Теоретическая механика. Теория, задания и примеры решения задач (Б.Е.Ермаков)
.pdf330
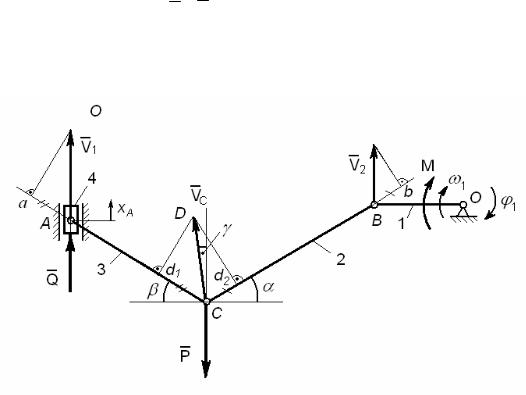
Запишем систему уравнений для второго участка:
|
|
|
|
|
|
v2 |
= P cos(ϕ +ϕ1) + N; |
|
|
|
|
|
m |
R |
|
||
|
|
|
|
|
|
|
(7) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m dv = P sin(ϕ +ϕ ) − Nf. |
|
|||
|
|
|
|
|
|
dt |
1 |
|
|
|
|
|
|
|
|
|
|
В системе (7), исключая N, запишем |
|
|||||||
|
|
dv |
+ f |
v 2 |
= g sin(ϕ +ϕ ) + gf cos(ϕ +ϕ ); |
|||
|
|
dt |
|
R |
|
|
1 |
1 |
|
|
|
|
|
|
|
||
а при z = |
v2 |
будем иметь |
|
|
||||
R |
|
|
||||||
|
|
|
|
|
|
|
|
|
z′ + 2fz = 2g sin(ϕ +ϕ1) + 2gf cos(ϕ +ϕ1) |
или |
|||||||
z′ + 2fz = g(2cosϕ1 − 2f sinϕ1)sinϕ + g(2sinϕ1 + 2f cosϕ1)cosϕ.
В окончательном виде |
|
|
|
|
z′ + 0,2z =11,6 sinϕ +15,9cosϕ. |
(8) |
|||
Решение (8) будет: z = z + z , |
где z =C e−0,2ϕ , |
|
||
1 |
2 |
1 |
1 |
|
а z2 =C2 sinϕ +C3 cosϕ ; |
z2′ |
=C2 cosϕ −C3 sinϕ . |
|
|
Тогда |
|
|
|
|
C2 cosϕ −C3 sinϕ + 0,2C2 sinϕ + 0,2C3 cosϕ =11,6sinϕ +15,9cosϕ .
Составляем систему уравнений для определения C2 и C3:
C2 + 0,2C3 =15,9 ,
0,2C2 −C3 =11,6 .
Решая полученную систему уравнений, находим:
|
C =17,5м/ с2 ; |
C = −8,1м/ с2 . |
|
|
|
2 |
3 |
|
|
Тогда |
z = C e−0,2ϕ +17,5 sinϕ −8,1cosϕ. |
|
|
|
|
1 |
|
|
|
Для начальных условий ϕ0 = 0; |
z(ϕ0 ) = v12 |
= 6,76 м/ с2 |
; |
|
|
|
R |
|
|

|
|
331 |
|
находим C =14,9 м/ с2 . |
|
||
1 |
|
|
|
Квадрат скорости на втором участке как функция параметра ϕ |
|
||
|
|
v2 =14,9e−0,2ϕ +17,5 sinϕ −8,1cosϕ. |
(9) |
Из (7) находим реакцию нормального давления: |
|
||
N = m |
v2 |
− mg cos(ϕ +ϕ ), а с учетом (9) получим: |
|
|
|
||
|
R |
1 |
|
|
|
|
|
N =14,9e−0,2ϕ + 24,8 sinϕ −14,6cosϕ.
Определим угол ϕ2, при котором реакция нормального давления во второй раз будет равна нулю.
Составим программу для N(ϕ2) = 0.
|
ϕ2 := 3 |
|
|
given |
|
14,9e−0,2ϕ2 |
+ 24,8sinϕ2 −14,6cosϕ2 = 0 |
|
|
z := minerr(ϕ2 ) |
|
z = 3,913; |
ϕ2 = 3,913 |
рад = 224,2D. |
Определим скорость в этой точке по формуле (9).
v22 =14,9e−0,2 3,913 +17,5sin224,2D −8,1cos224,2D = 0,41м2 / с2.
Тогда, v2 = 0,64 м/ с при N(ϕ2) = 0.
