

2.2 Пересечение поверхности плоскостью (из-1)
При выполнении первого индивидуального задания необходимо определить проекции линии пересечения поверхности плоскостью и построить полученное сечение. Для выполнения задания необходимо увеличить эскиз с рис. 1 «Индивидуального задания» в 3 – 3,5 раза на лист чертежной бумаги формата А3 (предпочтительно вертикального расположения). Пример дан в приложении А. К чертежу задания ИЗ-1 необходимо приложить листок, где в письменной форме кратко изложить формулировку задачи и план ее решения (можно в алгоритмической записи).
Для определения проекций линии пересечения поверхности плоскостью можно воспользоваться одним из способов: методом вспомогательных секущих плоскостей, проводя их через ребра геометрической фигуры (метод ребер) или методом замены плоскостей проекций.
Метод вспомогательных секущих плоскостей. Суть этого метода заключается в определении точки пересечения каждого ребра заданной гранной поверхности (пирамиды, призмы) или нескольких образующих линейчатой поверхности вращения (конуса, наклонного цилиндра) с плоскостью (задача на определение точки пересечения прямой общего положения с плоскостью общего положения, см. рис. 5 и 6). Соединив последовательно полученные точки пересечения на соответствующих проекциях с учетом видимости, получаем проекции искомой линии пересечения поверхности и плоскости. На рис. 7 приведен пример применения этого метода для решения задачи на нахождение проекций линии пересечения наклонной призмы плоскостью (f h) - КLF(K1L1F1, K2L2F2).

Рис. 7
Метод замены плоскостей проекций. Суть применения этого метода заключается в преобразовании системы плоскостей проекций так, чтобы заданная секущая плоскость общего положения стала проецирующей плоскостью в новой системе плоскостей проекций (см. рис. 3). Точки пересечения ребер поверхности или образующих линейчатой поверхности вращения с заданной секущей плоскостью однозначно определяются на новой плоскости проекций. По проекциям точек F4, E4 и R4 с учетом принадлежности геометрических элементов (точка F принадлежит ребру SC пирамиды, точка E – ребру SA, точка R – ребру SB) по линиям связи строятся проекции F1, E1 и R1, а затем проекции F2, E2 и R2. Целесообразно делать проверку, а именно: F4Fx1 = F2Fx; E4Ex1 = E2Ex и R4Rx1 = R2Rx. Полученные проекции точек пересечения соединить последовательно с учетом видимости линии, определить видимость поверхности (рис. 8).
