
Для
анализа действия силы на элементы КШМ
ее раскладывают на две составляющие:
S
и
N.
Сила
S
действует
вдоль оси шатуна и вызывает
повторно-переменное сжатие — растяжение
его элементов, а сила N
перпендикулярна
оси цилиндра
и прижимает поршень к его зеркалу.
Действие силы S
на
сопряжение шатун — кривошип можно
оценить, перенеся ее вдоль оси шатуна
в точку их шарнирного сочленения (S’),
где
она раскладывается на нормальную
силу К,
направленную по оси кривошипа, и
тангенциальную силу Т.
Силы
К
и Т
передаются на коренные опоры двигателя.
Для анализа характера нагружения
коренных опор двигателя сила К
переносится по линии ее действия в
центр коренной опоры (КУ,
сюда же добавляются равные по модулю
силе Т
и имеющие параллельные с ней линии
действия силы Т'
и Т"
(см. рис. 1.12, а).
Пара сил Г и Г' на плече г создает крутящий
момент М^,
который далее передается на нагрузку,
где совершает полезную работу. Сумма
сил К'
и Т"
даст силу S",
проекциями
которой на ось цилиндра и ортогональное
ей направление являются силы N'
и
Р£.
Очевидно, что /V— - N'
и
Pz=Pi-
Силы
N
и
N'
на
плече h
создают
опрокидывающий момент Monp=Nh,
который
далее передается на опоры двига-
Рис.
1.12. Силы в
КШМ:
а
— расчетная схема; б
-
зависимость сил в КШМ от угла поворота
коленчатого вала
20
теля
и уравновешивается их реакциями. Момент
Л/опр
и вызываемые
им реакции опор изменяются
по времени и могут быть
причиной
неуравновешенности
двигателя.
Соотношения
между силовыми факторами, нагружающими
эле-
менты КШМ, с учетом его геометрии
и характера действия сил:
N=Pztgf},
S=PZ(
1/cos/7),
K=PzCOS{<P+P)
cos/?
sin(<p+/n
T=Pz , Tr.
cos/?
Особо
следует отметить соотношение между
крутящим и опро-
кидывающим моментами:
Л/опр=
Nh=Pztgp
(lm
cos
/?+г
cos
ф)=pzr
sin^+^
cos/i
=
Tr=Mip.
СИЛЫ,
ДЕЙСТВУЮЩИЕ НА ШЕЙКИ КОЛЕНЧАТОГО ВАЛА
Силы,
действующие на шатунную шейку. На
шатунную шейку кривошипа действуют
сила S,
направленная
по оси шатуна, а также центробежная
сила Кпп,
действующая по радиусу кривошипа
(рис. 1.13). Результирующая сила 7?„,....
нагружающая шатунную шейку, определяется
как векторная сумма этих двух сил. Ее
зависимость от угла поворота коленчатого
вала <р
может быть представлена в виде полярной
диаграммы нагрузки на шатунную шейку
(ПДНШШ), которая является геометрическим
местом точек конца радиуса-вектора R,„
ориентированного
относительно системы координат,
связанной с кривошипом. При этом кривошип
условно полагается неподвижным,
а
ось цилиндра вращается в противоположную
сторону с той же угловой скоростью.
Такое представление не изменяет
взаимного расположения элементов КШМ
и, следовательно, значения и ориентацию
сил, действующих на них. Гак как при
неподвижном кривошипе линии действия
сил К,
Т
и К,ш
однозначно определены, то процедура
построения диаграммы сил R,„,„
значительно
упрощается. ПДНШШ дает наг- пядное
представление о значении и направлении
действия относите- иьно элементов КШМ
силы, нагружающей в данной фазе рабочего
цикла шатунную шейку, а также определяет
условную точку ее приложения.
Зависимость
модуля силы Rmjn
от
угла поворота, построенная I* прямоугольных
координатах R.„
—
(р,
далее используется для
21
в
,к
Рис.
1.13 К расчету сил, нагружающих шатунную
шейку:
а
расчетная схема; б
построение ПДНШШ; в — ПДНШШ; г —
теоретическая диаграмма
шноса
шатунной шейки
лпалюа
нагруженности шатунного подшипника.
