

14 Стандарт 7498 iso. Клас рівнів середовища зв’язку відкритих систем. Опис рівнів відкритої моделі
За стандартом 7498 ISO середовище зв’язку відкритих систем розділене на сім рівнів
Модель OSI складається з 7 рівнів.
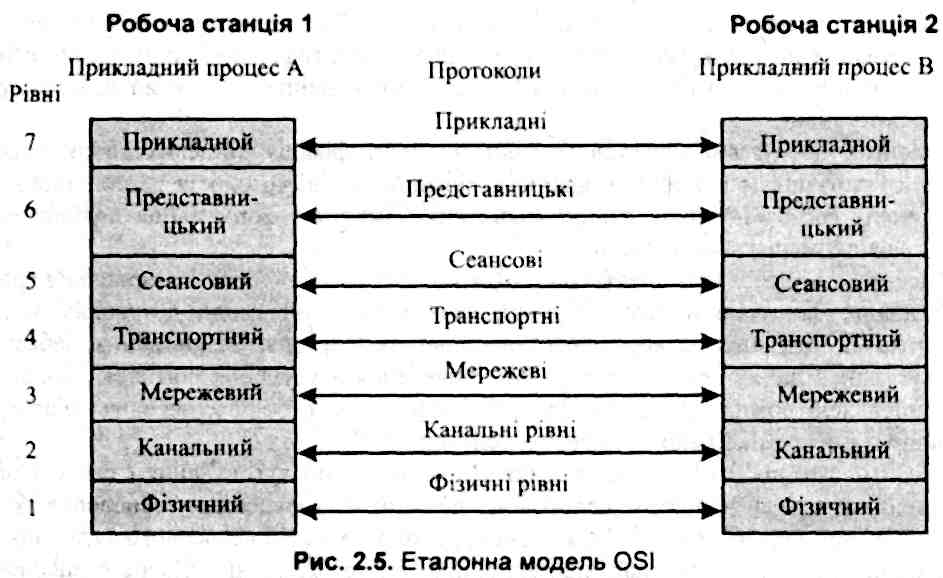
Фізичний рівень. Забезпечує інтерфейс між комп’ютерними мережами. На фізичному рівні по каналах зв’язку передаються послідовності бітів. Керування фізичним каналом зводиться до виділення початку і кінця кадрів, що передаються, і до формування сигналів визнач. форми.
Канальний рівень. Функції полягають в керуванні вводу/виводу інформації в каналі зв’язку. Для підвищення достовірності передавання даних в канальному рівні передбачається використання збиткових кодів, повторна передача даних і інші способи і методи стиснення даних. Обмін даними здійснюється одним із 3 способів: дуплексним, напівдуплексним, симплексним. Процедури канального рівня забезпечують виявлення і, можливо, виправлення помилок, що виникають на фізичному рівні.
Мережевий рівень. Забезпечує передавання мережевих блоків між вузлами мережі. Виконує вибір маршруту передавання даних з усіх можливих і керування вхідним потоком мережевих пакетів. Функція також полягає в створенні фізичних каналів сукупністю логічних каналів, що підвищують ефективнівність використання каналів передавання даних.
Транспортний рівень. Основною функцією є доставка повідомлень, які складаються з мережевих пакетів. Для виконання цих функцій транспортні об’єкти мережевого програмного забезпечення проводять обробку повідомлень на передавання кінці системи і складання повідомлень з окремих частин на стороні прийому інформацій. Транспортний рівень займається узгодженням різних мережевих рівнів за допомогою шлюзів і мостів. Для контроль того, щоб всі повідомлення були відправлені, прийняті використовується метод відправлення квитанції. Існує 5 класів сервісів. Ці класи відрізняються один від одного можливостями пріоритеної передачі даних, захистом від помилок, а також різними способами кодування інформації.
Сеансовий рівень. Дає змогу організувати діалогові сеанси між прикладними процесами. Під час роботи сеансового рівня в користувача складається враження, що прикладні процеси розташовані на одному потужному локальному процесорі.
