

2.2. Динамическая модель регулятора.
ПИ – регулятор частоты вращения Р13Н
В ПИ - регуляторе все отклонения регулируемой величины вызывают пропорционально - интегральным перемещением регулирующего органа. Устойчивость работы регулятора зависит от жесткости пружин чувствительных элементов и увеличение ее улучшает устойчивость регулятора.
1. Сравнивающее устройство
Исходное
уравнение 
Операторное
уравнение

Передаточная функция Wcy = 1 ;Wooc = δp
2. Элемент сравнения
Исходное
уравнение

Операторное
уравнение

Передаточная функция WЭC= 1
3.Усилитель
Исходное
уравнение

Операторное
уравнение

Передаточная функция Wy = kУ
4.Исполнительный механизм
Исходное
уравнение

Операторное
уравнение

Передаточная
функция
5. ГОС
Исходное
уравнение

Операторное
уравнение

Передаточная
функция
6.ЖОС
Исходное
уравнение

Операторное
уравнение

Передаточная функция Wжос = kос
7.Регулирующий орган
Исходное
уравнение

Операторное
уравнение

Передаточная функцияWpo = kро

Рис. 4 Структурная схема регулятора
Теперь примем, на основе данных книг, начальные параметры регулятора: Тим = 15 с; Ку = 1; Кро = 1; Кос = 0,1;Ти = 2 с; Ки = 0,1; Тд = 1с; Кд = 1;
2.3. Структурная схема сар.
Средствами электронного пакета «VisSim» формируем три графические характеристики регулирующего органа с замедляющимся, линейным и ускоряющимся увеличением расхода.
Вычертим структурную схему разомкнутой САР последовательно соединяя регулятор, регулирующий орган и объект регулирования. Преобразуем её в структурную схему замкнутой САР путем замыкания главной обратной связи (датчик).


Рис. 5 Структурная схема разомкнутой САР


Рис. 6 Структурная схема замкнутой САР

Рис. 7График переходных процессов

Рис. 8 Модель САР при замедляющемся, линейном и ускоряющемся увеличении расхода
2.4 Расчет опн регулятора.
Путем изменения параметров настройки регулятора получим режим автоколебаний на электронной модели замкнутой САР в среде «VisSim». Зафиксируем критическое значение коэффициента усиления регулятора и период колебаний. Рассчитаем оптимальные параметры настройки регулятора.
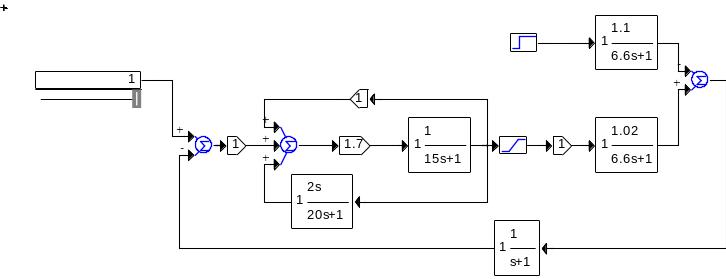


Рис. 9 Незатухающие колебания при критическом коэффициенте усиления
Предельный коэффициент усиления, К =1,7; период незатухающих колебаний, Т0 = 38 секунд.
Теперь рассчитаем оптимальные коэффициенты:
ПИ:Крег=0.45 КТи=То/1,2
Таблица 2. Оптимальные коэффициенты усиления для регулятора
-
Параметры при незатухающих колебаниях
К - коэффициент усиления регулятора
То – период колебаний, сек
Оптимальные параметры настройки регулятора
Закон регулирования
Крег
Ти
Тд
1,7
38
ПИ
0,7
31
0