

Теоретическая механика. Теория, задания и примеры решения задач (Б.Е.Ермаков)
.pdfМОСКОВСКИЙ АВТОМОБИЛЬНОДОРОЖНЫЙ ИНСТИТУТ (ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ТЕОРИЯ, ЗАДАНИЯ И ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
МОСКВА 2007
МОСКОВСКИЙ АВТОМОБИЛЬНО-ДОРОЖНЫЙ ИНСТИТУТ
(ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ТЕОРИЯ, ЗАДАНИЯ И ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
Издание второе исправленное и дополненное
Под общей редакцией проф. Б.Е. Ермакова
Допущено УМО вузов РФ по образованию в области транспортных машин и транспортно-технологических комплексов в качестве учебного пособия для студентов вузов обучающихся по направлению подготовки дипломированных специалистов «Транспортные машины и транспортно-технологические комплексы»
МОСКВА 2007
ББК 22.21
С23
УДК 531.8(075)
Р е ц е н з е н т ы : Кафедра теоретической механики МГТУ им. Н.Э. Баумана (зав. кафедрой В. В. Дубинин); доктор физ.-мат. наук, профессор Я.В. Татаринов (кафедра теоретической механики и мехатроники МГУ им. М. В. Ломоносова)
Т е о р е т и ч е с к а я м е х а н и к а :
С23 теория, задания и примеры решения задач. Издание второе исправленное и дополненное. Учебное пособие для техн. вузов/ Ермаков Б.Е., Асриянц А.А., Борисевич В.Б., Кольцов В.И.; Под ред. Б.Е. Ермакова. М.: 2007. – 344 с., ил.
Сборник содержит 22 задания по статике, кинематике, динамике, аналитической механике и колебаниям механической системы для курсовых работ, предусмотренных программой. Каждое задание содержит 30 вариантов. В сборнике приведены краткая теория и примеры выполнения заданий.
Предназначается в качестве учебного пособия для студентов очной формы обучения по специальности «Транспортные машины и транспортно-технологические комплексы».
© Московский автомобильно-дорожный институт (государственный технический университет), 2007
3
Посвящается светлой памяти
заведующего кафедрой теоретической механики МАДИ (ГТУ)
с 1986 по 2004 г.г.
профессора Жигарева В.П.
Предисловие
Теоретическая механика есть наука о простейшей форме движения материи, наука об общих законах механического движения и равновесия материальных тел.
На базе теоретической механики студентами изучаются такие дисциплины, как сопротивление материалов, строительная механика, гидравлика, теория машин и механизмов, детали машин и т.д.
Данное пособие предназначено для студентов технических специальностей всех форм образования, а также может быть использовано инженерами для углубления знаний по теоретической механике.
В пособии приводится краткая теория, набор задач по каждому из разделов курса и примеры их решения. Основываясь на этих примерах, студенты смогут самостоятельно выполнять задания из этого пособия.
4
Статика
Одна из основных аксиом статики гласит, что несвободное твердое тело можно формально представить свободным, если мысленно отбросить механические связи и их действие на тело заменить реакциями связей.
Тогда на тело будут действовать активные силы (P;Q;G;F) и реакции связей (XA ;YA ; ZA ; RC ;N;S) – это и будет расчетная схема для дальнейшего решения задачи.
Обычно в статике при заданных активных силах, действующих на тело, вычисляют реакции связей; поэтому нужно знать, как правильно показать реакции связей.
Рассмотрим виды связей и реакции этих связей.
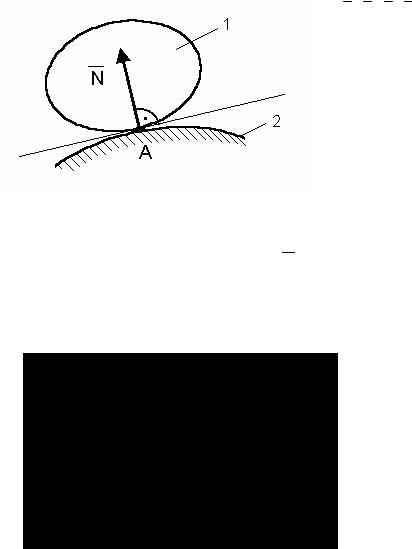
а) Свободное опирание
При свободном опирании (рис. I) реакция N направляется перпендикулярно касательной, проведенной через точку A контакта тела 1 с опорной поверхностью 2.