Для этого исполь- луюгси следующие ее
параметры: R,„
,пгпяг
— при выборе материала
антифрикционного
слоя; R„mrT=—
I
Rmjnd(p
—
для расчета количе-
т
J
о 0>ж
I
^пш d(p
-чы
J
ПЛП.Ср
7СХ
J
1
ства
теплоты, выделяющейся от трения; R^
шлпср
Ч>Х-
я>и
при
расчете минимальной толщины масляного
слоя в подшипнике. Здесь т
— угловая длительность рабочего цикла;
т — коэффициент тактности; фн,
<рк
— соответственно углы начала и конца
петли максимальных нагрузок (участок
максимальных нагрузок на диаграмме,
ограниченный углами, при которых
R„m=Rm,„^).
С
учетом изложенного в1ппе метод построения
ПДНШШ сводится к следующему. В
прямоугольных координатах из полюса
О
(рис. 1.13, б),
который соответствует центру шатунной
шейки,
22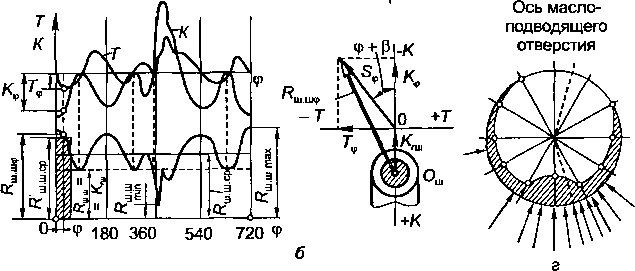
для
каждого значения ц>
на соответствующих осях наносятся
векторы сил и Tv,
результатом
геометрического суммирования которых
является сила Sv.
Концы
векторов этой силы, полученной для
множества значений (р,
последовательно соединяют плавной
кривой, в результате чего формируют ее
полярную диаграмму. Затем полюс диаграммы
О
переносится в точку Ош
в положительном направлении по оси
К
на величину центробежной силы части
массы шатуна, приведенной к кривошипу
Кги1.
Вектор, соединяющий любую точку диаграммы
с полюсом Ош,
является результирующей силой Яп,„.
Для
V-образного
двигателя вид диаграммы определяется
типом соединения шатунов с коленчатым
валом. Для двигателя с шатунами,
расположенными последовательно
на одной шатунной шейке, результирующие
силы, нагружающие соответствующие
участки шейки для каждого из шатунов,
определяются отдельно, аналогично
тому, как это выполнялось в случае
линейного двигателя. В ПДНШШ V-образного
двигателя с сочлененными
шатунами
результирующая сила Ящ_ш,
нагружающая шатунную шейку, определяется
геометрическим суммированием векторов
Лш.ш(л)
и одно
временно
действующих на шейку со стороны цилиндров
левого и правого рядов.
Силы,
нагружающие коренные шейки. Коренные
шейки кривошипа одноцилиндрового
двигателя нагружаются силой R,„=S+К,...
и центробежной силой инерции
неуравновешенных масс кривошипа К,
(рис. 1.14). Их результирующая сила
Вк=Кшлп+К.
воспринимается двумя коренными
опорами, поэтому сила, действующая на
каждую коренную шейку, равна половине
результирующей силы Rz
и
противоположно направлена:
Run=
—
0,5RX=
-0,5(S+Kra+Kr)=
-0,5(S+K,), где
К^Кпд+Кг
Это
обстоятельство позволяет для определения
нагрузки на коренные шейки одноцилиндрового
двигателя использовать 11ДНШШ,
если ее полюс перенести из точки Ош
в точку 0„
положение которой определяется
величиной отрезка ОшОх=|К,|.
В этом случае отрезок ООх
представляет собой модуль суммы векторов
К,ш
и Кг.
Уменьшив масштаб сил в 2 раза и изменив
ориентацию диаграммы Rx
на
противоположную, получим полярную
диаграмму нагрузки на коренную шейку
(ПДНКШ).
