

2.5. Жаттығулар
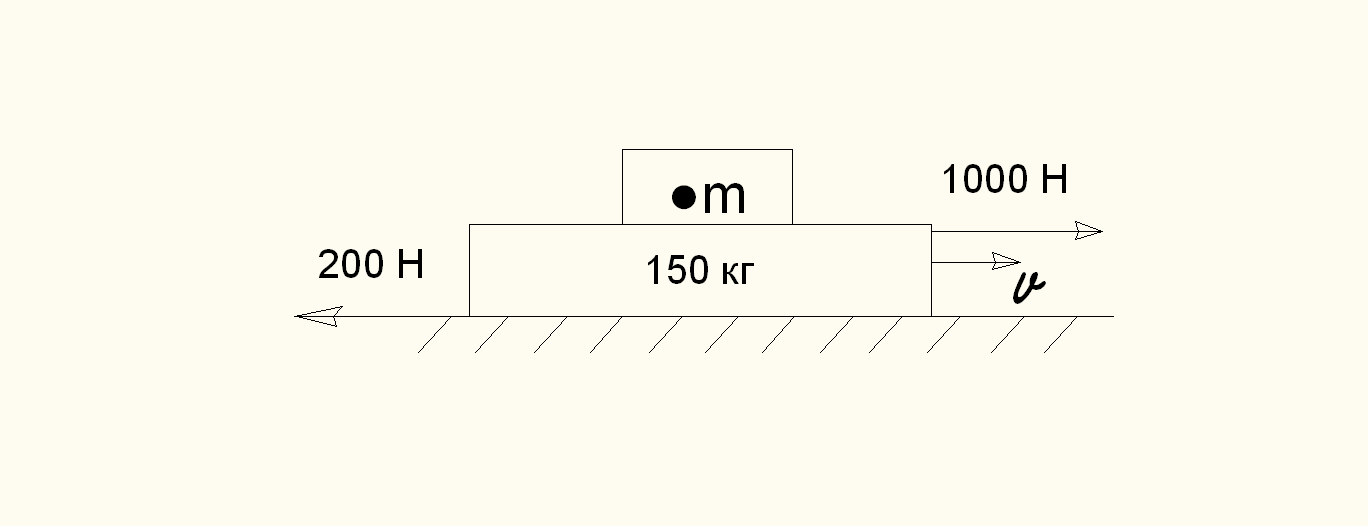
2.5.1. сызықтық жылжу үшін қозғалыс теңдеуін жазыңыз және талдаңыз.
2.5.2.
Егер
![]() болса рауалы жүктемені m анықтаңыз.
болса рауалы жүктемені m анықтаңыз.
2.5.3.
Қозғалтқыштың білігіне келтірілген
![]() және
және
![]() анықтаңыз
анықтаңыз
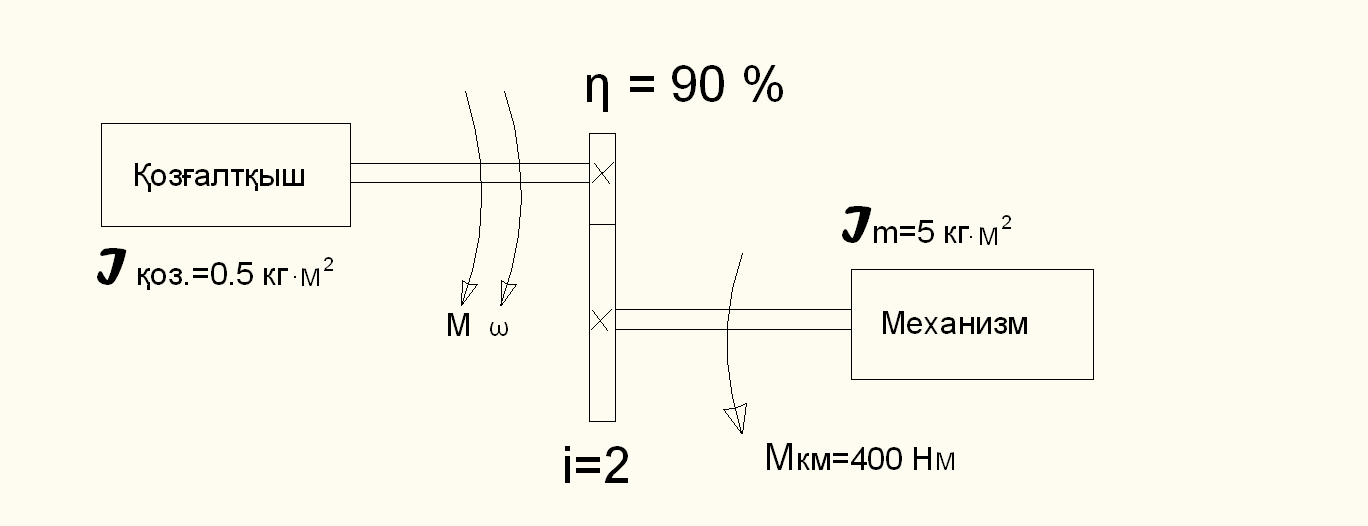
2.5.4. Қозғалтқыштың білігіне келтірілген және анықтаңыз.
