

Теоретическая механика. Теория, задания и примеры решения задач (Б.Е.Ермаков)
.pdf
271
Задача Д.8. Дифференциальные уравнения движения механической системы
в обобщенных координатах (Уравнение Лагранжа второго рода)
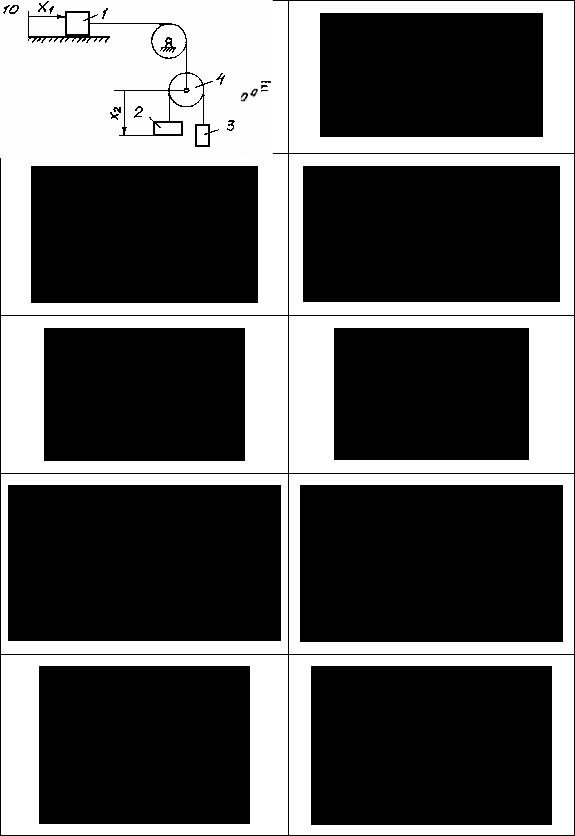
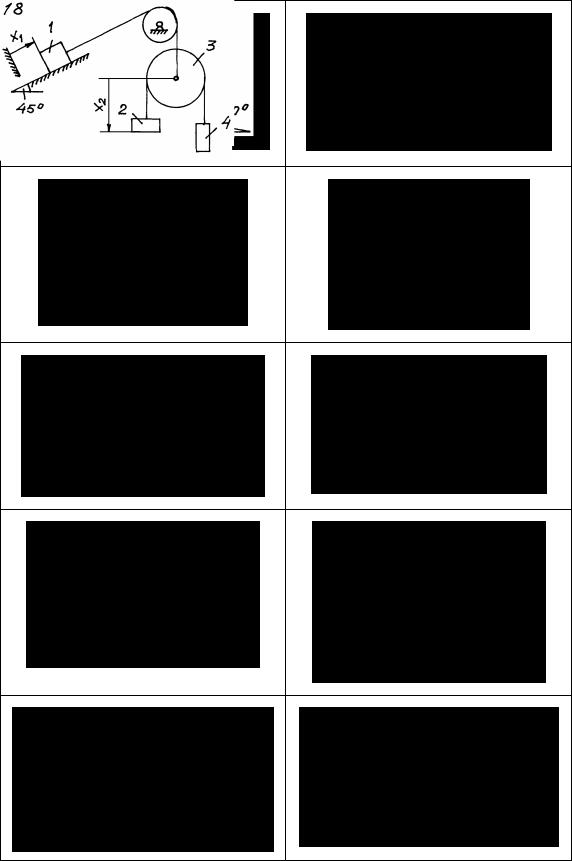
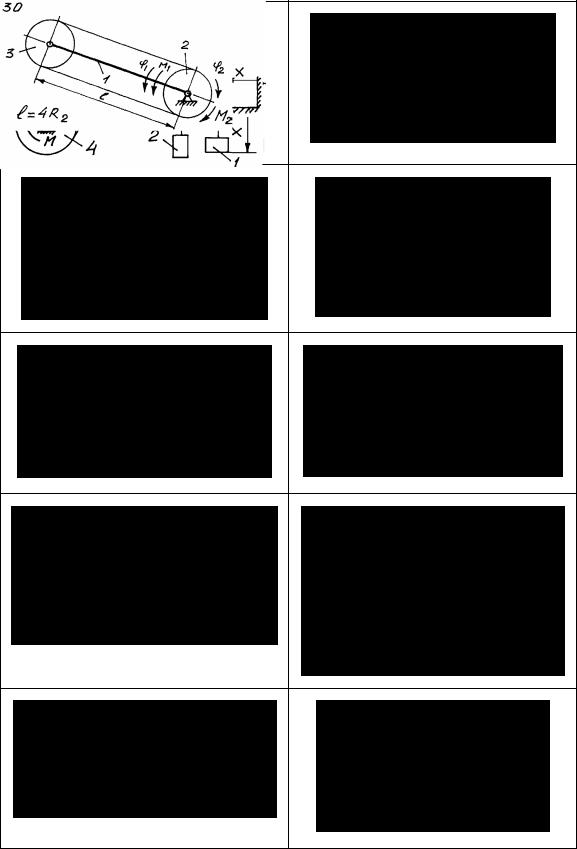
Механическая система (рис. 175 – 177) состоит из твердых тел и нерастяжимых нитей. При движении тел трение скольжения отсутствует. Заданная механическая система – голономная с двумя степенями свободы, имеет стационарные (склерономные) и двусторонние связи. В вариантах встречаются следующие обобщенные
координаты: s = s(t); x = x(t); ϕ = ϕ(t); ϕ1 = ϕ1(t); ϕ2 = ϕ2(t); x1 = x1(t); x2 = x2(t).
