

2.3. Моменттер мен инерция моменттерін келтіру
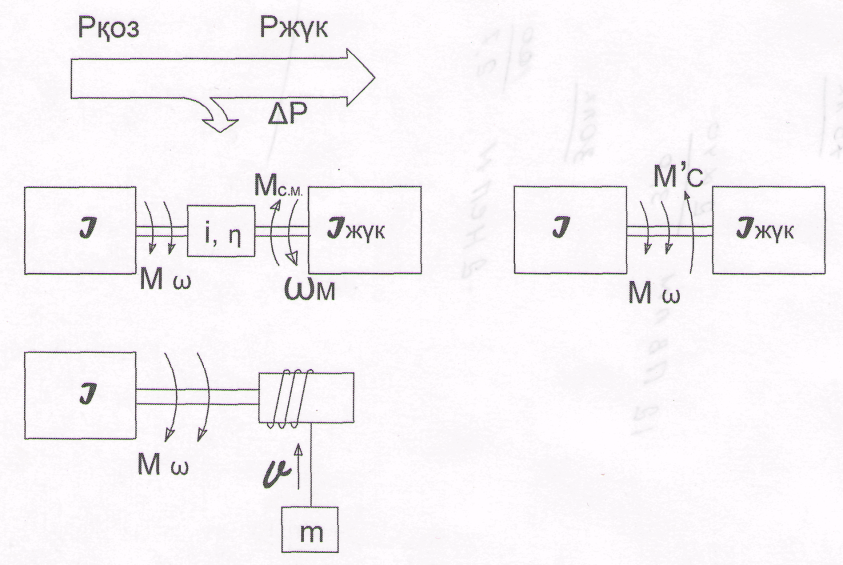
Жоғарыда пайдаланылған және пайдалы мәлімет алуға мүмкіндік берген механикалық бөлімнің қарапайым моделі (2.1-суретті қара) тікелей алғанда электр жетектердің шектеулі сандарына ғана қолданыс табады. Әдетте, қозғалтқыш пен жүктеменің арасында қандайда бір механикалық беріліс болады (1.1, 1.2-суреттерді қара), яғни өзіндік моменттерімен жылдамдықтары бар әр түрлі біліктер орналасады. Кез-келген нақты жүйені 2.1-суреттегідей қарапайым моделге келтіру үшін бірқатар операциялар орындалады. Бұл операциялар, моменттермен жылдамдықтарды негіз ретінде таңдап алынған білікке, әдетте қозғалтқыштың білігіне келтіру, моменттер мен жылдамдықтарды келтіру деп аталады. Басқаша айтқанда, әлде бір нақты механикалық жүйені, мысалы 2.6а-суретте көрсетілген жүйені эквиваленттік жүйемен (2.6б-сурет) алмастыру керек және сонда бұл алмастыру жүйенің өзгеріссіз қалған бөлімінің (мысалы-қозғалтқыштың) сипатына ықпал етпеу керек.
Келесі
ұйғарымдарды қабылдайық: жүйе қатаң,
саңлаусыз, негізгі бөліктерге қатысты
инерция моменттері өзгеріссіз, аралық
біліктерге қатынасты моменттер нөлге
тең, қозғалтқыш пен механизмнің
жылдамдықтарының қатынасы
![]() және беріліс пайдалы әсер коэффициенті
η
тұрақты шамалар.
және беріліс пайдалы әсер коэффициенті
η
тұрақты шамалар.
а б
в
2.6-сурет. Мк.м. және J жүк қозғалтқыштың білігіне келтіру көрінісі.
Нақты
және келтірілген жүктемелерде
қозғалтқыштың тудыратын қуаты өзгеріссіз
қалуы керек. Берілісте шығындар болмағанда
![]() мұнда Мкм
-
механизмнің (жүктеменің) білігіндегі
статикалық момент.
мұнда Мкм
-
механизмнің (жүктеменің) білігіндегі
статикалық момент.
Біздің жағдайда, шығасылдар қозғалтқыш тарабынан жабылғанда (М және бір бағытты)
![]() болады,
яғни
болады,
яғни
![]()
бұдан:
![]() (2.6)
(2.6)
Шығасылар қашанда болса жүйенің қозғалыс тудыратын бөлімімен жабылады, сондықтан қуат ағыны кері бағытта болғанда, яғни жүктемеден қозғалтқышқа бағытталғанда:
![]() (2.7)
(2.7)
Нақты және келтірілген жүйелерде кинетикалық энергия қоры бірдей болуы керек
немесе
![]() (2.8)
(2.8)
Бұл жерде жеңілдік үшін берілістердегі шығасыл дар ескерілмеді, әдетте егер жетектің жұмысында динамикалық режим басым орын алмаса ондай жағдай үлкен қателікке әкелмейді.