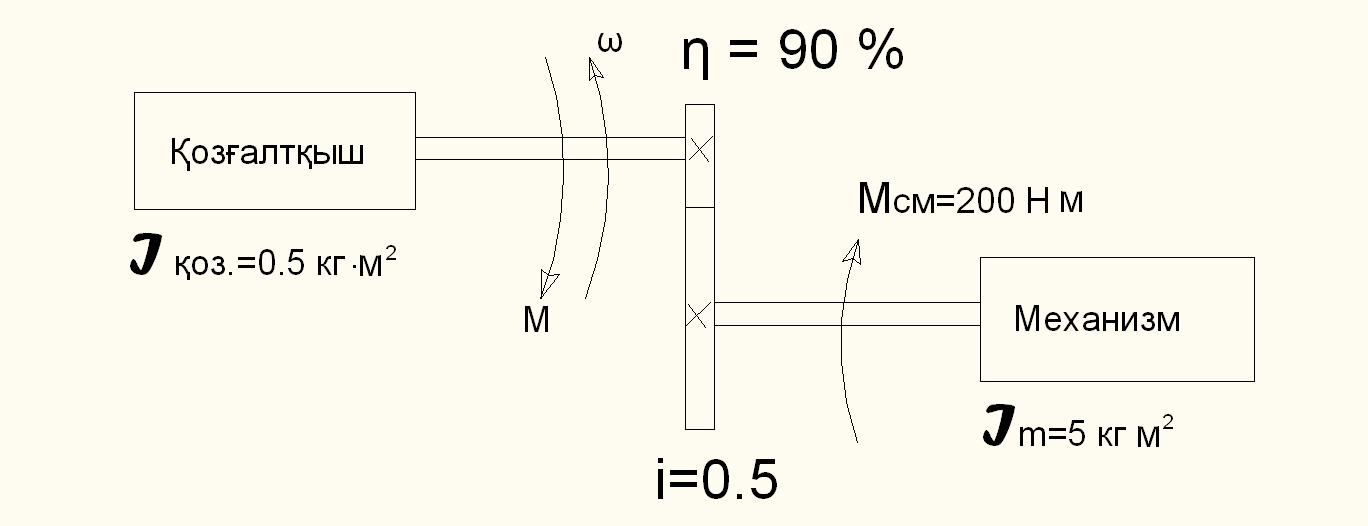
2.5.5.Алдыңғы
2.5.3. және 2.5.4. есептердің берілгені
бойынша механизмнің білігіне келтірілген
анықтаң
![]() және
және![]() анықтаңыз.
анықтаңыз.
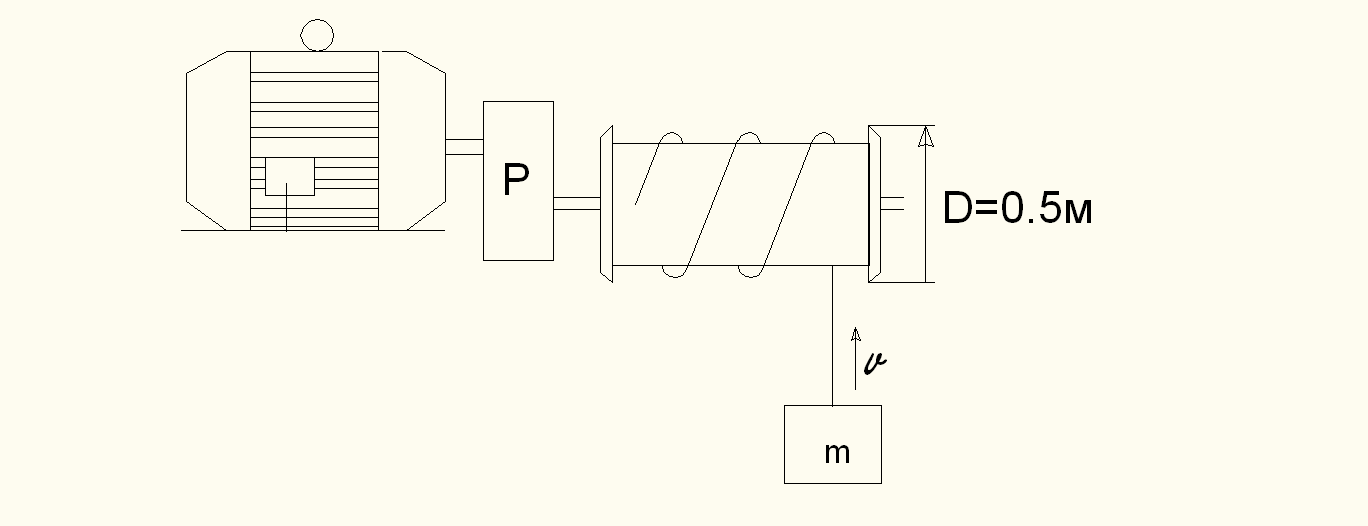
2.5.6. АИР160 84 қозғалтқышы жүкті 0,5 м/с жылдамдықпен көтеру үшін редуктордың беріліс қатынасы қандай болу керек? Егер ПӘК =0,85 болса, жүк көтергіш (жүкті көтеру - түсіру) қандай жүкпен үздіксіз жұмыс істей алады?