Влияние
противовеса на коренную шейку можно
учесть, при-
ожив
его инерционную результирующую силу
Кщ, к точке Ох.
23
Рис.
1.14. Построение полярной диаграммы
нагрузки на коренную шейку (шестая.
коренная
шейка шестицилиндрового четырехтактного
линейного двигателя)
Нагрузки
на коренные шейки многоцилиндрового
двигателя можно определить, представив
его в виде совокупности одоноцилинд-
ропых двигателей, кривошипы которых
вращаются синхронно и по- нерпуты друг
относительно друга на угол S,
определяемый
компоновочной схемой коленчатого
вала, а процессы в его цилиндрах сдвинуты
по фазе в соответствии с порядком работы
и углом чередования рабочих ходов. В
этом случае результирующая сила R,
шу,
действующая на j-ю
коренную опору, получается суммированием
нагружающих ее сил со стороны опирающихся
на нее кривошипов: RIJn/=0,5(Rl(,_i)+RI).
Идентификация
векторов сил, действующих одномоментно
со стороны смежных кривошипов,
реализуется сопоставлением фаз
процессов в j-м
и (/—1)-м
цилиндрах: q>j=
(pj_
i
+
(720 — 6jj^
i),
где
6jj-1—угол
запаздывания работы у'-го цилиндра
относительно (/— 1)-го.
На
рис. 1.14 приведен пример построения
полярной диаграммы нагрузки на шестую
коренную шейку шестицилиндрового
линейного двигателя. Для этого ПДНКШ
от пятого и шестого кривошипов
ориентируют друг относительно друга
в соответствии с их взаимным расположением
на коленчатом валу (в данном случае под
углом 5=120°). Полюсы Ох
обеих диаграмм совмещают. Затем
производят попарно геометрическое
суммирование векторов Ri5
и
24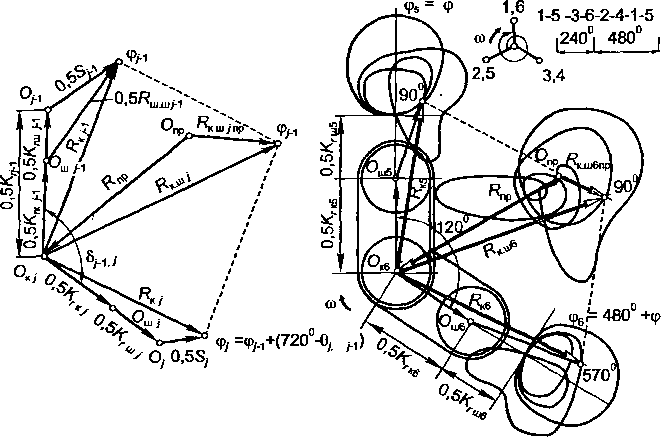
Рис.
1.15. Диаграмма нагрузок на коренную
шейку: сплошная
линяя
—
без противовесов; штриховая — с
противовесами
R-жб,
идентифицируя их по фазам рабочего
процесса: q>6=<Ps+480°.
Отсчет углов в полученной ПДНКШ ведут
по (/'— 1)-му (в данном примере по 5-му)
кривошипу.
Влияние
противовесов на нагруженность коренной
шейки показано на рис. 1.15.
ТЕОРЕТИЧЕСКАЯ
ДИАГРАММА ИЗНОСА ШЕЙКИ ВАЛА
С
использованием полярных диаграмм
строят теоретическую диаграмму износа
шейки вала (ТДИШВ). С ее помощью можно
определить место на поверхности шейки,
в котором целесообразно расположить
выход маслоподводящего канала. Построение
ТДИШВ ведется при следующих допущениях:
величина
износа шейки пропорциональна действующей
на нее силе;
износ
равномерен в пределах секторов,
опирающихся на центральные углы
60° в обе стороны от условной точки
приложения силы, что соответствует
зоне контакта вала и подшипника
в
пределах дуги 120°;
коррозионный
и эрозионный износ шейки отсутствует.
Для
построения ТДИШВ можно принять такую
последовательность действий (см.