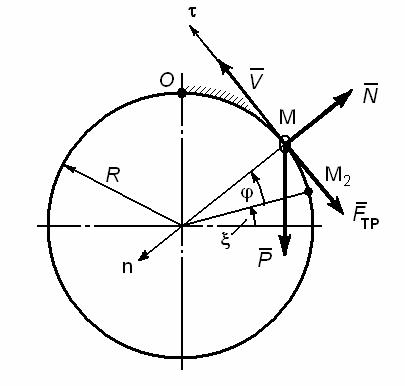
Третий участок
При угле больше 224,2О реакция N меняет направление, и поэтому следует рассмотреть третий участок (рис. 196).
Третий участок начинается от точки M2, где
ξ = ϕ1 + ϕ2 − 270D = 48,2D + 224,2D − 270D = 2,4D.
Запишем два уравнения в естественных осях координат:
|
v2 |
= P cos(ϕ +ξ) − N, |
m |
R |
|
|
|
|
|
dv |
|
|
= P sin(ϕ +ξ) −Nf. |
|
m |
dt |
|
|
|
332
|
|
Рис 196 |
|
В полученной системе, исключая N, запишем |
|
||
|
z′ − 0,2z = 9,8 sinψ −1,96cosψ, |
(10) |
|
где |
z = z(ϕ); ψ = ϕ +ξ; |
dψ = dϕ. |
|
Решение (10) будет в виде: z = z1 + z2, |
|
||
где |
z1 = C1e0,2ϕ; z2 = C2 sinψ +C3 cosψ; z2′ = C2 cosψ −C3 sinψ. |
||
После подстановки z2 и z2′ в (10) получим:
C2 cosψ −C3 sinψ −0,2C2 sinψ − 0,2C3 cosψ = 9,8 sinψ −1,96cosψ.
Из полученного тождества составляем систему двух уравнений:
C2 − 0,2C3 = −1,96,
0,2C2 +C3 = −9,8.
Решая систему, находим: C = −3,77 м/ с2; |
C = −9,05 м/ с2. |
2 |
3 |
Тогда, z = C1e0,2ϕ − 3,77 sin(ϕ +ξ) − 9,05cos(ϕ +ξ).
|
|
|
|
333 |
|
|
Используя |
начальные |
условия на третьем |
участке - ϕo = 0; |
|||
z(ϕo ) = |
v22 |
= 0,41м/ с |
2 |
; ξ = 0,0419рад = 2,4 |
D |
|
R |
|
|
, находим: |
|||
|
|
|
|
|
|
|
C1 = 0,41+ 3,77 sin2,4D + 9,05cos2,4D = 9,61м/ с2.
Окончательно запишем квадрат скорости точки на этом участке: v2 = 9,61e0,2ϕ − 3,77 sin(ϕ + 2,4D) −9,05cos(ϕ + 2,4D). (11)
Когда v(ϕ3 ) = 0 , то будет мгновенная остановка колечка на окружности. При этом нужно выражение (11) приравнять нулю и отно-
сительно ϕ3 решить трансцендентное уравнение. Программа для решения трансцендентного уравнения
будет иметь вид:
ϕ3 := 2 given
9,61e0,2ϕ3 − 3,77sin(ϕ3 + 0,0419) −9,05cos(ϕ3 + 0,0419) = 0 z := minerr(ϕ3 )
z = 0,149; ϕ3 = 0,149 рад = 8,54D.
Следовательно, колечко пройдет по окружности, не меняя направления скорости до мгновенной остановки при угле
α = ϕ1 +ϕ2 +ϕ3 = 48,2D + 224,2D + 8,54D = 280,94D 4,9 рад.
Длина дуги окружности при этом составит S = αR = 4,9 м.
В дальнейшем, после мгновенной остановки, колечко начнет обратное движение, так как
tg(360D − 280,94D) = tg(79,06D) = 5,17 >f = 0,1.
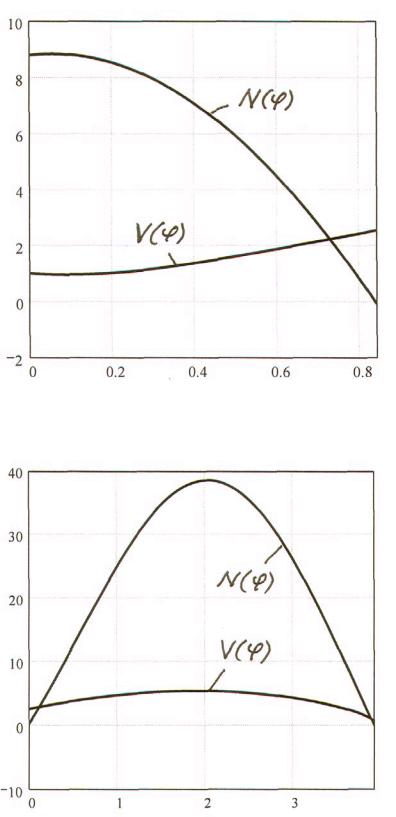
Изменение скорости и реакции нормального давления в зависимости от угла ϕ для первого и второго участков показаны на рис. 197.