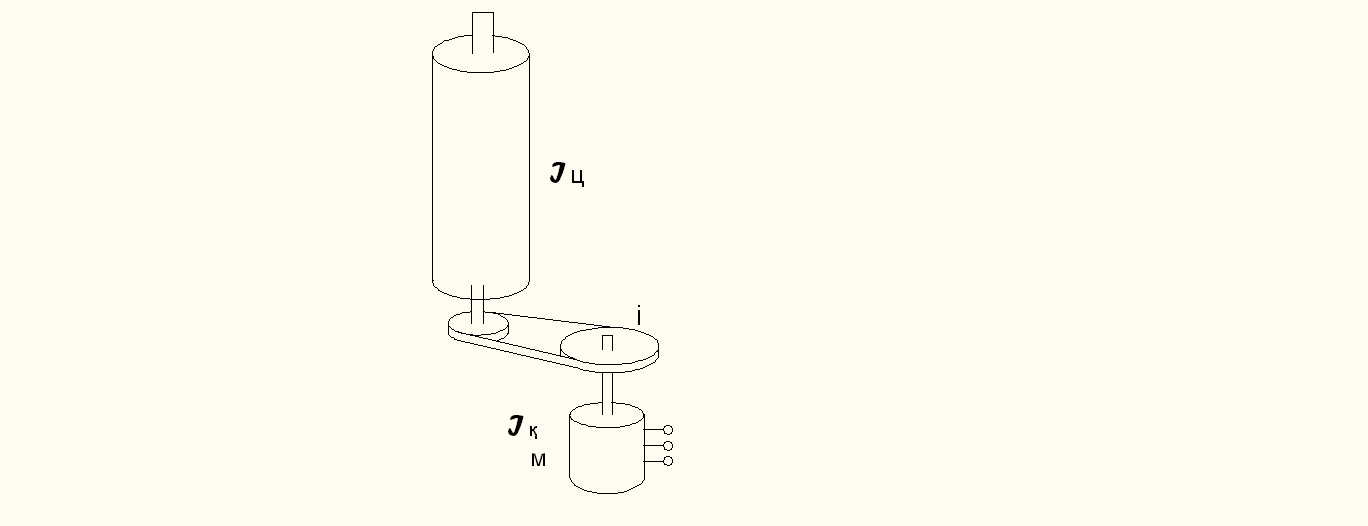
2.7-сурет. Центрифуга.
Келтіру үрдісі жүйенің бір элементі ілгерілемелік қозғалыста болғанда, мысалы жүк көтергенде (2.6в-сурет) де жүргізіледі. Мұнда, жоғарыда айтылған ереже сақталады, келтірілген элементте қуат өзгеріссіз қалады, алғашқы және келтірілген жүйелерде кинетикалық энергия қоры бірдей болу керек. Егер қозғалысты қозғалтқыш тудыратын болса:
![]() яғни
яғни
![]() (2.9)
(2.9)
мұндағы:
m
- жүк массасы; v
- жүк
көтеру жылдамдығы; g
- еркін құлау үдеуі;
![]() -
келтіру радиусы;
-
келтіру радиусы;
Кинетикалық
энергия қорларын теңестіргенде:
![]() ,
,
![]() - анықтаймыз:
- анықтаймыз:
![]() (2.10)
(2.10)
Осы
қарастырылған қарапайым моменттер мен
(күштер) инерция моменттерін (массалар)
келтіру әдістері әр түрлі практикалық
есептерді шешуге мүмкіндік береді.
Көбінде, жүктеме - технологиялық машина
немесе механизм белгілі болады, яғни
![]() және
және
![]() белгілі, ал қозғатқыш пен берілісті
берілген критерийлерге қанағаттанарлықтай
етіп таңдап алу керек.
белгілі, ал қозғатқыш пен берілісті
берілген критерийлерге қанағаттанарлықтай
етіп таңдап алу керек.
Критерийлер талабы - минималь шығасылар (ең жоғары ПӘК) немесе минималь масса, минималь құн және т.б., айтылған шектеулер көлемінде-қол жетім жабдықтар, олардың каталогтық мәліметтері болуы мүмкін. Кейде жүктеме мен қозғалтқыш белгілі болады да, қойылған технологиялық мәселені ең жақсы қамтамасыз ете алатын берілісті таңдап алу керек болады.
Мысал
үшін келесі есепті қарастыруға болады.
Инерциялық моменті Jц
белгілі, кедергі моменті мүлдем жоқ
![]() центрифуга
және Jk
, M=
const
қозғалтқыш берілген. Центрифугаға
максимал үдеу беруді қамтамасыз ететін
беріліс саны ioнт
берілісті таңдап алу керек. Яғни
центрифуга
және Jk
, M=
const
қозғалтқыш берілген. Центрифугаға
максимал үдеу беруді қамтамасыз ететін
беріліс саны ioнт
берілісті таңдап алу керек. Яғни
![]()
Центрифуга үшін қозғалыс теңдеуін (2.3) жазамыз.
![]()
Теңдеуге
жоғарыда айтылған ереже бойынша
берілістердегі шығындарды есепке алмай
центрифуганың білігіне келтірілген
![]() және
және
![]() шамаларын қойсақ:
шамаларын қойсақ:
![]() немесе
немесе
![]()
Осы өрнектен i бойынша туынды алып, оны нөлге теңей отырып іздеген iопт. анықтаймыз:
![]()
Соңғы екі өрнек қозғалтқыш-беріліс-центрифуга жүйесінің механикалық бөлімін жобалауға негіз болады.