

4.3.3. Жүктелген кездегі процестер
Білікті
жүктеген кезде
![]() ;
және 0
жылдамдықтарының айырмашылығын
сырғанаумен сипаттайды.
;
және 0
жылдамдықтарының айырмашылығын
сырғанаумен сипаттайды.
![]() (4.10)
(4.10)
Енді
ротордың тізбегінде электрмагниттік
индукция заңына сәйкес
ЭҚК
![]() пайда болады:
пайда болады:
=E1s (4.11)
Мұнда және әрі қарай штрихпен келтірілген шамалар белгіленеді, олар статордың және ротордың орамаларының бірдей еместігін ескереді. Шыққан ЭҚК-інің жиілігі:
f2=f1s (4.12)
Кедергісі R2 және индуктивтілігі L2 ротордың тізбегінде ток I2 келесідей анықталады:
немесе қарапайым түрлендірулерден кейін
 ,
(4.13)
,
(4.13)
мұндағы Х2 – f1 жиілігі кезіндегі екінші ретті ораманың шашырауының индуктивті кедергісі.
Асинхронды қозғалтқыштың фаза алмастыру дәстүрлі сызбасына сәйкес теңдеуді алдық (4.5-сурет), онда статордың да шама-шарттары R1 және Х1 ескерілген. Бұл қарапайым модель арқылы орныққан режимдерді симметриялы қоректенілетін симметриялы қозғалтқыш кезінде талдауға болады.
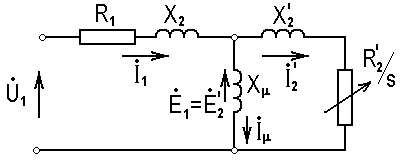
4.5-сурет. Асинхронды қозғалтқыштың алмастыру сұлбасы.
4.3.4. Энергетикалық режимдер
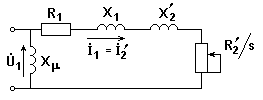
Механикалық сипаттаманы алу үшін, электр машиналар курсында жиі пайданылатын, магниттеу контурын қыспақтарға шығаратын моделді қарастырады (4.6а-сурет).
 а)
а)
б)
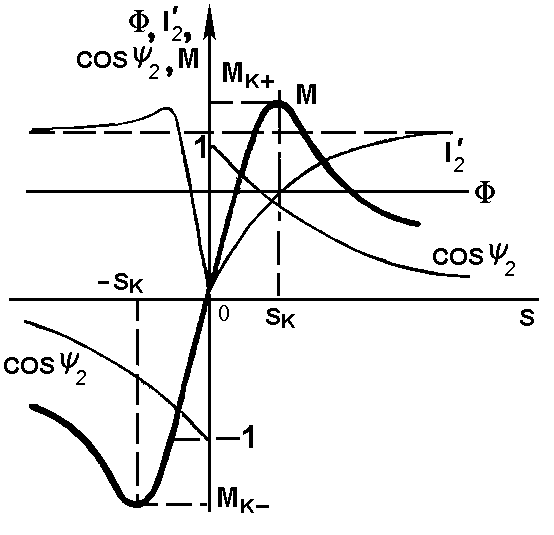
4.6-сурет. Асинхронды машинаның қарапайым
алмастыру сұлбасы (а) және сипаттамалары (б).
![]() болғандықтан,
болғандықтан,
мұндағы
I2а
–
ротор тогының активті құраушысы, 2
–
![]() және
және
![]() арасындағы бұрыш.
арасындағы бұрыш.
М(s) механикалық сипаттама туралы түсінікті үш көбейткіштің әрқайсысының s-ке тәуелділігін бақылау арқылы алуға болады.
Магнит
ағыны Ф
бірінші жақындауда (4.4)-ке сәйкес s-ке
тәуелді емес (4.6б-сурет). s=0
кезінде ротордың тогы (4.8) нөлге тең және
s
кезінде асимптотикалық түрде
![]() қатынасына ұмтылады (4.6,б-сурет). Алмастыру
сұлбасы арқылы соңғы көбейткішті
анықтауға болады:
қатынасына ұмтылады (4.6,б-сурет). Алмастыру
сұлбасы арқылы соңғы көбейткішті
анықтауға болады:
 ;
(4.14)
;
(4.14)
s
аз
шама болғанда cos2
мәні 1-ге
жақын және s
болғанда асимптотикалық түрде нөлге
ұмтылады. Үш көбейткіштің көбейтіндісі
ретінде момент s
= 0
кезінде нөлге тең (=0
–
идеалды бос жүріс), оң Мк+
және теріс Мк-
максимумдарына – критикалық мәндеріне
![]() сырғанаудың критикалық мәдері кезінде
жетеді, одан кейін үшінші көбейткіш
арқылы нөлге ұмтылады.
сырғанаудың критикалық мәдері кезінде
жетеді, одан кейін үшінші көбейткіш
арқылы нөлге ұмтылады.