334
Первый участок
Второй участок
Рис. 197

335
Приложение 2. Элементы новизны в аналитической механике
Все существующие выводы дифференциальных уравнений движения (как голономных, так и неголономных) механических систем базируются на принципе Даламбера с использованием возмущения (δt = 0)движения точек системы при помощи их возможных пере-
мещений δrk или возможных скоростей δvk , или возможных ускоре-
ний δak .
Уравнение Лагранжа второго рода
Одним из основных уравнений в аналитической механике является уравнение Лагранжа.
Рассмотрим уравнение Лагранжа второго рода для голономных механических систем:
d |
|
∂T |
− |
∂T |
= Q |
(i = |
|
), |
|
|
|
1, s |
(1) |
||||||||
|
|
|
||||||||
dt ∂qi |
|
i |
|
|
|
|
||||
∂qi |
|
|
|
|
||||||
где T =T (qi ,qi ,t) - кинетическая энергия механической системы;
Q |
= |
(δAk )i |
- обобщенная сила; |
|
|||
i |
|
δqi |
|
|
|
|
s – число степеней свободы механической системы.
Пусть задана голономная механическая система с идеальными и склерономными связями так, что кинетическая энергия этой системы будет являться функцией только обобщенных скоростей –
T =T (q |
,q |
2 |
,...,q |
s |
). |
|
|
|
|
|
||
|
1 |
|
|
|
|
|
|
|
|
|
||
|
∂T |
|
|
|
|
|
d ∂T |
|
∂T |
|||
Тогда для уравнения (1) |
|
= 0, |
|
|
|
|
|
= |
|
. |
||
∂ |
|
|
∂ |
∂ |
||||||||
|
qi |
|
|
|
|
|
dt qi |
|
qi |
|||
336
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂rk |
, |
но для механической системы |
||||||||||||||
|
|
Обобщенная сила Qi = ∑Fk |
|||||||||||||||||||||||||||
∂q |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
i |
|
|
|
|
|
|
|||||||
со склерономными связями можно записать тождество Лагранжа |
|||||||||||||||||||||||||||||
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
rk |
|
∂v |
k |
∑Fk |
∂vk |
|
|
|
|
|
|
|||||||||||||||||
|
|
= |
|
. Тогда Qi = |
|
|
. |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
∂qi |
∂qi |
∂qi |
|
|
|
|
|
|
||||||||||||||||||||
|
|
Пусть в системе действуют силы Fk |
= Fk (c, |
|
,t), тогда |
||||||||||||||||||||||||
|
|
r |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
Qi |
= |
∂ |
|
|
(∑Fkv |
k )= ∂∂W , |
|||||||||||||||
|
|
|
|
|
|
|
|
∂ |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
qi |
|
|
|
qi |
|||||||||||||||
где W = ∑Fkvk - мощность активных сил.
С учетом полученных выводов уравнение (1) приобретает новый вид
∂ |
(T −W )= 0 |
(i = |
|
). |
|
|
1,s |
(2) |
|||||
∂ |
||||||
qi |
|
|
|
|
||
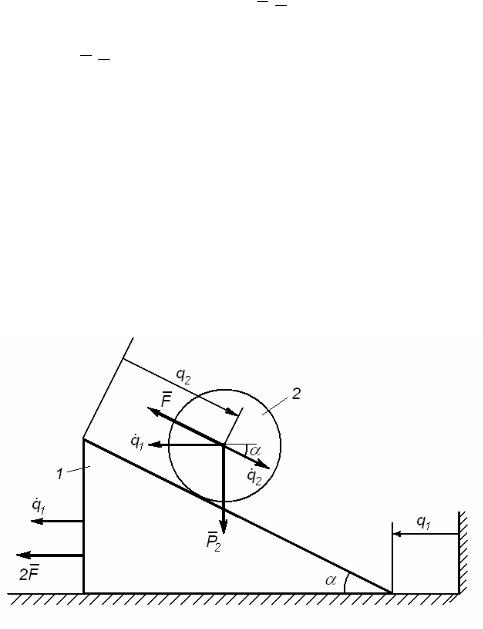
Пример На рис. 198 показана голономная механическая система с двумя
степенями свободы: q1 = q1(t); q2 = q2(t).
Рис. 198

337
Цилиндр 2 массой m2 катится по наклонной грани призмы 1, массой m1, под действием сил F и P2 . Призма перемещается по гладкой поверхности под действием силы 2F .
Зная угол α, определить ускорение призмы и относительное ускорение центра масс цилиндра.
