

2.2. Механикалық сипаттамалар
(2.1) теңдеуіндегі М және моменттері уақытқа, орналасу жағдайына, жылдамдыққа тәуелді болады. Ең қызықтысы және маңыздысы М және моменттердің жылдамдықпен байланысы.
2.2-сурет. Механикалық сипаттамалардың мысалдары.
![]() тәуелділігін
қозғалтқыштың механикалық сипаттамасы,
ал
тәуелділігін
қозғалтқыштың механикалық сипаттамасы,
ал
![]() тәуелділігін жүктеменің (механизмнің)
механикалық сипаттамасы деп атайды.
Электр жетегінің статикалық және
динамикалық режимдерін талдау үшін ең
қолайлы және пайдалы аспап механикалық
сипаттамалар болып табылады.
тәуелділігін жүктеменің (механизмнің)
механикалық сипаттамасы деп атайды.
Электр жетегінің статикалық және
динамикалық режимдерін талдау үшін ең
қолайлы және пайдалы аспап механикалық
сипаттамалар болып табылады.
Моменттер мен жылдамдықтар әр түрлі таңбалы болуымен механикалық сипаттамалар жазықтығының 4 квадранттарында орналасулары мүмкін. Квадранттарды I,II,III,IV рим сандарымен белгілейді және белгілеу 2.2-суретте көрсетілгендей жоғарғы оң жақ квадранттан басталып, сағат тіліне қарсы бағытта жүргізіледі. Осы суретте асинхронды қозғалтқыштың (М) және орталықтан тебетін машинаның (Мк) механикалық сипаттамалары келтірілген.
Шамалардың таңбасын қозғалыс бағытының бірін оң деп қабылдай отырып анықтайды, мысалы сағат тілі бойынша +, немесе жоғары қарай +, және с.с.
Қозғалыс
бағыты бойынша бағытталған моменттер
(қозғаушы) жылдамдық таңбасымен бірдей
таңбаланады (қозғалтқыштың сипаттамасындағы
![]() -
идеал бос жүріс жылдамдығы; -
Мқ.т.
- қысқа тұйықталу моменті, ал қозғалыс
бағытына қарсы бағытталған моменттер
(тежеуші) жылдамдық таңбасына қарсы
таңбаланады (сипаттаманың қалған
телімі).
-
идеал бос жүріс жылдамдығы; -
Мқ.т.
- қысқа тұйықталу моменті, ал қозғалыс
бағытына қарсы бағытталған моменттер
(тежеуші) жылдамдық таңбасына қарсы
таңбаланады (сипаттаманың қалған
телімі).
Моменттерді активтік және реактивтік деп бөлу қабылданған.
Активтік моменттер қозғаушы да, тежеуші болуы мүмкін, олардың бағыты жылдамдық бағытына тәуелсіз болады, мысалы электр машинасы туғызған момент (2.2-суреттегі М), жүк туғызған момент, серіппе туғызған момент және с.с.
Тиісті механикалық сипаттамалар төрт квадранттардың кез-келгенінде орналасулары мүмкін.
Реактивтік моменттер - қозғалысқа жасалған реакция, олар қозғалысқа қашанда болсын қарсы бағытталады, яғни қашанда болсын тежеуші болады: мысалы үйкеліс күштерден туындайтын момент, ортадан тебетін машина туғызған момент (2.2-суреттегі Мк) және с.с. Олардың механикалық сипаттамалары әр қашанда екінші және төртінші квадранттарда орналасады.
Механикалық
сипаттамаларды олардың қатаңдығымен
![]() бағалау қабылданған. Олар (2.3-сурет)
абсолютті қатаң
бағалау қабылданған. Олар (2.3-сурет)
абсолютті қатаң
![]() (1), абсолютті жұмсақ (2), теріс
(1), абсолютті жұмсақ (2), теріс
![]() (3) немесе оң
(3) немесе оң
![]() (4) қатаңдықты болады.
(4) қатаңдықты болады.
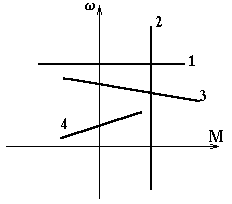
2.3-сурет. Әр түрлі қатаңдықты механикалық сипаттамалар.
Бірге қарастырылып отырған қозғалтқыш пен жүктеменің механикалық сипаттамалары қалыптасқан режимдегі (статикалық режимдегі) жылдамдықпен қал моменттің Мқал координаторларын өте оңай табуға мүмкіндік береді. Нақтысында, егер жылдамдық осі бойынша салыстырмалы Мк сипаттамасын айнадай шағылыстырса (2.4а-сурет), онда шағылысқан Мк қисығымен қозғалтқыштың М сипаттамасының қиылысқан А нүктесі қалыптасқан режимді анықтайды. Олай болуы, М+(-М)=0 немесе М=0 шарты орындалады, АВ және ВС кескінділері тең болады.