Используя уравнения Лагранжа второго рода, определить ускорение тех тел, обобщенные координаты которых заданы. В вариантах 9, 20, 22, 30 механизмы расположены в горизонтальной плоскости. Все данные для расчета приведены в таблице 16.
Пример решения задачи
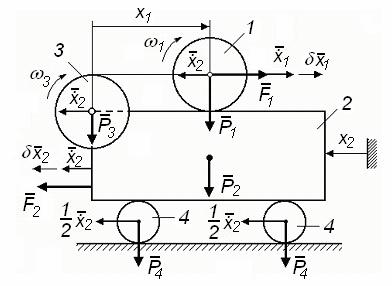
Голономная механическая система (рис. 178) состоит из твердых тел (1 – 4) и нерастяжимой нити между телами 1 и 3. Система движется под действием сил F1 и F2 . Обобщенные координаты x1, x2 показаны на чертеже. Заданы следующие величины: m1 = 4 кг;
m2 = 8 кг; m3 = 2 кг; m4 = 6 кг – массы тел; F1 = 10 Н; F2 = 40 Н –
действующие силы. Диск 1 и цилиндры 4 катятся без скольжения. Определить ускорение центра масс тела 1 и тела 2.
Решение
На рис. 178 показываем скорости всех тел, входящих в систему, выражая их через обобщенные скорости x1 и x2 .