рис. 1.13, в,
г).
1.
На поверхность шейки, изображенной в
произвольном масштабе, плоскопараллельно
с полярной диаграммы переносят силы
Кшш,
полученные через равные угловые
интервалы поворота коленчатого
вала, кратные 360° (например, 30°), так,
чтобы силы были направлены к центру
шейки.
25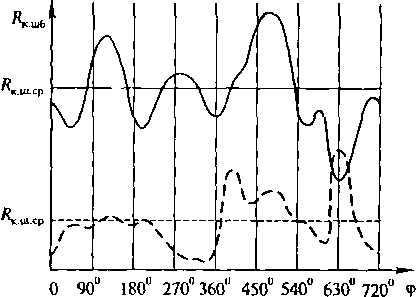
На
шейке выделяют сектор в 120°, ориентированный
своей дугой вниз, с биссектрисой угла,
совпадающей с вертикальной осью
кривошипа.
Производят
суммирование всех сил Ящ.т9»
попавших в данный сектор. С учетом
принятых допущений износ в пределах
данного сектора будет равномерным и
по величине пропорциональным полученной
сумме сил.
В
принятом масштабе (так, чтобы сумма
сил для наглядности составляла
приблизительно 1/3 радиуса шейки) на
биссектрисе угла сектора откладывают
отрезок, пропорциональный износу, от
наружной поверхности к центру
окружности шейки.
Затем
выделяют следующий сектор, повернутый
относительно предыдущего на фиксированный
угол, соответствующий принятому углу
дискретизации iC,„
(в нашем случае 30°), и повторяют операции
3 и 4. Данные действия производят
последовательно до тех пор, пока
интервал дискретизации не перекроет
всю окружность шейки.
Полученные
точки, характеризующие износ, соединяют
плавной кривой.
На
основании сформированной кривой
выбирают ось маслоподводящего
канала так, чтобы она находилась в зоне
с минимальным износом, что соответствует
минимальному удельному давлению
между подшипником и шейкой. Именно в
этой зоне возможно наименьшее перекрытие
канала поверхностью полтинника.
Необходимо
отметить, что ТДИШВ позволяет лишь
качественно описать характер износа
шейки. При выборе рационального места
расположения отверстия для масла на
шейке следует также учитывать и факторы,
влияющие на се прочность.
СУММАРНЫЙ
КРУТЯЩИЙ МОМЕНТ ДВИГАТЕЛЯ
Моменты,
скручивающие коренные шейки
многоцилиндрового двигателя. В
одноцилиндровом двигателе крутящий
момент Mtp=
=
Тг.
Так как г — величина постоянная, то
характер его изменения по углу поворота
кривошипа полностью определяется
изменением тангенциальной силы Т.
Многоцилиндровый
двигатель можно представить как
совокупность i
одноцилиндровых,
рабочие процессы в которых протекают
идентично, но сдвинуты друг относительно
друга на угловые интервалы в
соответствии с принятым порядком работы
и углом чередования рабочих ходов
двигателя. Момент, скручивающий ко- 26
ренную
шейку, может быть определен как сумма
моментов, действующих на всех
кривошипах, предшествующих ей.
В
качестве примера на рис. 1.16 представлена
схема формирования крутящих моментов
в четырехтактном (г=4) четырехцилиндровом
(i=4)
линейном
двигателе с порядком работы цилиндров
1 — 3—4—2—1. При равномерном чередовании
вспышек для данного двигателя угловой
сдвиг между последовательными рабочими
ходами составит 6=720°/i=720c/4=180°.
Фазовый
сдвиг момента между первым и третьим
кривошипами составит 180°, между первым
и четвертым — 360°, а между первым и
вторым — 540°. Как следует из приведенной
схемы, момент, скручивающий любую (>-к>)
коренную шейку,
<-1
м1Ж1='£м1=г'£
Т,.
