

4.6. Синхронды қозғалтқыштың механикалық және бұрыштық сипаттамалары
ω0
=
![]() = const
= const
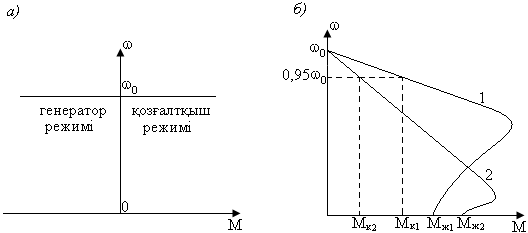
4.15- сурет. Механикалық (а) және жүргізіп жіберу (б) сипаттамалары.
Синхронды қозғалтқыштың (СҚ) роторында жұмысшы орамасынан басқа тұрақты токтан қоректенетін, арнайы жүргізіп жіберу орамасы болады. Осы ораманың көмегімен қозғалтқыш асинхрондық қозғалтқыш сияқты жүргізіледі, сондықтан қозғалту режимдерінде асинхрондық сипаттамаға ұқсайды. Жүргізу ораманың кедергісі үлкен болса, онда жіберу моменті де жоғары болады. Қоздыру орамасын тұрақты токқа қосқаннан кейін қозғалтқыш синхрондыққа енеді.
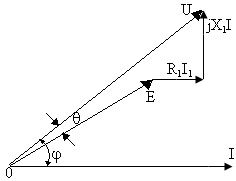
4.16-сурет. СҚ-тың векторлық диаграммасы.
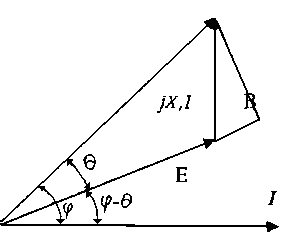
4.17-сурет. R0 = 0 кезіндегі СҚ-тың векторлық диаграммасы.
СҚ-тың активтік қуаты:
Р = 3UІcosφ (4.31)
Қозғалтқыштың тұрақты жұмыс істеуін қарастырсақ, моменттің М ЭҚК пен кернеу арасындағы θ бұрышынан тәуелді екенін білу керек. СҚ-тың моментінің θ бұрыштан тәуелділігін бұрыштық сипаттама деп атайды, яғни М = ƒ(θ).
Векторлық диаграммадан (4.17-сурет) шығады:
U cosφ = E cos(φ-θ
АВС үш бұрышынан көрінетіні:
Cos ( φ-θ) = AB / AC = Usinθ /IX1
U
cosφ
= EU
![]()
Бұл табылған көріністі (4.31) қойсақ, онда шығатыны:
Р
=
![]() (4.32)
(4.32)
Ал электрмагниттік моменттің теңдеуі
М
=
![]() (4.33)
(4.33)
Бұрыш = 90 болса, момент максималды болады:
Ммакс
=![]() яғни,
M=
Ммаксsin
(4.35)
яғни,
M=
Ммаксsin
(4.35)
ном =25°-30.
=
![]()
2-2,5.
2-2,5.
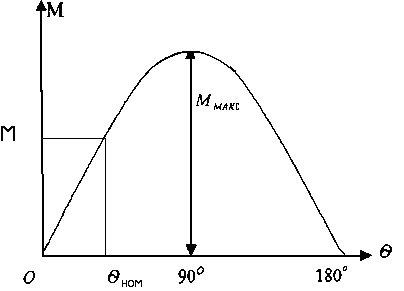
4.18-сурет. СҚ-тың бұрыштық сипаттамасы.
4.7.Айнымалы ток электр жетектерінің бұрыштық жылдамдығын реттеу
Айнымалы ток қозғалтқыштардың кеңінен қолдану себебі - олардың тұрақты ток қозғалтқыштарға қарағанда арзандылығы, қарапайымдылығы, сенімділігінің жоғарғылау болғандығы және салмағы мен габаритінің аздығы. Сонымен қатар, бұрыштық жылдамдықты реттеудің кейбір тәсілдері арнайы түрлендіргіш құралдарды қажет қылмайды.
Асинхронды қозғалтқыштың бұрыштық жылдамдығын реттейтін тәсілдердің ең көп қолданылатын түрлері:
а) реостаттық реттеу;
б) полюстер санын өзгерту;
в) қоректендірілетін кернеудің жиілігін өзгерту;
г) басқа машиналармен және түрлендіргіштермен асинхронды қозғалтқышты каскадқа қосу.
4.7.1.Реостаттық және импульстік реттеу
Тұрақты ток қозғалтқыштары сияқты ротор тізбегіне резисторды қосу арқылы бұрыштық жылдамдықты реттеуге болады. Реттеу негізгі бұрыштық жылдамдықтан төмен болады.
Егер де механикалық сипаттаманың бөлігін сызықты деп есептесек, онда реостаттық сипаттаманың қаттылық коэффиценті
![]() ,
(4.36)
,
(4.36)
мұнда: sном.р -номинал моментке сәйкес реостаттық сипаттамадағы сырғанау.
Егер де реттеу диапазоны мынаған тең деп есептесек,
![]() (4.37)
(4.37)
онда,
![]()
Неғұрлым реттеуші резистордың сатылары көп болса, соғұрлым реттеудің ырғақтылығы жоғары болады.
Өзін-өзі салқындататын фазалы роторы бар АҚ-тың рұқсат етілетін моменті бұрыштық жылдамдығы азайған кезде мына теңдеумен анықталады:
![]() (4.38)
(4.38)
Қозғалтқьштың тұрақты шығындары (статор мен ротордың өзекшелеріндегі шығындар, механикалық және сейілу өрістерімен тудырылатын шығындар) жүктемеге тәуелді емес.