275
|
|
|
|
|
|
|
|
|
|
|
Таблица 16 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вариантаНомер |
m1 |
m2 |
m3 |
m4 |
F |
M |
M1 |
M2 |
R1 |
R2 |
R3 |
R4 |
|
(рис.175- |
|
|
|
|
|
|
|
|
|
|
|
|
|
кг |
кг |
кг |
кг |
Н |
Нм |
Нм |
Нм |
м |
м |
м |
м |
|
|
177) |
|
||||||||||||
1 |
4 |
8 |
2 |
3 |
- |
- |
- |
- |
- |
- |
- |
- |
|
2 |
10 |
6 |
10 |
- |
6 |
2 |
- |
- |
0,8 |
- |
0,8 |
- |
|
3 |
8 |
4 |
6 |
- |
4 |
- |
- |
- |
- |
- |
- |
- |
|
4 |
10 |
6 |
12 |
- |
7 |
- |
- |
- |
- |
- |
- |
- |
|
5 |
6 |
4 |
10 |
- |
- |
- |
- |
- |
- |
- |
0,6 |
- |
|
6 |
6 |
10 |
4 |
- |
6 |
- |
- |
- |
- |
- |
- |
- |
|
7 |
10 |
12 |
6 |
8 |
2 |
- |
- |
- |
- |
- |
- |
- |
|
8 |
6 |
8 |
4 |
4 |
- |
- |
- |
- |
- |
- |
- |
- |
|
9 |
8 |
9 |
6 |
- |
- |
- |
2 |
3 |
1,2 |
- |
0.4 |
- |
|
10 |
10 |
8 |
4 |
6 |
- |
- |
- |
- |
- |
- |
- |
- |
|
11 |
4 |
6 |
2 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
12 |
6 |
8 |
2 |
- |
4 |
- |
- |
- |
- |
- |
- |
- |
|
13 |
2 |
4 |
2 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
14 |
4 |
6 |
8 |
10 |
- |
2 |
- |
- |
- |
- |
- |
0,5 |
|
15 |
4 |
2 |
6 |
- |
5 |
4 |
- |
- |
- |
- |
0,6 |
- |
|
16 |
2 |
4 |
6 |
5 |
- |
- |
- |
- |
- |
- |
- |
- |
|
17 |
4 |
8 |
6 |
- |
6 |
- |
- |
- |
- |
- |
- |
- |
|
18 |
3 |
6 |
8 |
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|
19 |
2 |
4 |
6 |
10 |
- |
- |
- |
- |
- |
- |
- |
0,8 |
|
20 |
6 |
8 |
4 |
2 |
- |
- |
8 |
4 |
- |
0,8 |
0,6 |
0,5 |
|
21 |
2 |
4 |
2 |
6 |
- |
- |
- |
- |
- |
- |
- |
0,4 |
|
22 |
4 |
8 |
3 |
6 |
- |
- |
2 |
6 |
- |
0,8 |
0,4 |
0,6 |
|
23 |
5 |
6 |
8 |
2 |
- |
- |
- |
- |
- |
- |
- |
- |
|
24 |
3 |
8 |
4 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
25 |
6 |
8 |
4 |
- |
6 |
- |
- |
- |
- |
- |
- |
- |
|
26 |
2 |
4 |
6 |
8 |
- |
8 |
- |
- |
- |
- |
- |
- |
|
27 |
4 |
8 |
2 |
- |
4 |
- |
- |
- |
- |
- |
- |
- |
|
28 |
4 |
2 |
6 |
8 |
- |
12 |
- |
- |
- |
- |
- |
0,8 |
|
29 |
8 |
10 |
4 |
2 |
5 |
- |
- |
- |
- |
- |
- |
- |
|
30 |
4 |
6 |
6 |
- |
- |
- |
8 |
2 |
- |
0,6 |
0,6 |
- |
|
277
T2 = 4x22 .
Тело 3 совершает плоское движение, поэтому
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
= |
1 m x |
2 |
+ 1 I ω |
2 . |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
x |
|
|
|
|
|
3 |
|
2 |
|
|
3 |
|
2 |
|
2 |
3 |
31 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
и I |
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При ω |
|
= |
|
|
1 |
|
|
= |
2 |
m R |
|
|
, |
|
находим |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
3 |
|
|
|
3 |
|
|
|
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
= 1 |
|
|
|
|
3 |
+ 1 |
|
|
|
|
|
|
= 1 |
|
|
|
2 + 1 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
2 |
1 |
|
|
2 |
|
|
|
|
2 |
= |
|
2 |
+ |
|
2 |
|
|||||||||||||||
T |
|
m x |
|
|
|
|
m x |
|
|
|
|
|
|
2x |
|
|
|
|
2x |
|
x |
|
0,5x |
|
; |
||||||||||
2 |
2 |
|
2 |
|
|
2 |
|
|
|
|
4 |
|
|
|
|
||||||||||||||||||||
3 |
|
3 |
|
|
2 |
|
|
3 |
|
1 |
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
2 |
|
1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
= |
|
|
2 + |
|
2 |
. |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
2 |
|
|
0,5x |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
Тело 4 совершает плоское движение, поэтому для однородных цилиндров кинетическая энергия
T4 = 34 m4v42 .
