

5.2. Якорь тоғы бойынша қатаң оң кері байланыспен бұрыштық жылдамдықты автоматты реттеу жүйесі
Жүйенің құрылымдық сұлбасы 5.3-суретте келтірілген.
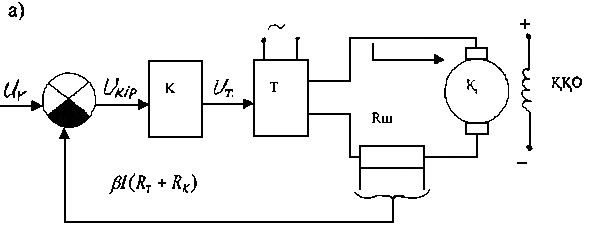
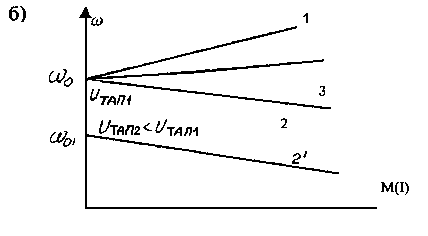
5.3-сурет. Құрылымдық сұлба (а) және қозғалтқыштың сипаттамалары (б).
Күшейткіштің кірісіндегі сигнал кернеулерінің қосындысымен белгіленеді:
Uкір = Uтап + I (R1+RK), (5.4)
=![]() (5.5)
(5.5)
(4.1) сияқты теңдеулер жүйесін алып, сәйкес түрлендірулерді өткізіп, тұйықталған жүйенің механикалық сипаттамасының теңдеуін табуға болады:
![]() ,
(5.6)
,
(5.6)
Егер де күшейткіш пен түрлендіргіштің күшейту коэффициенттері тұрақты деп есептесек, онда қозғалтқыштың сипаттамалары тура сызық болады. (4.5) теңдеудің бірінші мүшесі Uтап тапсырылған кернеуге пропорционалды өте оңды бос жүріс режиміндегі бұрыштық жылдамдықты белгілейді (2 және 2´ сипаттамалардағы ω0 және ω0 нүктелер).
Статизмді анықтау үшін (4.5) теңдеудің оң жағындағы екінші мүшесін (Мном кезде) бірінші мүшесіне бөлу керек:
s=![]() ,
(5.7)
,
(5.7)
Егер
де
![]()
![]() =1
болса,
онда
=0
болады
(сипаттама 3)
егер де
1
болса,
оңда сипаттама ұлғайған сызық болады
(сипаттама 1),
егер де
1 болса,
онда сипаттама төмен түсетін сызық
болады (сипаттама 2).
=1
болса,
онда
=0
болады
(сипаттама 3)
егер де
1
болса,
оңда сипаттама ұлғайған сызық болады
(сипаттама 1),
егер де
1 болса,
онда сипаттама төмен түсетін сызық
болады (сипаттама 2).
5.3. Қозғалтқыштың бұрыштық жылдамдығы бойынша қатаң теріс байланыспен бұрыштық жылдамдықты автоматты түрде реттеу жүйесі
Біліктегі жүктеме өскен кезде қозғалтқыштың айналу жиілігі төмендейді, ал сонымен ТГ-дың, қозғалтқышпен бір білікте орналасқан, сигналы төмендейді.
ТГ-дың якорінен алынатын кернеу қозғалтқыштың бұрыштық айналу жиілігіне пропорционалды. Тапсырылған сигнал бұл кезде тұрақты болғандықтан, К күшейткіштің кірісіндегі сигнал үлкейеді, ал сондықтан Т түрлендіргіштің ЭҚК-і үлкейеді, жетегінің бұрыштық жылдамдығының құлауын автоматты түрде компенсациялайды.
Жүйенің құрылымдық сұлбасы 5.4-суретте көрсетілген.
Сұлба үшін теңдеулердің жүйесін құрайық:
Uкір = Uтап –j , Ет = kс Uкір
Uк =Eк + I Rк , Uқ =Eт - IRт
Ек = с , М=сI (5.8)
мұнда: j=Uк.б. / - жылдамдық бойынша кері байланыстың беріліс коэффициенті.
Сәйкестелген түрлендірулерден кейін тұйықталған реттеу жүйесіндегі механикалық сипаттамасына арналған теңдеуді аламыз:
=![]() ,
(5.9)
,
(5.9)
мұнда: k=kc /с - барлық жүйенің беріліс (күшейту) коэффициенті;
Rя =Rт+Rқ
Беріліс коэффициент К тұрақты кезде қозғалтқыштың сипаттамалары тура сызықты. Оң жақтың бірінші мүшесі қозғалтқыштың идеальді бос жүрісінің бұрыштық жылдамдығын, ал екінші мүше - жүктеме моментінің өзгеруімен пайда болған бұрыштық жылдамдықтың құлауын анықтайды.
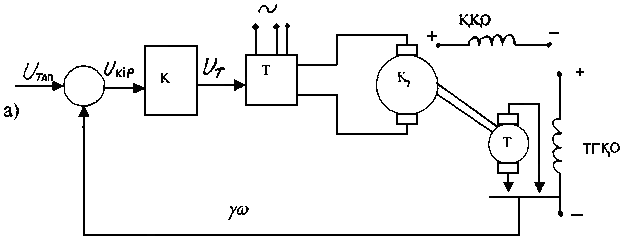
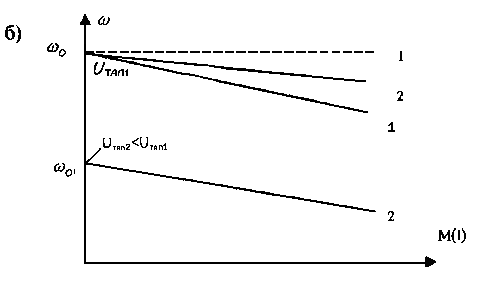
5.4.-сурет. Құрылымдық сұлба (а) және қозғалтқыштың сипаттамалары (б).
5.4
суретте көрсетілген:
k![]() кезеңдегі
сипаттама ІГ-ның
шеткі шамасы бар кезіндегі 2
және 2'
сипаттамалар;
ажыратылған жүйенің сипаттамасы 3.
Күшейту коэффициентінің шамасы үлкен
кезде дәлдеп, түзету құрылғыларды немесе
тұрақтандыру кері байланыстарды (әдетте
теріс иілгіш) кіргізу қажет болады, ал
олар жүйені орнықты қылады және өтпелі
үрдістердің сапалары керекті болуын
қамтамасыз етеді. Жоғарыда қаралған
жүйелердің ең үлкен реттеу диапазоны
200:1.
кезеңдегі
сипаттама ІГ-ның
шеткі шамасы бар кезіндегі 2
және 2'
сипаттамалар;
ажыратылған жүйенің сипаттамасы 3.
Күшейту коэффициентінің шамасы үлкен
кезде дәлдеп, түзету құрылғыларды немесе
тұрақтандыру кері байланыстарды (әдетте
теріс иілгіш) кіргізу қажет болады, ал
олар жүйені орнықты қылады және өтпелі
үрдістердің сапалары керекті болуын
қамтамасыз етеді. Жоғарыда қаралған
жүйелердің ең үлкен реттеу диапазоны
200:1.
Бұл реттеу жүйенің статизмін (M=Mном кезде) мына формула бойынша анықтайды:
= ,
(5.10)
,
(5.10)