

Теоретическая механика. Теория, задания и примеры решения задач (Б.Е.Ермаков)
.pdf
261
Fδr cosγ − m a δr − m gfδr − Ff sinγδr − m ρ |
2 |
|
a1 |
δr1 |
− |
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
1 |
|
|
|
|
1 1 1 |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 2 R R |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|||
−m g sinα |
r2 |
δr − m |
|
|
r2 |
|
|
a |
|
|
|
|
r2 |
|
δr |
|
− |
1 m |
r2r3 |
|
a |
|
|
|
|
r2 |
|
|
δr |
− |
|||||||||||||||||||||||
2R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
3 |
|
|
|
1 |
|
3 2R |
|
|
1 2R |
|
|
|
|
1 |
|
|
4 |
|
|
3 R |
|
|
|
1 2r R |
1 |
||||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|||
|
|
|
|
|
|
−m gk cosα |
|
|
|
|
r2 |
|
|
|
|
δr |
= 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
2r3R2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
При δr1 ≠ 0, |
эта величина уходит. Члены, |
содержащие a1, пе- |
|||||||||||||||||||||||||||||||||||||||||||||||||||
реносим в другую часть равенства. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
F(cosγ −f sinγ ) − m f − m g |
|
|
|
r2 |
|
sinα − m g |
|
r2k |
|
|
|
cosα = |
|
||||||||||||||||||||||||||||||||||||||||
|
2R |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
2r R |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
2 |
|
|
|
|
|
|
|
|||||
= a |
|
|
|
|
r 2 |
3 |
|
|
|
|
r 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
m |
+ m |
|
2 |
+ |
|
m |
|
2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
1 |
|
1 |
2 R22 |
8 |
|
|
3 R22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Окончательно получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
F(cosγ −f sinγ ) − m gf − m g |
|
|
r2 |
|
|
(sinα + |
k |
cosα) |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
2R |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
a1 = |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
. |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
2 |
|
|
3 |
|
|
|
|
|
r 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
m + m |
|
2 |
|
|
+ |
|
|
|
|
m |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
R22 |
|
|
|
|
|
|
R22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
8 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Чтобы направление вектора a1 не изменилось, на числитель |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
полученной формулы нужно наложить условие |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
F(cosγ −f sinγ )>m gf + m g |
|
|
r2 |
|
|
(sinα + |
k |
cosα). |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
2R |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Если |
F(cos λ −f sinγ ) = m gf + m g |
|
r2 |
(sinα + |
k |
cosα), |
то |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
3 |
|
|
|
2R |
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
||
система будет находиться в покое, или тело 1 будет иметь постоянную скорость движения (v1 = const) .

262
Задача Д.7. Дифференциальные уравнения движения механической системы
в обобщенных координатах (уравнение Лагранжа второго рода)
Для механической системы (рис. 163 - 165), имеющей одну степень свободы, определить ускорение тела 1, применив уравнение Лагранжа1 второго рода.
1. Обобщенные координаты
Обобщенными координатами называются независимые ве-
личины, линейные или угловые, заданием которых однозначно определяется положение материальных точек механической системы в пространстве или на плоскости. Обобщенные координаты зависят от параметра времени: q = q(t) – линейная обобщенная координата; ϕ = ϕ(t) – угловая обобщенная координата. Первые производные по времени от обобщенных координат называются обобщенными ско-
ростями: q = q(t); ϕ =ϕ(t). Число степеней свободы s механи-
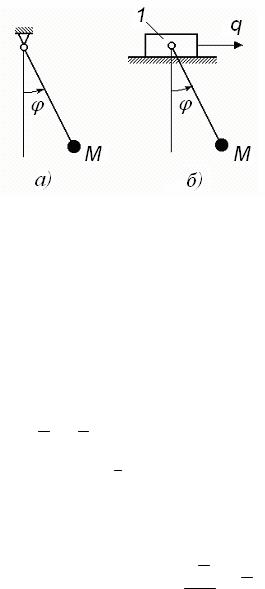
ческой системы определяет количество обобщенных координат. На рис. 173a показана схема математического маятника, кото-
рый колеблется в вертикальной плоскости. Положение точки M можно зафиксировать только углом ϕ = ϕ(t) – обобщенной угловой координатой. Схема эллиптического маятника показана на рис. 173б. Эта система имеет две степени свободы, поэтому и вводятся две обобщенные координаты: ϕ = ϕ(t) – угол отклонения от вертикали нити вместе с точкой M; q = q(t) – поступательное перемещение тела 1 вдоль горизонтальной плоскости.
1 Лагранж Жозеф Луи (25.1.1736 – 10.4.1813). Французский математик и меха-
ник, член Французской АН с 1772 г. В работе “Аналитическая механика” (1788) Лагранж подвел итог всему, что было создано в механике на протяжении 18 века.