Рис. I
б) Гибкий элемент (нить, канат, трос, веревка, лента, цепь, ремень)
Гибкий элемент (рис. II) работает только на растяжение. Реакция в нити направляется всегда вдоль нити от тела 1 к сечению AA1.

5
Рис. II
в) Тонкий однородный стержень
Тонкий однородный стержень (рис. III) работает как на растяжение, так и на сжатие.
При этом принято: растяжение — знак ,,+’’; а сжатие — знак ,,–‘’.
Рис. III
Концы стержней крепятся при помощи цилиндрических или сферических шарниров.
Реакция в стержне направляется вдоль стержня от тела B к сечению AA1.
Если задан криволинейный стержень 2, то его мысленно заменяем прямолинейным и точно также направляем реакцию N2 .
6
г) Цилиндрический шарнир на плоскости
На рис. IV показаны различные изображения неподвижного цилиндрического шарнира (НЦШ).
Рис. IV
В неподвижном цилиндрическом шарнире реакция будет одна RA , но мы не знаем ее направления, поэтому всегда показываем составляющие XA ,YA этой реакции, а направление выбираем про-
извольно.
При этом RA2 = XA2 +YA2 .
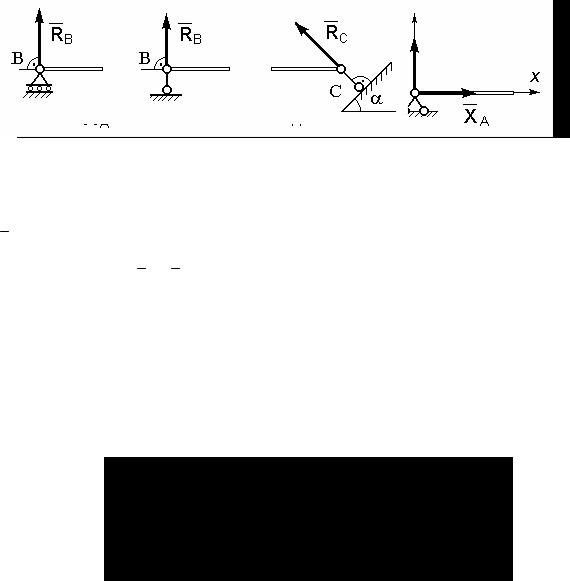
На рис. V показаны различные изображения подвижного цилиндрического шарнира (ПЦШ).
Рис. V
Направление реакции в ПЦШ всегда известно, она направлена перпендикулярно опорной поверхности.
д) Цилиндрический шарнир (подшипник) в пространстве Вал, который может вращаться вокруг своей продольной оси,
имеет опоры – цилиндрические подшипники (рис. VI).
7
Рис. VI
На каждой опоре будет по две составляющих реакций –
XA; ZA; XB ; ZB .
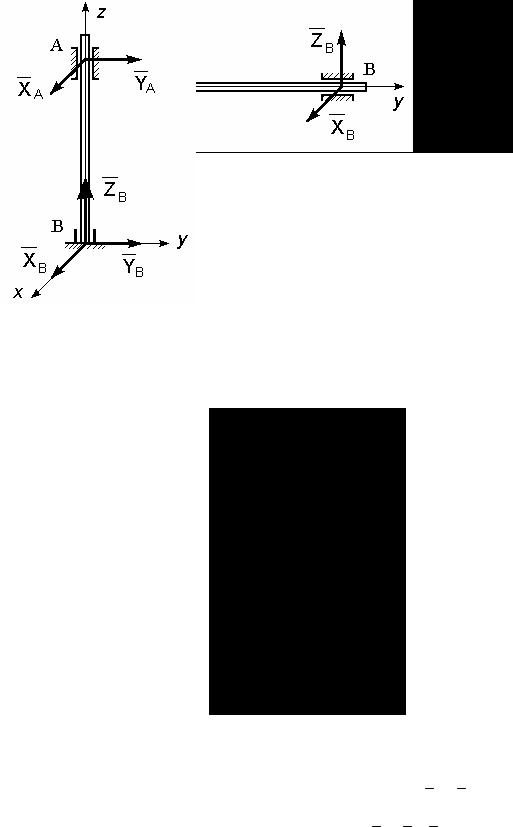
На рис. VII показан вертикальный вал, который имеет две опоры. Опора A – цилиндрический подшипник, а опора B – упорный под-
шипник.