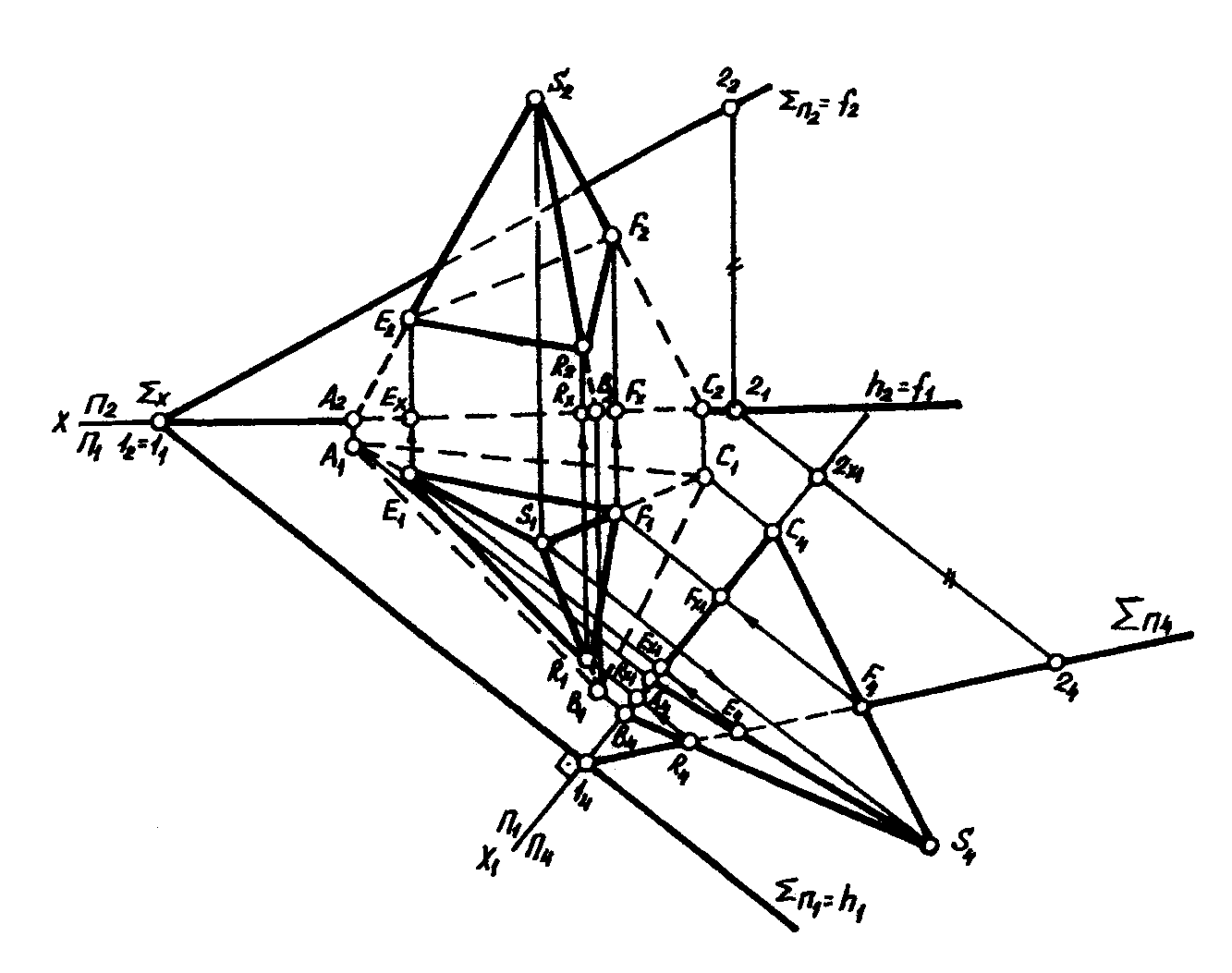
Рис. 8
Для определения натурального вида сечения трехгранной наклонной пирамиды плоскостью можно воспользоваться способом замены плоскостей проекций (см. рис. 4 и приложение А).
2.3 Взаимное пересечение поверхностей
2.3.1 Метод вспомогательных секущих плоскостей
На рис. 9 показано построение линии пересечения поверхностей вращения (конуса и сферы).
Сначала определяются опорные точки линии пересечения: с помощью фронтальной плоскости уровня Ф (след ФП1), которая пересекает обе поверхности по их очеркам (по окружности f(f1, f2) и 1S2(11S121, 12S222) - отмечаются проекции точек А(А2), В(В2): f2(S2 – 22)=A2(B2). Достраиваются горизонтальные проекции точек А(А1), В(В1): A2A1(B2B1)f1=A1(B1). Эти опорные точки являются наивысшей А и наинизшей В точками линии пересечения, а также точками видимости линии на плоскости П2.
Далее определяются точки видимости линии относительно горизонтальной плоскости П1, которые находятся путем введения вспомогательной секущей горизонтальной плоскости уровня Г1, проходящей по экватору сферы h(h1,h2). Эта плоскость пересекает конус по окружности радиуса R – параллель h1(h11,h21). На пересечении h(h1,h2) и h1(h11,h21) определяются проекции точек С и D: h1 h11 = C1(D1); C1C2 h2(h21) = C2(D2).

Рис. 9
Промежуточные точки линии пересечения определяются путем введения вспомогательных секущих горизонтальных плоскостей уровня в интервале между точками А и В. При пересечении любой вспомогательной плоскости с заданными поверхностями получаются соответствующие окружности, на пересечении которых и находятся искомые точки линии пересечения. Например, с помощью плоскости Г2 определяются проекции точек М и N (M1 и N1), с помощью плоскости Г3 определяются проекции точек E и F (Е1 и F1). Последовательно соединяя проекции точек C1, N1, A1, M1 и D1 (видимая часть проекции линии пересечения), а также D1, E1, B1, F1 и C1 (невидимая часть проекции) изображается горизонтальная проекция линии пересечения заданных поверхностей.
Фронтальную проекцию линии пересечения строим по свойству принадлежности найденных точек соответствующим вспомогательным секущим плоскостям. Фронтальные проекции точек С и D принадлежат плоскости Г1, т.е. С2 Г21 и D2 Г21. Аналогично определяются фронтальные проекции точек М и N (M2 Г22; N2 Г22), а также точек Е и F (E2 Г23 и F2 Г23).