266
Запишем основное уравнение динамики для системы:
n |
|
n |
|
n |
|
||
∑mk |
|
|
|
|
|
|
|
a |
k = ∑Fk + ∑Nk , |
(8) |
|||||
k =1 |
|
k =1 |
|
k =1 |
|
||
где mk – масса k – той точки системы; ak = ddtvk - абсолютное ускорение точки;
Fk - активная сила;
Nk - реакция связи.
Левую и правую части равенства (8) умножим на выражение (5) и получим:
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|||||||||||||||||
|
|
|
|
dvk |
|
|
|
|
|
∂rk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂rk |
|
|
|
|
|
|
|
|
|
|
|
∂rk |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
∑mk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δqi . |
||||||||||||||||||||||||||||||||||||||||
|
|
|
δqi = ∑Fk |
|
|
δqi + ∑N |
k |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
k =1 |
|
|
|
|
dt |
|
∂qi |
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
∂qi |
|
|
|
k =1 |
∂qi |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
k |
∂rk |
|
δqi |
|
|
|
= (δAkN )i |
= 0 , так как связи в системе иде- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Но ∑N |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
∂qi |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
альные. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
При δqi ≠ 0 можно записать |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dvk |
|
|
|
∂rk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑mk |
|
|
= Qi . |
|
|
|
|
|
|
|
|
|
|
|
|
(9) |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
∂qi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dvk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
Найдем |
|
|
|
|
|
|
|
|
|
k |
rk |
) = |
|
|
|
|
|
rk |
|
|
|
|
|
|
|
|
k |
( |
drk |
). |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
(v |
|
|
|
|
|
+v |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂qi |
|
|
|
|
∂qi |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
∂qi |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
При |
drk |
|
|
k , с учетом соотношения (2), находим |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
= v |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
. |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dv |
|
|
|
|
|
|
|
∂v |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
rk |
= |
|
|
|
k |
|
|
rk |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(v |
|
) −v |
k |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
∂qi |
|
|
|
|
|
|
|
|
|
|
|
|
|
∂qi |
|
|
|
|
|
|
∂qi |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
Полученную величину подставим в уравнение (9). Тогда |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
∂rk |
|
|
|
|
|
|
|
|
|
|
|
∂vk |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
∑mk |
|
|
|
|
|
k |
) − |
|
|
k |
=Qi . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(v |
∑mkv |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
dt |
∂qi |
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
∂qi |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
267 |
|
|
||
Вынесем |
d |
, |
|
∂ |
|
и |
∂ |
|
за знак суммы, тогда получим: |
|||||||
dt |
∂qi |
|
|
|||||||||||||
|
|
|
|
|
|
∂qi |
|
|
|
|||||||
|
|
|
|
d ∂ |
|
|
n |
1 mkvk2 ) − |
∂ |
n |
1 mkvk2 ) = Qi . |
|||||
|
|
|
|
|
(∑ |
(∑ |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
dt ∂qi k =1 |
2 |
∂qi k =1 |
2 |
|||||||||
n |
1 mkvk2 =T - кинетическая энергия механической системы |
|||||||||||||||
Но ∑ |
||||||||||||||||
k =1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
как функция обобщенных координат и обобщенных скоростей. Окончательно запишем
|
d |
|
∂T |
− |
∂T |
=Q |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
i |
|
|
|
|
|
dt ∂qi |
∂qi |
( i = |
|
). |
|
||||
1,s |
(10) |
|||||||||
Уравнения (10) являются дифференциальными уравнениями движения голономной механической системы в обобщенных координатах или уравнениями Лагранжа второго рода.
5. Структура уравнений Лагранжа второго рода
Окончательный вид уравнений (10) определяется зависимостью кинетической энергии системы от обобщенных координат и скоростей и силами, действующими на систему. Количество уравнений (10) определяется числом степеней свободы s механической системы.
При составлении каждого уравнения Лагранжа (10) необходимо:
1.В механической системе показать обобщенные координаты, количество которых зависит от числа степеней свободы системы, а также обобщенные скорости каждой материальной точки системы.
2.Через обобщенные координаты и обобщенные скорости вычислить кинетическую энергию системы и привести ее к виду (3)
или (4).
3.Вычислить частную производную от кинетической энергии по обобщенной скорости.


269
Дано: m1 ,m2 ,m3 - массы тел; r2, R2, r3 - радиусы тел; F - ак-
тивная сила; a, g - углы; r2 - радиус инерции тела 2; f - коэффици-
ент трения скольжения тела 1; k - коэффициент трения качения тела 3.
Определить ускорение тела 1 ( a1).
Решение
В качестве обобщенной координаты выбираем перемещение тела 1 – x. Тогда q = x . Для этой координаты запишем уравнение
Лагранжа второго рода.
d ∂T − ∂T = Q . dt ∂x ∂x
Вычисляем кинетическую энергию механической системы
T = T1 +T2 +T3 , если v1 = x .
Тело 1 - T1 = 21 m1v12 = 21 m1x2 - поступательное движение.
Тело 2 - T2 = 21 I2ω22 - вращательное движение.
При I |
|
= m ρ2 |
, ω = |
v1 |
= |
x |
, T |
= m |
|
ρ2 |
2 x2 . |
2 |
|
|
|
||||||||
|
2 2 |
2 |
R2 |
|
R2 |
2 |
2 |
|
|
||
|
|
|
|
|
|
|
R2 |
|
|||
Тело 3 - T3 = 21 m3v32 + 21 I3ω32 = 34 m3v32 - плоское движение сплошного цилиндра 3.
При v |
|
= |
|
r2 |
|
v |
|
= |
r2 |
|
x , |
T |
= |
|
|
3 |
m |
|
|
|
r2 |
|
|
2 x2 . |
|
|
|
|||||
3 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
2R2 |
|
2R2 |
|
|
|
3 |
|
16 |
3 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|||||||||||||||
Окончательно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
1 |
|
|
|
|
|
ρ2 |
|
2 |
|
3 |
|
|
|
r2 |
|
|
2 |
|
|
1 |
ax2 |
|
|||||
|
|
|
|
m1 |
|
|
|
|
|
|
|
|
|
x2 |
|
|
||||||||||||||||
|
T = |
+ m2 |
|
|
|
+ |
m3 |
|
|
|
|
|
= |
, |
||||||||||||||||||
|
|
2 |
|
R |
|
|
R |
|
|
|
2 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||