м4
=V
Порядок
работы цилиндров 1-
3-4-2-1
е,_2=540
6Г.,=720
е
=
720
/
0 180 360 540 720 180 360 540 720 <р
,°/\ |
|
|
|
0 |
|
/S |
|
У |
|
=720° |
п ' |
|
|
|
Ч-У 0 |
Кг |
=540° |
|
/Ч |
ЧУ J |
г .л 0 |
С*4 |
- |
Ms |
=180‘ |
/Л |
I J |
Л> |
С7^ |
0^ |
г |
1 (й |
>60 Л |
Л |
Л |
|
Л |
Л |
|
о=1 eq |
|
KJ |
V |
J |
и |
\J |
|
Рис. 1.16. Схема формирования суммарного крутящего момента четырехтактного четырехцилиндрового линейного двигателя:
а — схема моментов, действую- щих на отдельных кривошипах; б — схема построения крутящего момента
27
Кривая изменения А/ЖШ1 по углу поворота кривошипа в этом случае определяется суммированием кривых сил Т, действующих на всех г— 1 кривошипах, предшествующих данной коренной шейке.
Момент, скручивающий последнюю коренную шейку, является суммарным крутящим моментом двигателя М%, который далее передается на трансмиссию. Совершаемая им работа может быть получена интегрированием Л/Е (<р) по углу поворота кривошипа <р в угловом интервале, соответствующем рабочему циклу двигателя в (6=720° для четырехтактного двигателя и 0=360° для двухтактного):
Нормирование ее по угловому интервалу длительности рабочего цикла в дает средний суммарный крутящий момент
соо гистствующий индикаторному моменту Мь развиваемому двигателем.
Моменты, скручивающие шатунные шейки многоцилиндрового двигателя. Б одноцилиндровом двигателе в результате действия суммарных сил на коренных шейках коленчатого вала возникают реакции Rk и Rt, одна из которых RT=0,5T, действующая в плоскости, перпендикулярной кривошипу, скручивает шатунную шейку. Тогда величина скручивающего момента будет равна Mm„=Rr=
Представив многоцилиндровый двигатель в виде совокупности одноцилиндровых и рассматривая только вовдействие на кривошипы тангенциальных сил, получим момент, скручивающий г-ю шатунную шейку:
в
![]()
о
в
![]()
о
=0,57г.
Мшш,=М[т i+RTr=MIMli+0,5 Тг,
где МХЛп,- — момент на г-й коренной шейке.
28
ВЛИЯНИЕ
КОНСТРУКТИВНЫХ СООТНОШЕНИЙ В КШМ НА
ПОКАЗАТЕЛИ ДВИГАТЕЛЯ
Конструкция
КШМ существенным образом влияет на
характеристики ДВС, такие, как
экономичность, габариты, масса,
долговечность и т. д. Рассмотрим
механизм влияния на параметры ДВС
основных конструктивных соотношений
в его КШМ: коэффициента Я=г//ш
и отношения K=S/D.
Отношение
радиуса кривошипа г
к длине шатуна /ш
(k=rjlщ).
Анализ влияния Я на параметры ДВС
проведен при
неизменном рабочем объеме Vh
и
диаметре цилиндра D.
В
этом случае изменение Я вызывается
только вариациями длины
шатуна. При уменьшении Я («длинный»
шатун) возрастают масса тш
и ее составляющие /Яш.,, и /Ящ.1-
При этом растет центробежная сила
инерции АГГШ;
для ее компенсации потребуется увеличение
статического момента противовесов
на продолжении щек кривошипа, что
связано с повышением материалоемкости
конструкции двигателя. Влияние снижения
Я на Pj
противоречиво:
с одной стороны, растет /я,„„
и свя- >анная с ней масса тчто
должно привести к увеличению Pj.
С
другой стороны, из-за наличия Я в
выражении, определяющем амплитуду силы
инерции второго порядка Р/п,
возможно ее уменьшение. Уменьшение
Я вызовет увеличение высоты и массы
ДВС, что связано с «удлинением» шатуна.
Более длинный шатун приводит 1акже
к уменьшению угла ^
что
вызывает уменьшение боковой силы N.
Меньшие
N
и
/? обеспечивают, при прочих равных
условиях, снижение износа в подвижных
сочленениях
цилиндропоршневой
группы.