Рис. VII
В опоре A будет две составляющие реакцииXA,YA , а в упорном подшипнике – три составляющие реакции XB ,YB ,ZB .
8
е) Сферический (шаровой) шарнир
Изображение такого шарнира показано на рис. VIII.
Рис. VIII
В сферическом шарнире будет три составляющих реакции –
XA,YA ,ZA .
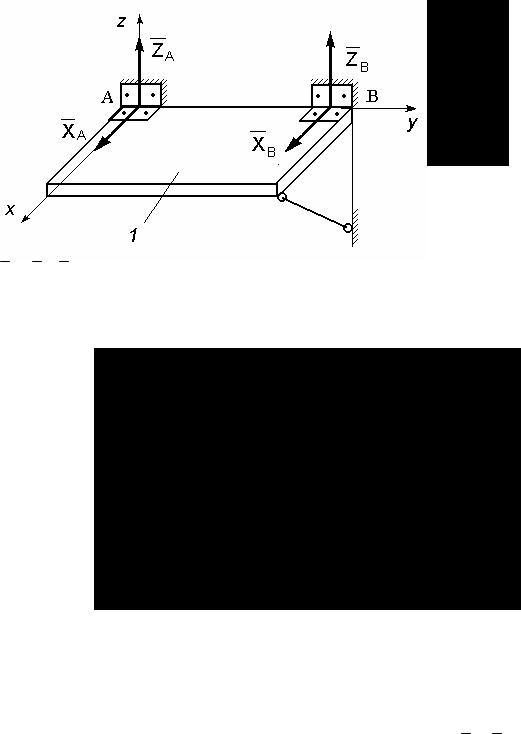
ж) Петля
Рис. IX
Конструктивный вид петли показан на рис. IX. Чисто теоретически полочку 1 можно снять с петель, перемещая ее вдоль оси Ay в любую сторону.
В петле будут только две составляющие реакции XA,ZA .
з) Жесткая заделка
Плоская жесткая заделка показана на рис. X.
9
В плоскости жесткой заделки будут две составляющие реакции XA,YA и момент пары сил MA , который препятствует
повороту балки 1 относительно точки A.
Рис. X
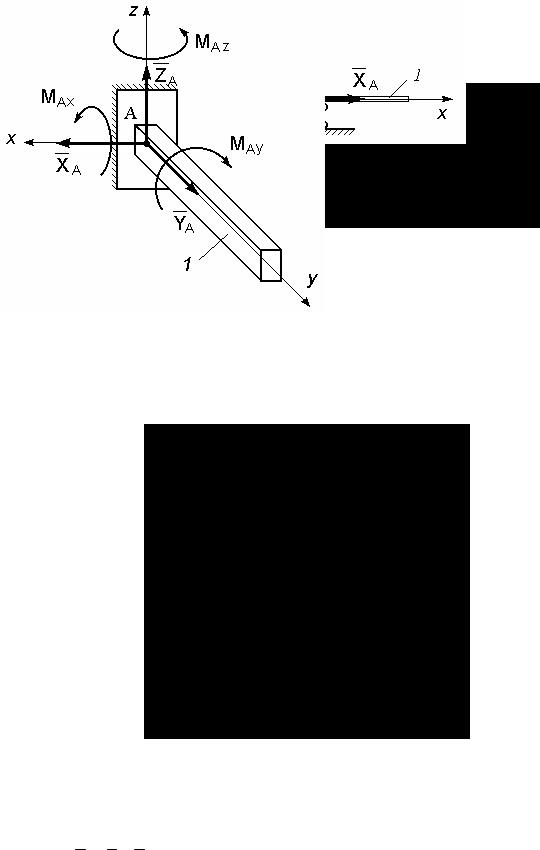
Жесткая заделка в пространстве (рис. XI) отнимает у тела 1 все шесть степеней свободы – три перемещения вдоль осей координат и три поворота относительно этих осей.
Рис. XI
В пространственной жесткой заделке будут три составляющие реакций XA,YA ,ZA и три момента пар сил MAx ,MAy ,MAz .