Рівень відображення. Відображає та перетворює дані , якими обмінюються прикладні процеси. Потреба у рівні відображення зумовлена тим, що різні комп’ютери та пристрої, приєднані до мережі , можуть мати різні форми наведення даних: 8-,16-,32-,64-розрядні , різні системи команд та ін. Можна виділити три форми відображення даних: комп’ютера – джерела інформації, мережі, комп’ютера – приймача інформації
Прикладний рівень. Забезпечує різні форми взаємодії прикладних процесів, розміщення у різних системах. Сьогодні можна можна виділити такі форми протоколів прикладного рівня: керування терміналами, керування діалогами, керування файлами, керування задачами, керування системою, забезпечення цілісності.
Класифікація КМ. Різновиди КМ. Стандартизація КМ.
Класифікація КМ.
Ознаки, за якими класифікують КМ, можуть бути такі:
географічна площа – локальні, регіональні, глобальні мережі;
сфера застосування – офісні, промислові, побутові;
комплекс архітектурних вирішень – Ethernet, Token Ring, Arcnet;
топологія – шинна, кільцева, зіркоподібна, деревоподібна, повнов’язна мережі;
фізичне середовище передавання – мережа з симетричним, коаксіальним, волоконно-оптичним кабелем, інфрачервоним, мікрохвильовим каналом, скрученою парою;
метод доступу до фізичного середовища – мережі з опитуванням, маркерним доступом, суперництвом, уставлянням регістра;
набір протоколів(протокольний стек) – мережі TCP/IP, SPX/IPX.
Різновиди комп’ютерних мереж.
Найкращою ілюстрацією місця та співвідношення різних видів КМ є діаграма „швидкість – відстань передавання”. По осі ординат цієї діаграми відкладено швидкості передавання, а по осі абсцис – відстань, на яку воно виконується.
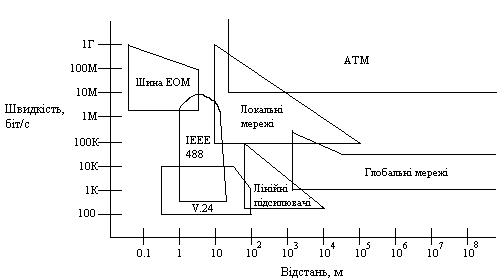
На діаграмі показано такі системи телеопрацювання даних: шина ЕОМ (забезпечує дуже високі швидкості передавання даних - >100 Мбіт/с на короткі відстані 1-10 м; СПД стандарту ІЕЕЕ-488 (гарантує швидкісне передавання даних для лабораторної апаратури- до 10 мбайт/с від 1 до 10 м; рекомендації V.24 (визначають швидкісні характеристики інтерфейсу термінала з модемом); лінійні підсилювачі (дають змогу терміналам приєднатися до ЕОМ через скручену пару на відстані до декількох кілометрів, але з обмеженою швидкістю); локальні мережі; глобальні мережі.
Отже, з усіх засобів телеопрацювання сьогодні можна виділити два типи мереж, що суттєво відрізняються за технологічними вирішеннями: локальні інформаційні мережі (ЛМ) та глобальні інформаційні мережі (ГМ). По-англійськи, відповідно Local Area Network (LAN) та Wide Area Network (WAN).
Локальні інформаційні мережі. За допомогою ЛМ інформацію передають на невелику відстань. Однією з визначальних ознак ЛМ є наявність високошвидкісного каналу передавання даних, швидкість у ньому на порядок вища, ніж швидкість периферійних пристроїв комп’ютерів, та наближається до швидкості внутрішньої шини комп’ютера. Це дало змогу створити РІС – розподілену інформаційну систему. Науковці виділяють три ступені використання РІС : розподіл ресурсів, розподіл навантаження та розподілене опрацювання даних.
У локальних мережах найдорожчими є пристрої опрацювання інформації, а не комунікації. Ефективність системи ЛМ можна підвищити, якщо головну увагу приділити використанню прикладної частини (апаратура+програми+персонал).