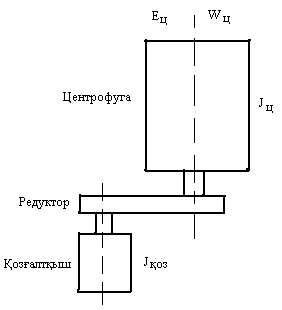
2.5.7.
А112М2
қозғалтқыш пайдаланатын центрифугаға
(Мкц=0)
максималь үдеу қамтамасыз ететін
редуктордың беріліс санын анықтаңыз,
![]() Егер
М=Мном
болса, центрифуганың жүгіріс және үдеу
уақыттарын бағалаңыз.
Егер
М=Мном
болса, центрифуганың жүгіріс және үдеу
уақыттарын бағалаңыз.
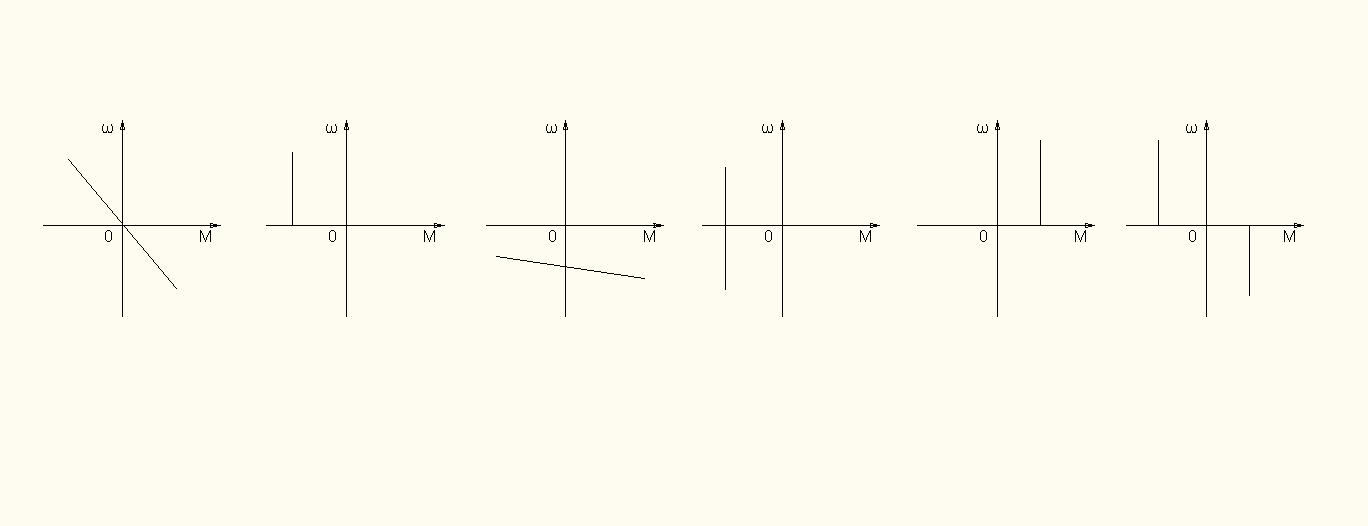
2.5.8. Моменттерді «активтік», «реактивтік», «мәліметтер аз» деп белгілеңіз. (Таңбалардың жалпы ережесі пайдаланылады )
2.5.9. Электр жетегінде қабылданған қозғалыс теңдеуінің жазылуындағы «-» таңбасы нені білдіреді
2.5.10. Асинхронды қозғалтқыштың «механикалық сипаттамасының екі бұтағы» орнықты және орнықсыз деген тұжырым қатаң ба? Оны қалай дәлірек тексереді?