При v |
|
= |
1 |
|
|
, получаем |
T = |
|
3 |
m |
|
2 |
= |
|
3 |
|
|
2 |
. |
|
|
|
|
|
|
||||||||||||||
|
4 |
|
2 |
|
4 |
|
4 |
16 |
4 |
|
2 |
|
16 |
|
|
2 |
|
||
T4 =1,125x22 .
Окончательно запишем значение кинетической энергии системы в следующем виде:
T = 3,5x12 - 4x1x2 + 9,25x22 .
Для обобщенных координат x1 и x2 запишем уравнения Лагранжа второго рода:
|
d ∂T |
− |
∂T |
|
= Q ; |
||
|
|
|
|
|
|||
|
dt ∂x |
∂x |
|||||
|
|
1 |
|||||
1 |
|
1 |
|
|
|||
d |
∂T |
− |
∂T |
= Q . |
|||
|
|
|
|||||
dt ∂x2 |
|
∂x2 |
2 |
||||
|
|
|
|||||
Кинетическая энергия T =T (x1,x2 ) - функция только обобщенных скоростей, поэтому

278
∂T = ∂T = 0. ∂x1 ∂x2
Частные производные по обобщенным скоростям x1 и x2 :
∂T |
= |
|
− |
|
|
; |
∂T |
= |
− |
|
+ |
|
|
. |
|
|
|
|
|
|
|||||||||||
∂x |
7x |
|
4x |
|
∂x |
|
|
4x |
|
18,5x |
|
||||
1 |
|
|
2 |
|
2 |
|
|
1 |
|
|
2 |
|
|||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полученные выражения дифференцируем по времени:
d |
|
∂T |
|
d |
|
∂ |
|
|
|
|
|
= 7x1 − 4x2 ; |
|
T |
= -4x1 +18,5x2 . |
||
|
∂ |
dt |
∂ |
|
||||
dt |
|
|
x |
|
||||
x1 |
|
|
2 |
|||||
На схеме рис. 177 показываем возможные перемещения центров масс тел 1 и 2.
Вычисляем обобщенные силы.
Обобщенная сила Q1 = (δAk )1 , при этом δ x1 ≠ 0, δ x2 = 0.
δ x1
(δAk )1 = F1δx1, тогда Q1 = F1 =10 кН.
Обобщенная сила Q = |
(δAk )2 |
, при этом δ x2 ≠ 0, δ x1 = 0. |
|||||
|
|||||||
|
2 |
δx2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(δAk )2 = F2δx2 - F1δx2 =(F2 - F1 )δx2 . Тогда Q2 = F2 = 30 кН. |
|||||||
|
|
|
|
|
|
||
При x |
= a (относительное ускорение тела 1) и |
x |
= a , окон- |
||||
1 |
1 |
|
|
|
2 |
2 |
|
чательно запишем систему двух алгебраических уравнений:
7a1 - 4a2 = 10;-4a1 +18,5a2 = 30.
Определитель коэффициентов при неизвестных a1 и a2
∆= |
|
7 |
-4 |
|
=129,5 -16 =113,5. |
|
|
||||
|
|
-4 |
18,5 |
|
|
279
|
|
|
∆ = |
|
10 |
-4 |
|
|
|
= 185 +120 = 305; |
|
|
||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
1 |
|
30 |
18,5 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
∆2 = |
|
7 |
10 |
|
|
= 210 |
+ 40 = 250 . |
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
−4 |
30 |
|
|
|
|
||||||||||
Тогда a = ∆1 |
= |
|
305 |
|
|
2,7м/с2 ; |
a |
= ∆2 = |
|
250 |
2,2 |
м/с2 . |
||||||||
113,5 |
|
|
113,5 |
|||||||||||||||||
1 |
∆ |
|
|
|
|
|
|
|
|
|
2 |
∆ |
|
|
||||||
Окончательный ответ: |
a1 = 2,7 м/с2; |
a2 = 2,2 м/с2. |
|
|||||||||||||||||