Если в условии задачи дан частный случай, когда образующие одной из пересекающихся поверхностей перпендикулярны плоскости проекций, то на этой плоскости проекций линия пересечения совпадает с очерком заданной проецирующей поверхности. Задача сведется к нахождению второй проекции линии пересечения, используя свойство принадлежности точек линии пересечения второй пересекающейся поверхности. На рис. 10 приведен пример построения линии пересечения конуса и цилиндра, образующие которого перпендикулярны плоскости П2. Опорными точками линии пересечения являются точки А(А1,А2) и В(В1,В2). Фронтальная проекция линии пересечения определена – совпадает с очерком цилиндра, горизонтальную проекцию строим с помощью вспомогательных секущих горизонтальных плоскостей уровня. В пересечении конуса со вспомогательными секущими плоскостями получаются окружности, в пересечении с цилиндром – прямоугольники. Точки видимости линии относительно плоскости П1 определяются путем введения вспомогательной секущей плоскости Г1, проходящей по оси симметрии цилиндра. Плоскость Г1 пересекает конус по окружности радиуса R1, цилиндр – по прямоугольнику n(n1,n2), на пересечении окружности и n(n1,n2) определяются точки С(С1) и D(D1). Построение промежуточных точек: с помощью вспомогательной плоскости Г2 получаются точки К(К1) и N(N1): Г2 пересекает конус по окружности радиуса R2 и цилиндр по прямоугольнику m(m1,m2), на пересечении получаются искомые точки. Для более точного построения задается несколько вспомогательных секущих плоскостей.
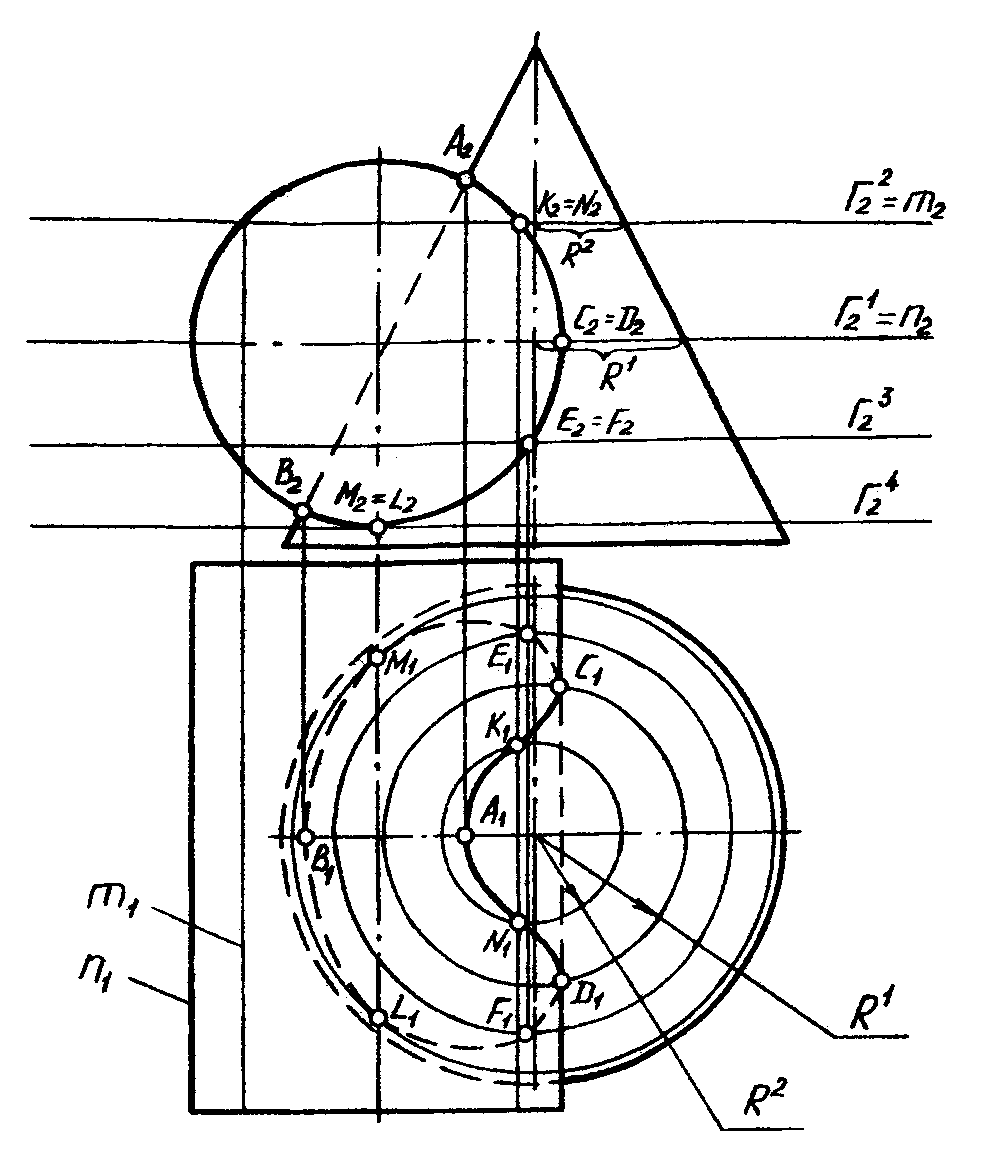
Рис. 10