Механикалық сипаттаманың теңдеуін механикалық және электрлік шамалар арқылы берілетін ротордың тізбегіндегі шығасыларды теңестіру арқылы алуға болады. Желіден тұтынатын қуат, R1-дегі шығасыларды ескермегенде, электрмагниттік қуатпен шамалас болады:
![]() ,
,
Біліктегі қуат келесідей анықталады:
![]() .
.
Ротордың тізбегіндегі шығасы:
![]() (4.15)
(4.15)
немесе электрлік шамалармен берілгенде:
![]() ,
,
осыдан:
![]() .
.
Соңғы өрнекке (4.8)-ден I2 қойып, және М=f(s) функциясының экстремумын және оған сәйкес Мк және sк тауып, келесі теңдеуді аламыз:
 (4.16)
(4.16)
мұндағы а=R1/R2:
 (4.17)
(4.17)
 (4.18)
(4.18)
Практикада кейде а=0 деп алады, яғни статор орамаларының активті кедергісін ескермейді. Бұл әдетте Рн >5кВт болғанда елеулі қателіктерге әкелмейді, бірақ бұл аз қуаттарда моделді нашарлата алады. а=0 кезінде (4.16) - (4.17) өрнектері келесідей түрге ие болады:
 (4.19)
(4.19)
![]() (4.20)
(4.20)
![]() ,
(4.21)
,
(4.21)
мұндағы Хк = Х1+Х2’ – машинаның шашырау индуктивті кедергісі.
(4.16) теңдеуінде, s<<sк кезінде, бөлімінде бірінші мүшені ескермеуге болады және жұмыс учаскесінде механикалық сипаттаманы келесі түрде алуға болады:
![]() .
(4.22)
.
(4.22)
4.6б-суреті
және (4.16) және (4.17) өрнектері бойынша
асинхронды қозғалтқыштың механикалық
сипаттамасының қатаңдығы айнымалы
болса, жұмыс учаскесінде
![]() ,
ал ssкр
кезінде – оң болады.
,
ал ssкр
кезінде – оң болады.
Асинхронды электр жетегі тұрақты ток электр жетегі сияқты, тұрақты ток электр жетегіндегі энергия ағынының таралуымен, қозғалтқыштық және үш тежелу режимінде жұмыс істей алады (4.7-сурет).
4.7-сурет. Асинхронды электр жетегінің энергетикалық режимдері.
Рекуперативті тежеу (р.т.) қозғалтқыш активті моментпен 0 жылдамдығымен айналған кезде болады. жылдамдығымен ротор айналғанда өрістің 0 айналу жылдамдығын азайтса, онда рекуперативті режим болады. Бұл жерде активті моменттің ролін айналатын ротордың инерциялық массаларының моменті атқарады.
Кері қосылумен тежелуді (к-қ.т.) алу үшін екі фазасын орындарымен айырбастау қажет (4.8-сурет). Бұл кезде өрістің айналу бағыты өзгереді, машина кері қосу режимінде тежеледі, одан кейін реверстеледі (кері айналады).
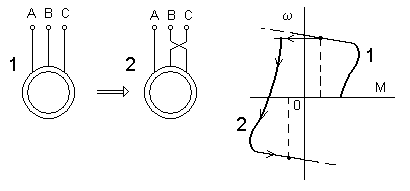
4.8-сурет. Асинхронды қозғалтқыштың реверсі.
Динамикалық тежеу режимі ерекше болып табылады. Бұл режим желіден ажыратылған айнымалы ток асинхронды қозғалтқыштың генераторлық режимі болып табылады, қозғалтқыштың статорына Iт тұрақты ток берілген. Бұл режим бірқатар жағдайларда қолданылады, ол кезде қозғалтқыш желіден ажыратылғаннан кейін реверссіз жылдам тоқтатылуы қажет.
Статордың орамасына берілетін тұрақты ток кеңістікте қозғалмайтын өрісті тудырады. Ротор айналғанда оның орамасында айнымалы ЭҚК пайда болады, оның әсерінен айнымалы ток өтеді.
Статордың және ротордың өрістері қосылып, нәтижелік өрісті береді, нәтижесінде бұл өріспен ротор тогының әсерлесуінен тежелу моменті пайда болады. Қозғалтқыштың білігінен келетін энергия бұл кезде ротор тізбегінің кедергілерінде таралады.
Динамикалық тежеу режимінде статордың өрісі қозғалмайды, сырғанау келесі түрде жазылады:
![]()
және келесі өрнектер (4.16) - (4.18) механикалық сипаттамалар үшін орындалады:
 (4.23)
(4.23)
 ,
(4.24)
,
(4.24)
мұндағы:
![]() - статор орамалары жұлдызша жалғанғанда
- статор орамалары жұлдызша жалғанғанда
және
![]() статор орамалары үшбұрышша жалғанғанда;
статор орамалары үшбұрышша жалғанғанда;
![]() (4.25)
(4.25)
Қанықпаған
машина кезінде
![]() болғандықтан, динамикалық тежеу
режиміндегі sк.т
критикалық сырғанау sк
сырғанауынан елеулі аз болады.
болғандықтан, динамикалық тежеу
режиміндегі sк.т
критикалық сырғанау sк
сырғанауынан елеулі аз болады.