Решение
Запишем уравнение (2) для обобщенной скорости q1 и q2 :
|
|
|
|
|
|
|
|
|
|
∂ |
(T −W )= 0; |
|
|
|
∂ |
|
|
|
(T −W )= 0. |
|
|
|
|
|
|
|
(3) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
∂ |
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Вычислим кинетическую энергию: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
T =T |
+T |
|
|
= |
1 m v |
2 |
+ |
1 I ω2 |
|
+ |
1 m v2 |
, |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
2 |
|
2 |
|
2 |
|
|
|
2 |
2 |
|
2 |
|
|
|
2 |
|
|
1 1 |
|
|
|
|
|
|
|
|
|
|
||||||
где |
v |
2 |
= |
2 |
+ |
|
2 |
− |
|
|
|
|
cos |
α |
; |
ω = |
q2 |
; I |
|
|
= |
1 |
m r |
2 |
|
; v |
2 |
= |
2 |
. |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
2 |
|
1 |
|
|
|
2 |
|
|
1 2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
r |
|
|
|
2 |
|
|
2 |
|
2 2 |
|
|
1 |
|
|
1 |
|
|
|
||||||||
|
|
|
|
|
|
|
= 1 |
|
|
|
|
|
|
|
|
+ 3 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Тогда |
T |
(m |
+ |
|
|
|
|
2 |
|
|
|
|
2 |
− |
|
|
|
|
|
|
cos |
α |
и |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
2 |
|
m )q |
|
4 |
m q |
|
|
|
m q q |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
1 |
|
|
2 |
|
|
2 |
|
|
|
2 |
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
= |
dT |
= |
1 |
(m |
|
+ |
|
|
|
|
+ |
3 |
|
|
|
− |
|
|
|
|
cos |
α − |
|
|
|
cos |
α |
. |
||||||||||||||||||||||
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
dt |
|
2 |
|
|
|
m )q q |
|
|
|
2 |
m q |
q |
|
|
|
|
|
m q q |
|
|
m q q |
|
|
|||||||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
2 |
1 |
2 |
|
|
2 |
|
2 |
|
|
2 |
|
|
|
|
|
2 |
|
1 |
|
2 |
|
|
|
|
|
|
|
2 |
1 |
|
2 |
|
|
|
|
||||||||
Определяем мощность всех сил действующих в системе:
W= 2Fq1 −Fq2 + Fq1 cosα + P2q2 sinα = (2 + cosα)Fq1 − Fq2 + m2gq2 sinα.
Окончательно получим:
(T −W ) = (m1 + m2 )q1a1 + 32 m2q2a2 − m2q2a1 cosα −
−m2q1a2 cosα −(2 + cosα)Fq1 + Fq2 − m2gq2 sinα .
Используя (3), запишем систему двух алгебраических уравнений для определения а1 и а2:
338
(m + m )a − m a cosα = F(2 + cosα), |
|
|||||
|
1 |
2 1 |
2 2 |
|
(4) |
|
−m a cosα + |
3 m a |
= m g sinα − F . |
||||
|
2 |
1 |
2 |
2 2 |
2 |
|
|
|
|
|
|
|
|
Неизвестные величины определяем по способу Крамера.
∆ = |
|
(m1 + m2 ) |
−m2 cosα |
|
= |
1 |
m |
3m |
|
+ m (1+ 2sin2 |
α) |
, |
|||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
−m2 cosα |
|
|
|
|
|
|
|
2 |
|
2 |
|
1 |
|
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
2 m2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
∆1 = |
|
|
F(2 + cosα) |
|
−m2 cosα |
|
|
= |
1 |
m2 [F(6 + cosα) + m2g sin2α], |
|||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
(m g sinα |
− F ) |
|
|
|
|
m |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
∆2 = |
|
(m1 + m2 ) |
|
F(2 + cosα) |
|
= |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
−m cosα |
(m g sinα −F ) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= m (m + m )g sinα + F(2m cosα − m sin2 α − m ). |
|
|
|||||||||||||||||||||||||||||||
2 |
|
|
|
1 |
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|||
Тогда |
a = |
∆1 , |
a |
= |
∆2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
1 |
∆ |
2 |
|
|
∆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
a1 = |
|
F(6 + cosα) + m2g sin2α |
|
, |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
3m + m (1+ 2sin2 |
α) |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
2(m + m )g sinα + 2F(2cosα − sin2 α − m1 ) |
|
|
||||||||||||||||||||||||
|
|
|
|
a = |
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m2 |
. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
3m + m (1+ 2sin2 |
α) |
|
|
|
|||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Чтобы а2 не поменяло знак, нужно положить, что m2gsinα > F.
2.2. Принцип возможных скоростей
Если механическая система со склерономными (стационарными), идеальными и двусторонними связями находится в покое, то уравнение (2) приобретает следующий вид: