

1. 2.2 Эффективность реализации векторного шим-управления
В
таблице 2 показано, что выражения для
коэффициентов заполнения импульсов
имеют различный вид в каждом секторе.
При внимательном изучении данных
выражений можно прийти к выводу, что,
т.к. sin(x) = sin(-x),
то все коэффициенты заполнения импульсов
могут быть записаны унифицированным
способом: dk=2·Vsm
·sin(")/E·![]() и dk+1=2·
Vsm·
sin(')/E·
,
где "=/3-'
, а '=-(k-1)/3.
Поскольку данные выражения не зависят
от номера сектора, то их можно обозначить
da
и db.
Поскольку область значений '
всегда находится в пределах 0…/3,
то при вычислении da
и db
необходима таблица синусов только для
указанного интервала. Это существенно
снижает объем памяти, требуемый для
хранения таблицы синусов. AT90PWM3 содержит
3 контроллера силового каскада (PSC) для
генерации импульсных сигналов,
сформированных алгоритмом векторного
управления.
и dk+1=2·
Vsm·
sin(')/E·
,
где "=/3-'
, а '=-(k-1)/3.
Поскольку данные выражения не зависят
от номера сектора, то их можно обозначить
da
и db.
Поскольку область значений '
всегда находится в пределах 0…/3,
то при вычислении da
и db
необходима таблица синусов только для
указанного интервала. Это существенно
снижает объем памяти, требуемый для
хранения таблицы синусов. AT90PWM3 содержит
3 контроллера силового каскада (PSC) для
генерации импульсных сигналов,
сформированных алгоритмом векторного
управления.

Рис. 4. Осциллограммы сигналов управления инвертором.
Счетчики выполняют счет от нуля то значения, соответствующего половине периода коммутации (как показано в нижней части осциллограмм сигналов управления инвертором и соответствующие значения регистров сравнения на рис. 4), а затем считают обратно до 0. Значения, которые необходимо сохранить в трех регистрах сравнения, показаны в таблице 3.
Таблица 3. Значения регистров сравнения в зависимости от номера сектора

Лекция 7
1.2.3 Алгоритм определения сектора
Для определения сектора, к которому относится заданное напряжение статора Vs, в литературе предлагаются различные алгоритмы. Они, как правило, требуют множества арифметических операций и основаны на координатах напряжения Vs на плоскости Concordia или фазовом пространстве a-b-c. Когда данные значения определяются по принципу управления V/f, модули напряжений статора Vsm вычисляются по правилу постоянства V/f, а фаза этих напряжений определяется s с помощью дискретно-временного интегратора. Для эффективной реализации данного алгоритма определения сектора необходимо манипулировать ' и k, вместо , в специальном интеграторе, как показано на рисунке 6. Номер сектора k является выходом счетчика по модулю 6, который активизируется при каждом достижении ' значения /3. При этом также выполняется ограничение области значений ' в диапазоне между 0 и /3 (см. рисунок 7).

Рис.5. Алгоритм определения сектора.
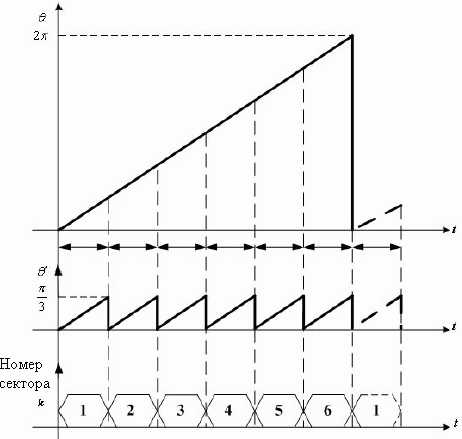
Рис. 6. Определение сектора
Результирующая блок-схема, представленная на рисунке 8, может использоваться для построения контура управления в котором разность между желаемой и измеренной скоростью поступает на вход ПИ-регулятора, в котором определяется частота статорного напряжения. Для снижения сложности контроллера в качестве исходных данных для вычисления правила V/f и алгоритма векторного ШИМ-управления используются абсолютные значения частоты статорного напряжения. Если на выходе ПИ-регулятора присутствует отрицательное значение, то содержимое двух переменных управления силовыми транзисторами инвертора обмениваются местами.
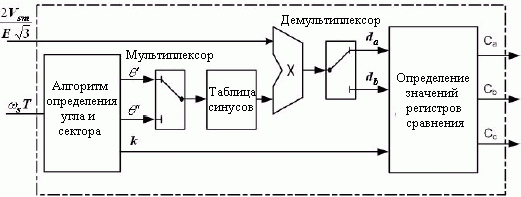
Рис.7. Блок-схема векторного ШИМ-управления

Рис. 8. Блок-схема завершенной системы управления