

3.11. Тәуелсіз қоздырылатын тұрақты ток қозғалтқыштың якорін шунттау тәсілі арқылы бұрыштық жылдамдығын реттеу
![]() (3.43)
(3.43)
![]() (3.44)
(3.44)
![]() (3.45)
(3.45)
Сәйкестендіруші түрлендіруді өткізгеннен кейін табамыз:
![]() (3.46)
(3.46)
![]() деп
алайық.
деп
алайық.
(3.46) теңдеудің сол және оң жағын С=kФ-ке бөлеміз және А мәнін қойғаннан кейін электрмеханикалық сипаттаманың теңдеуін табамыз:
![]() (3.47)
(3.47)
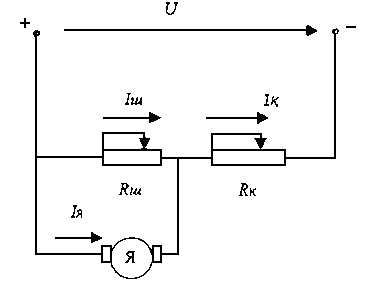
3.33-сурет. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының якорь орамасын шунттау сұлбасы.
Қозғалтқыштың механикалық сипаттамасының теңдеуі:
![]() (3.48)
(3.48)
Егер
де
![]() болса,
онда ортақ нүктесі А бар топтас
сипаттамалары 3.34-суретте көрсетілген.
болса,
онда ортақ нүктесі А бар топтас
сипаттамалары 3.34-суретте көрсетілген.
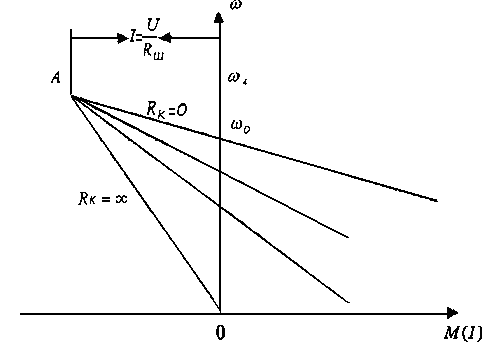
3.34-сурет. Шунттық резистор Rш тұрақты, ал тізбектегі резисторды Rк өзгертіп тұрған кездегі топтас механикалық сипаттамалары.
Сипаттамалардың қиылысқан нүктесі А тізбекті резистор арқылы ток өтпейтін жағдайға сәйкес. Бұл якорьдің бұрыштық жылдамдығы идеал бос жүрістің бұрыштық жылдамдығынан үлкен болған кезде, яғни а > 0 , мүмкін болады.
Ал бұл жағдай якорьдің ЭҚК-і желінің кернеуін және якорь тізбегінің ішкі кернеу құлауын толық теңгергенде болады, яғни:
![]() (3.49)
(3.49)
Бұл жағдайда қозғалтқыш динамикалық тежелу режимінде сыртқы резистор Rш-қа жұмыс істейді. Якорьдің кернеуі нөлге тең болғандыктан, Iя якорь тоғы
![]() (3.50)
(3.50)
(3.49) тендеуді (3.50) тендеуге қойып және Е мен U-ды оларға пропорционал o және А мәндеріне ауыстырылып А нүктедегі бұрыштық жылдамдықты табамыз:
![]() (3.51)
(3.51)
Егер де Rк = 0 болса, онда якорь кернеуі Rш тәуелді емес және якорь тоғы өзгерген кезде тұрақты болып қалады, сол себептен Rк = 0 кезі табиғи сипаттамаға сәйкес.
Егер де Rк = болса, онда қозғалтқыш желіден қоректенбейді де сыртқы резистор Rш -қа динамикалық тежеу режимінде жұмыс істейді, ал сипаттама координата басынан өтеді. Rк-ның басқа мәні кезінде сипаттамалар осы екі сипаттаманың арасында жатады.
Егер де Rк = cоnst, ал Rш = var болса, онда топтас сипаттамалар 3.35-суретте көрсетілген.
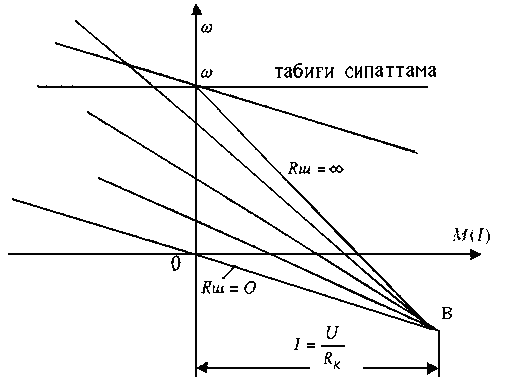
3.35-сурет. Тізбекті резистор Rк тұрақты, ал шунттық резистор Rш өзгеріп тұрған кездегі топтас механикалық сипттамалар.
Бұл топтас сипаттамалар шунттық резистордың кедергісі якорь тоғына әсер етпейтін ортақ нүктесі В бар. Бұл жағдайды тек белгілі теріс бұрыштық жылдамдығы кезінде орындауға болады, яғни:
![]() (3.52)
(3.52)
Бұл жағдай кезінде Rш кедергісі қандай да болсын ток өткізбейді, себебі якорьдің щеткаларының арасындағы потенциалдар айырмасы нөлге тең.
Қозғалтқыш тұтынатын тоғы:
![]() (3.53)
(3.53)
В нүктедегі бұрыштық жылдамдықты (3.52) теңдеуге Ія токтың мәнін қойып және Е-мен U-дың мәндерін в және 0 мәндерімен алмастырып табуға болады, яғни:
![]() (3.54)
(3.54)
Rк тұрақты, ал Rш өзгеріп тұрған кезде шеткі жағдайларда 3.35-суретте қалың сызықпен көрсетілген екі сипаттаманы табамыз.
Егер де Rш = 0 болса, онда қозғалтқыш динамикалық тежеу режимінде жұмыс істейді, ал сипаттама табиғи сипаттамаға параллель болады.
Егер де Rш = болса, онда шунттық резистор ажыратылғандай болады, ал қозғалтқыш резистор Rқ бар реостаттық сипаттамада жұмыс істейді. Rш -ның аралық мәндері кезінде қалған сипаттамалар көрсетілген екі сипаттаманың арасында жатады.