Ауыспалы шығындардың (статор мен ротордың орамаларындағы шығыңдары) мынаған тең:
![]() (4.39)
(4.39)
мұнда: sт –табиғи сипаттамадағы сырғанау.
Сонымен, жүктеме моменті тұрақты кезінде ротор тізбегіндегі шығындар тайғанауға пропорционал, ал статор тізбегіндегі шығындар тайғанауға тәуелді емес.
Негізгі қуат резисторда реттеуде жоғалады. Мысалы, егер де қозғалтқыштың жылдамдығы номинал жылдамдыққа қарағанда екі есе азайса, онда желіден тұтынатан қуаттың жартысы реттеу резисторларында жоғалады.
Реостаттық реттеудің кемшіліктері:
а) жылдамдық реттеудің сатылығы, ал бұл жағдай бекітілген автоматты басқару жүйелерді қолдануға жағдай туғызбайды;
б) жылдамдықтың аздығы;
в) энергияның үлкен шығындары.
Бірақ өзінің қарапайымдылығының арқасында реостаттық реттеу дағдылы қолданылуы орын алып отыр, мысалы кіші немесе орташа қуатты (100 кВт-қа дейінгі) сораптардың, желдеткіштердің, көтеру-тасымалдау құралдардың жетегінде қолданылады. Статордың немесе ротордың тізбектеріне резисторларды кіргізу арқылы ырғақты сатысыз бұрыштық жылдамдықты реттеу автоматтандырылған ЭЖ-терде жүктеме момент өзгерген кезде берілген бұрыштық жылдамдықты тұрақты ұстауға немесе ЭЖ-нің тоқтау алдында жылдамдықты алдын ала төмендетуге қолданатын импульстік параметрлік реттеуді іске асыруға болады.
Қосымша кернеулерді статор тізбегінде (барлық үш фазада) импульстік реттеудің АҚ-ты қосу сұлбасы 4.19а-суретте, ал әр түрлі қуыстылық кездегі механикалық сипаттамалар 4.19б-суретте көрсетілген.
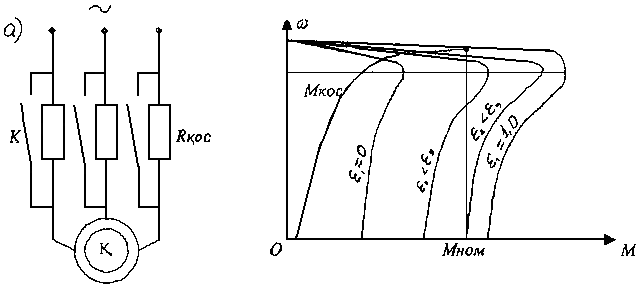
4.19-сурет. Роторы қысқа тұйықталған АҚ импульстік параметрлік реттеу кездегі басқару сұлбасы (а) және механикалық сипаттамалар (б).
ε =1 кезде (екі жаққа өткізетін жартылай өткізгіш немесе түйіспелі кілттер К-үздіксіз бекітілген) қозғалтқыш резистор Rқос тұрақты қосылуына сәйкес жасанды сипаттамада жұмыс істейді (кілттер К ажыратылған).
Статордың активтік кедергісі өскен кезде максималды моменттің және критикалық тайғанаудың, механикалық қаттылық коэффициенттің және бұрыштық жылдамдықтың тұрақтылығының азаюы шығады.
Егер де фазалы роторы бар қозғалтқышты қолдансақ, онда қозғалтқыштың пайдалануы дұрысталады. Бұл жағдайда бұрыштық жылдамдықты реттеу салдарынан туатын қосымша шығындар машина сыртындағы қосымша резисторларда бөлініп шығады, сондықтан тәуелсіз желденетін қозғалтқыштың рұқсат етілетін моменті номиналды моментке тең болады. Импулъстік параметрлік жылдамдықты реттеу кезіндегі фазалы роторы бар АҚ-тың қосу сұлбасы 4.20-суретте көрсетілген.
Қосымша резистор Rқос түзеткіш Т арқылы ротор тізбегіне тегістеуші реактор L-мен тізбектеп қосылады. Резистор К кілт арқылы (түйіспелі немесе тиристорлы) мезгіл-мезгіл қосылып және ажыратылып тұрады.
Кілт К бекітілген кезде (ε =1) қозғалтқыш Rэ=0 сәйкес сипаттамада жұмыс істейді, ал кілт К ажыратылған кезде (ε =1) және RЭ=R кезде қозғалтқыш реостаттық сипаттамада жұмыс істейді. Жұмыс зонасы екі сипаттаманың арасында жатады.
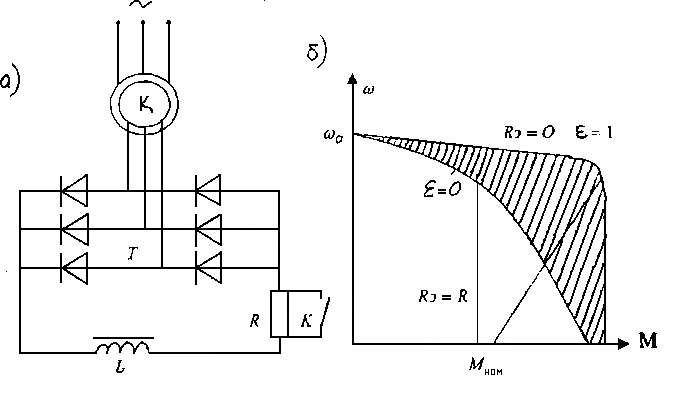
4.20-сурет. Фазалы роторы бар АҚ импульстік параметрлік реттеу кезіндегі басқару сұлбасы (а) және механикалық сипаттамалары (б)