Глобальні інформаційні мережі. ГМ територіально не обмежені. Для передавання даних в ГМ найчастіше використовують наявні телефонні канали з малою швидкістю передавання ( 1-3 Кбіт/с) та великим впливом завад. Оскільки вислідна швидкість передавання у ГМ низька, то їх використовують для вирішення задач, які не потребують оперативності (електронна пошта, електронні довідники і т. д.)
З економічного погляду найдорожчий компонент ГМ – обладнання зв’язку.
Крім локальних і глобальних, виділяють регіональні (мережі масштабу міста, району, області) та корпоративні (об’єднання кількох ЛМ в єдину мережу фірми) мережі.
Стандартизація КМ.
Характерною особливістю науки про розподілені інформаційні системи є тенденція до стандартизації та формалізації матеріалу. До цього спонукає предмет дослідження: для того, щоб розподілені системи могли нормально функціонувати, усі складові частини повинні працювати за однаковими правилами.
Міжнародний консультативний комітет з телеграфії та телефонії (МККТТ – ССІТТ по-англійськи) був створений 1957 р. У 1993 р. Його реорганізували в Міжнародний Телекомунікаційний Союз (МТС - ITU). Стандарти ITU поділяють на серії. Кожна серія присвячена конкретній тематиці і позначена великою латинською літерою. Стандарти ITU позначають S.NNN, де S – літера серії, а NNN – номер стандарту. Інколи до стандартів додають суфікси bis, terbo, наприклад V.24bis. Стандарти з такими суфіксами не мають прямого зв’язку зі стандартами без суфікса.
У 1977 р. при Міжнародній організації зі стандартизації (МОС – ISO) був організований технічний комітет 97, який розробляє стандарти для опрацювання інформації на ЕОМ. Стандарти цієї організації позначені NNNN ISO, де NNNN – номер стандарту (Наприклад 7498 ISO).
Деякі організації розробляють стандарти певного технологічного напряму або мережі. До них належить Комісія з питань діяльності Internet, Форум АТМ і т. д.
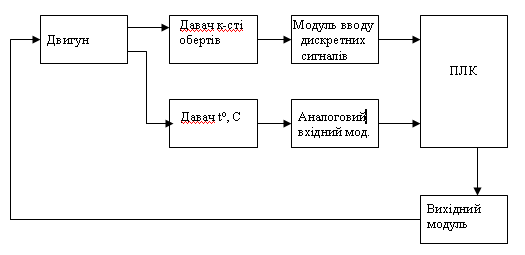
1) Розробити функціональну схему, підібрати конфігурацію технічної частини, розробити програмний алгоритм роботи системи автоматики для управління трифазним електродвигуном. (Використати давачі кількості обертів та температури обмоток двигуна) Передбачити можливість індикації на пульт оператора, ручного керування системою та аварійного її відключення.
F0 – підтвердження оператора (увімкнення гарячого рестарта)
F1 – підтвердження ввімкнення (гарячий рестарт)
TK – гранично-допустиме значення температури обмотки
Конфігурація апаратного забезпечення
PS
CPU S7-300
….
Модуль вводу дискретного сигналу (обчислення частоти).
Модуль аналоговий, вхідний.
Вихідний (керуючий модуль).
2) Розробити функціональну схему, підібрати конфігурацію технічної частини, розробити програмний алгоритм роботи системи регулювання тиску в балоні (Використати давачі тиску, силовий модуль управління двигуном компресора, електромагнітний клапан) Передбачити можливість індикації на пульт оператора, ручного керування системою та аварійного її відключення.
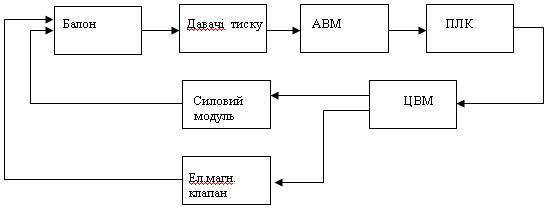
PS – блок живлення.
CPU S7-300
…..
Аналоговий вхідний модуль.
5. Цифровий вихідний модуль.