а, б,
2.4-сурет. Қалыптасқан режимді анықтау.
Мұндағы оңай байқалатын жағдай, бір ғана операцияның орындалғаны – Мк екінші квадранттан бірінші квадрантқа ауыстырылуы. Егер қозғалыс теңдеуін (2.1) келесі түрде (2.2) жазатын болсақ, бұл операцияны жоюға болады:
![]() (2.2)
(2.2)
мұндағы
![]() алдындағы «-» таңбасы жүктеме сипаттамасын
айна шағылысындай ауыстырғанды білдіреді
(2.4б-сурет)
алдындағы «-» таңбасы жүктеме сипаттамасын
айна шағылысындай ауыстырғанды білдіреді
(2.4б-сурет)
Бұл
әдіс электр жетегінде дәстүрлі түрде
пайдаланылады, яғни жалпы, әрине дұрыс
(2.1) өрнегінің орнына түрлендірілген
(2.2) өрнегін қолданады, бұл тек қолайлы
әдіс екенін, сондай-ақ М және
![]() сипаттамаларының жай қиылысында
қалыптасқан режим орнауын есте сақтайды.
сипаттамаларының жай қиылысында
қалыптасқан режим орнауын есте сақтайды.
Әрі
қарай,
![]() сипаттамасы
әр қашан ордината осімен шағылысқан
түрде тұрғызылады, «
сипаттамасы
әр қашан ордината осімен шағылысқан
түрде тұрғызылады, «![]() »
таңбалары қойылмайды, ал қозғалыс
теңдеуі келесі түрде жазылады.
»
таңбалары қойылмайды, ал қозғалыс
теңдеуі келесі түрде жазылады.
(2.3)
Қалыптасқан режимнің координаталары ωқал. және Мқал. қарастырылып отырған уақыт сәтіндегі машинаның білігіндегі қуатты анықтайды.
![]() (2.4)
(2.4)
Қуат оң болуы мүмкін, яғни машинаның білігінен механизмге беріледі (қозғалтқыштық режим) немесе теріс болады, яғни машинаның механизмнен алған қуаты, мұнда машинаның моменті және жылдамдығы әр түрлі таңбалы болады (тежеу режимі).
Егер,
әлде-бір уақыт аралығында tц
жұмыстық нүкте
![]() жазықтығында бірнеше орындар алатын
болса, яғни электр жетегі бірнеше
қалыптасқан режимдерде істеген болса,
жүктемеге берілген (оң) немесе жүктемеден
алынған (теріс) механикалық энергияны
төмендегі өрнекпен анықтауға болады.
жазықтығында бірнеше орындар алатын
болса, яғни электр жетегі бірнеше
қалыптасқан режимдерде істеген болса,
жүктемеге берілген (оң) немесе жүктемеден
алынған (теріс) механикалық энергияны
төмендегі өрнекпен анықтауға болады.
![]() (2.5)
(2.5)
Мұнда «қал» индексі қойылмаған, өйткені қалыптасқан режимдер қаншама көп болуы мүмкін және P(t) - уақыттың кез-келген функциясы.
Қозғалтқыш пен жүктеменің механикалық сипаттамалары қалыптасқан режим статикалық орнықты бола алатынын анықтауға мүмкіндік береді, яғни кез-келген кездейсоқ ауытқу әрекетінен кейін жүйе бастапқы статикалық қалпына орала ма-(2.5.а,-суреті), немесе оралмай ма-(2.5.б- суреті) анықтауға болады.
а, б,
2.5-сурет. Статикалық орнықтылықты анықтау.
Бірінші
жағдайда (2.5а-суреті), кез-келген кездейсоқ
ауытқу, мысалы жылдамдықтың төмендеуі
![]() қозғаушы моменттің М
тежеуші моменттен Мк
артық
болуымен бірге жүреді және тепе-теңдік
қайта қалыптасады, жүйе бастапқы қалпына
қайтып оралады. Екінші жағдайда
(2.5б-сурет) дәл сондай жылдамдықтың
кездейсоқ төмендеуі тежеуші моменттің
артылуына әкеледі де тепе-теңдік қайта
қалыптаспайды, жүйе статикалық орнықсыз
болып табылады.
қозғаушы моменттің М
тежеуші моменттен Мк
артық
болуымен бірге жүреді және тепе-теңдік
қайта қалыптасады, жүйе бастапқы қалпына
қайтып оралады. Екінші жағдайда
(2.5б-сурет) дәл сондай жылдамдықтың
кездейсоқ төмендеуі тежеуші моменттің
артылуына әкеледі де тепе-теңдік қайта
қалыптаспайды, жүйе статикалық орнықсыз
болып табылады.
Механикалық сипаттамалар электр жетегі динамикасының көптеген есептерін шешкенде маңызды және тиімді құрал болады.