2.5.11.
Қозғалыс орнықты ма
![]() ?
?

2.6. Түйін
Электр жетегінің механикалық бөлімінің негізгі моделі - жалпы білікке жалғанған қозғалтқыштың роторы, яғни түсірілген М момент және Мқ моментімен эквиваленттік жүктеме (машинаның жұмысшы бөлігі). Жалпы инерция моменті J болатын жүйе жылдамдығымен айналады.
Қозғалыс
теңдеуі
![]() екі
режимді анықтайды: қалыптасқан
(статикалық), мұнда:
екі
режимді анықтайды: қалыптасқан
(статикалық), мұнда:
![]() және
және
![]() және
өтпелі (динамикалық) Мқозғалтқышпен
жүктеменің механикалық сипаттамалары;
сипаттамалардың қатаңдығы
және
өтпелі (динамикалық) Мқозғалтқышпен
жүктеменің механикалық сипаттамалары;
сипаттамалардың қатаңдығы
![]() .
.
Таңбалар ережесі: жылдамдық таңбасы тағайындалады, қозғаушы моменттің таңбасы жылдамдық таңбасымен сәйкес, тежеуші моменттің таңбасы жылдамдықтың таңбасына қарама-қарсы.
Активтік моменттер М және Мк қозғалыс туындатады (қозғаушы) және қозғалысқа кедергі етеді (тежеуші) - қозғалтқыштың, жүктің, серіппенің және т.с.с. моменттері; олар жазықтығының төрт квадраттарында орналасады.
Реактивтік моменттер әрқашан қозғалысқа кедергі етеді, олар жазықтығының II және IV квадраттарында орналасады - үйкеліс, серпінсіз материалдардың деформациясының т.с.с. моменттері.
Механикалық
сипаттамалар қалыптасқан режимнің
![]() және
және
![]() координаттарын анықтайды - бұл ордината
өсінен шағылысқан сипаттамасымен
паттамасының
қиылысқан нүктесі. Негізгі қозғалыс
теңдеуінде шағылыс операциясын «-»
таңбасымен есепке алады.
координаттарын анықтайды - бұл ордината
өсінен шағылысқан сипаттамасымен
паттамасының
қиылысқан нүктесі. Негізгі қозғалыс
теңдеуінде шағылыс операциясын «-»
таңбасымен есепке алады.
![]() немесе
әдетте
немесе
әдетте
![]()
Механикалық сипаттамалардың түрі қозғалыстың статикалық орнықтылығын анықтайды: егер қалыптасқан режимде және орнықты нүктесімен кездейсоқ ауытқығанда жүйені қалыпты күйіне қайтаратын момент артықтау болса - жүйе орнықты.
Егер
жүктеме ротормен механикалық беріліс
арқылы байланысқан болса, онда негізгі
моделді алу үшін жүктеме моментін Мк.м
және жүктеме инерция моментін
![]() қозғалтқыштың білігіне келтіру операциясы
пайдаланылады. Бастапқы және келтірілген
жүйелерде қуат
қозғалтқыштың білігіне келтіру операциясы
пайдаланылады. Бастапқы және келтірілген
жүйелерде қуат
![]() және кинетикалық энергия
және кинетикалық энергия
![]() өзгеріссіз қалу керек. Қуат шығасы
қозғалыс тудыратын элементпен жабылады.
Моменттер мен инерция моменттерін
бастапқы жүйенің кез-келген білігіне
келтіруге болады.
өзгеріссіз қалу керек. Қуат шығасы
қозғалыс тудыратын элементпен жабылады.
Моменттер мен инерция моменттерін
бастапқы жүйенің кез-келген білігіне
келтіруге болады.
Жылдамдық,
момент, ток - электр жетектің координаттары.
Реттеу-координаттарды мәжбүрлі түрде
өзгерту, оны механикалық
немесе электрмеханикалық
![]() сипаттамалардың түрлеріне сәйкес табиғи
өзгерістермен араластыруға болмайды.
сипаттамалардың түрлеріне сәйкес табиғи
өзгерістермен араластыруға болмайды.
Координатаны реттеудің негізгі көрсеткіштері: табиғи сипаттамаға қатысты реттеу бағыты, диапазон, жатықтық, рауалы жүктеме, үнемділік, реттеуге кететін шығындар.