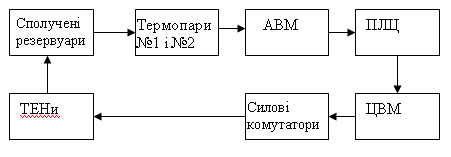
3) Розробити функціональну схему, підібрати конфігурацію технічної частини, розробити програмний алгоритм роботи системи керування температурою в сполучених резервуарах (Використати давачі температури на основі термопари, силові комутатори для керування ТЕНами) Передбачити можливість індикації на пульт оператора, ручного керування системою та аварійного її відключення.
Конфігурація технологічної частини
1PS – блок живлення.
2CPU S7-300
3…..
4Аналоговий вхідний модуль.
5Цифровий вихідний модуль.
4.Розробити функціональну схему, підібрати конфігурацію технічної частини, розробити програмний алгоритм роботи системи керування рівнем рідини в технологічному резервуарі (Використати ультразвуковий або ємнісний давач рівня, силовий модуль управління двигуном насоса, електромагнітний клапан) Передбачити можливість індикації на пульт оператора, ручного керування системою та аварійного її відключення.
Принципова схема
PS – блок живлення.
CPU S7-30
Аналоговий вхідний модуль.
Цифровий вихідний модуль.
5. Розробити функціональну схему, підібрати конфігурацію технічної частини, розробити програмний алгоритм роботи системи керування транспортним конвеєром (Використати кінцеві вимикачі положення вантажу, давач кількості обертів привідного двигуна, силовий модуль управління двигуном) Передбачити можливість індикації на пульт оператора, ручного керування системою та аварійного її відключення.
PS – блок живлення.
CPU S7-30
Аналоговий вхідний модуль.
Цифровий вихідний модуль
6. Розробити функціональну схему, підібрати конфігурацію технічної частини, розробити програмний алгоритм роботи системи керування кутом повороту повітряної заслонки печі (Використати давачі температури, модуль позиціювання заслонки) Передбачити можливість індикації на пульт оператора, ручного керування системою та аварійного її відключення.
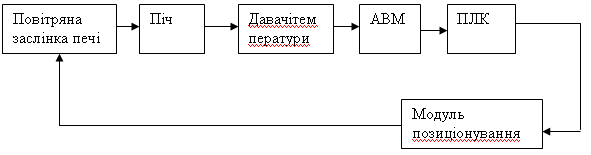
PS – блок живлення.
CPU – S7-300.
…….
Аналоговий вхідний модуль.
5.Модуль позиціонування.
А лгоритм
роботи системи керування кутом повороту
повітряної заслінки.
лгоритм
роботи системи керування кутом повороту
повітряної заслінки.
7. Розробити функціональну схему, підібрати конфігурацію технічної частини, розробити програмний алгоритм роботи системи
керування освітленням приміщення в залежності від інтенсивності зовнішнього освітлення та у вечірній час (Використати давачі освітленості та силові комутатори світильників та зовнішній вимикач) Передбачити можливість індикації на пульт оператора, ручного керування системою та аварійного її відключення.
Принципова схема
Конфігурація апаратного забезпечення
PS – блок живлення.
CPU – S7-300.
…….
Аналоговий вхідний модуль.
5.Цифровий вихідний модуль.
8. Розробити функціональну схему, підібрати конфігурацію технічної частини, розробити програмний алгоритм роботи системи керування трьохкомпонентним об’ємним дозатором (Використати давачі рівня сипучих речовини, силовий привід двигуна міксера, електромагнітні клапани) Передбачити можливість індикації на пульт оператора, ручного керування системою та аварійного її відключення.
Конфігурація технологічної частини
PS – блок живлення.
CPU S7-300
…..
Аналоговий вхідний модуль.
Цифровий вихідний модуль
F0 – підтвердження оператора (увімкнення гарячого рестарта)
h – поточне значення рівня.
9.Розробити функціональну схему, підібрати конфігурацію технічної частини, розробити програмний алгоритм роботи системи керування вологістю в теплиці (Використати два давачі температури, силовий привід насоса орошення) Передбачити можливість індикації на пульт оператора, ручного керування системою та аварійного її відключення.
Принципова схема
Конфігурація