У
современных двигателей с искровым
зажиганием (ДсИЗ) шатуны, как правило,
длиннее, чем у дизелей. Это связано с
повышенной быстроходностью первых
и превалирующим влиянием у них на Р)
второй гармоники. В дизелях из-за более
высоких максимальных тазовых нагрузок
поперечное сечение стержня шатуна
больше и уве- ничение тш„
при удлинении шатуна оказывает на Ру
большее влияние, чем уменьшение
амплитуды Pja.
Величина
Я оказывает влияние на характер износа
цилиндра. Н "жсплуатации износ
цилиндра неравномерен — больше изнашива-
с* тся та его сторона, к которой боковая
сила N
прижимает
поршень при рабочем ходе, что связано
с большим ее значением вследствие
максимальных значений РТ
на такте расширения. При введении
цсчаксажа максимальный угол отклонения
шатуна /J
при
рабочем чоде по абсолютному значению
становится меньше, чем наибольшее
отклонение при такте сжатия, что
позволяет выровнять износ цилиндра по
его периметру.
29
Необходимо
отметить, что применение «коротких»
шатунов в некоторых случаях может
усложнять компоновку двигателя, так
как из-за больших значений возможно
задевание шатуна за нижнюю часть
цилиндра или юбку поршня.
Отношение
хода поршня S
к
диаметру цилиндра D
(K=S/D).
При
неизменном
рабочем объеме двигателя УЛ
увеличение К
возможно за счет уменьшения D
при
одновременном увеличении хода поршня
S.
Выбор
рациональной для данной конструкции
двигателя величины К
в значительной мере связан с возможностью
уменьшения средней скорости поршня
сп=Sn/ЗО.
Данный параметр характеризует конструкцию
ДВС с точки зрения ее динамической и
тепловой напряженности, а также
износостойкости элементов двигателя
(особенно его цилиндропоршневой группы).
Известно, что напряжения от инерционных
нагрузок на элементы КШМ пропорциональны
с„,
а тепловая напряженность двигателя
и линейный износ деталей цилиндропоршневой
группы пропорциональны сш.
Формальный
анализ выражения, определяющего среднюю
скорость поршня, показывает, что
добиться ее снижения при неизменной
частоте вращения коленчатого вала п
можно за счет уменьшения S.
Однако,
как правило, это приводит к росту
инерционных нагрузок на элементы
КШМ. Это объясняется тем, что масса
деталей KIUM
пропорциональна
D3,
в
то время как снижение скорости норншн
вследствие уменьшения его хода
пропорционально D.
При
увеличении D
также
возрастают газовые нагрузки на КШМ,
что ciiM.iauo
с
ростом площади поршня.
Таким
образом, уменьшение К
неоднозначно влияет на долговечность
двигателя. С одной стороны, она
увеличивается из-за уменьшения сю
а с другой — уменьшается из-за возрастания
инерционных и газовых нагрузок на
детали КШМ. Какой из приведенных факторов
будет превалировать, решается
индивидуально для каждой конкретной
конструкции ДВС.
В
современных быстроходных ДсИЗ наблюдается
тенденция к использованию короткоходных
конструкций с К<
1, что позволяет получить дополнительный
резерв увеличения пжы
при неизменной сп.
В дизелях с их меньшей быстроходностью
используют более длинноходные КШМ с
К—
1Д..1 Д.
Уменьшение
К
приводит к увеличению габаритной длины
ДВС и длины коленчатого вала. При этом
уменьшается высота камеры сгорания,
что в ряде случаев усложняет получение
оптимальной ее формы. Это может приводить
к ухудшению условий протекания
30
процессов
смесеобразования и сгорания. У ДсИЗ
возрастает также вероятность возникновения
детонации. К положительным качествам
короткоходных конструкций следует
отнести снижение теплоотдачи в
стенки цилиндра, улучшение возможности
увеличения проходных сечений горловин
клапанов, обеспечение большего
перекрытия шеек коленчатого вала,
уменьшение поперечных габаритов картера
и массы ДВС.