

17. Силы инерции, их определение для тел с вращательным, поступательным и сложным движением.
Силы инерции звеньев рассматриваются, как реакции звена, как изменение его скорости по величине и направлению. Все силы инерции сводим к главному вектору, который обозначаем Ри приложенного в центре масс звена S и к паре или парой сил, момент которой обозначаем как Ми
Для вр. Пост. И сл. Движения см в конспекте.
18. В чем заключается условие кинетостатической определимости кинематических цепей? Последовательность проведения силового анализа.
Для осуществления силового расчета кинетостатической цепи необходимо, чтобы число уравнений, которое можно составить для этой цепи, было равно количеству неизвестных. Характеризуется откл. Звеньев … точкой приложения, величиной и направлением.
Последовательность см. в конспекте.
19. Основные задачи силового анализа механизмов. Последовательность силового анализа механизмов методом планов на примере.
Для исследуемого механизма, при известных кинематических характеристиках и внешних силах, определить уравновешивающую силу или момент. Под уравновешивающими силами понимают силы к ведущим звеньям, которые уравновешивают систему всех внешних сил и пар сил инерции.
Для равновесия необходимо столько уравновешивающих сил или пар сил, сколько имеется степеней свободы у механизма.
Решение задачи начинают с построения кинематической схемы механизма, с приложенными силами и моментами. Из каждого плана сил возможно определить только две неизвестных. (либо величину, либо направление).
План сил представляет собой многоугольник, где из конца предыдущего начинается следующий, для его построения составляем векторное уравнение сил, действующих на группу Ассура, начиная и заканчивая уравнения неизвестными реакциями. Желательно включить силы действующие на второе звено, затем на третье. Отложив последовательно длины векторов сил, соблюдая направление их действия, проводим из начального вектора прямую n линии действия реакции … а из конца вектора … прямую n линии действия реакции ..
20.Метод Жуковского для определения уравновешивающей силы, целесообразность его использования.
Теорема: Если механизм, под действием системы сил находится в состоянии равновесия, то повернутый на 90 град. План скоростей рассматриваемый как твердое тело, вращающееся вокруг полюса плана и нагруженного теми же силами, приложенными в соответствующей точке плана, также находится в равновесии.
Теорему Жуковского применяют и к системам, которые не находятся в состоянии равновесия, если приложить к ним силу инерции. Пример использования см. в КОНСПЕКТЕ!!!
21. Динамическая модель машинного агрегата, для чего ее используют. Приведение сил и моментов сил к звену приведения.
Для установления законов движения, достаточно установить закон движения ведущего звена. Так как кинематическими способами затем можно определить законы движения других звеньев.
Задача сводится к рассмотрению движения только ведущего звена, заменив все силы и моменты действующей на звено одной приведенной силой и приведенным моментом., а массы и моменты инерции звеньев механизма заменяют одной приведенной массой или одним приведенным моментом инерции.
ПРИВЕДЕНИЕ!! Подробнее в конспекте
Приведенной силой называется сила приложенная к звену приведения и совершающая работу, или создающая мощность равную сумме работ (мощностей) всех сил или моментов сил приложенных к звеньям механизма. После приведения приведенной силы или момента можно построить диаграмму.(см консп.)
22. Динамическая модель машинного агрегата, для чего ее используют. Приведение масс и моментов инерции.
Приведенной массой (моментом инерции) называется такая условная масса (момент инерции), обладая которой главное звено имеет кинетическую энергию, равную сумме кинетических энергий приводимых масс и моментов инерции:
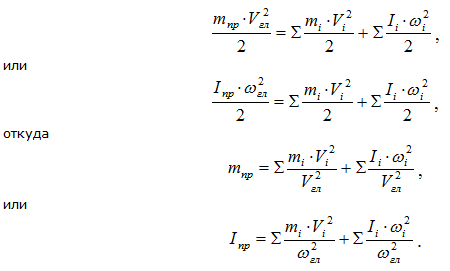
Здесь также удобно определять приведенную массу, если главное звено движется поступательно, и определять приведенный момент инерции, если главное звено совершает вращательное движение.