

Самарский государственный аэрокосмический университет
имени академика В. П. Королева
В.Н Астапов
Управляемый привод
автоматизированных систем
Курс лекций
Самара 2007
Частотно-регулируемые
электроприводы.

Управляемый привод автоматизированных систем
Лекции 34 часа
Лабор. Работы 17 часов
Лекция 1.
Классификация электроприводов. Структура, условия эксплуатации и требования к электроприводу автоматизированных систем.
Введение
Анализ мирового опыта создания нового и модернизации действующего технологического оборудования показывают высокую динамику развития регулируемых электроприводов, компьютерных средств автоматизации, использования информационных средств. Она обусловлена стремлением к максимальному повышению производительности технологического оборудования и качества производимой продукции. Все ведущие электротехнические корпорации выпускают регулируемые электроприводы комплектно с компьютерными средствами автоматизации в виде гибко программируемых систем, предназначенных для широкого использования.
Под электроприводом понимается электромеханическая система, состоящая в общем случае из взаимодействующих преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
Регулируемые электроприводы, как правило, являются и автоматизированными; многие операции в них выполняются средствами управления без участия оператора. Так как, основными средствами управления в электроприводах являются программируемые микроконтроллеры, то уместно определить современный автоматизированный электропривод как компьютеризированный.
Классификация электроприводов.
При исследовании электроприводов используют различные способы классификации.
В качестве классификационных признаков используют:
- виды движения электродвигателей (вращательный, поступательный, линейный, многокоординатный);
- способ соединения двигателя с исполнительным органом (редукторный, безредукторный, конструктивно-интегрированный);
- регулируемость (нерегулируемый, многоскоростной, регулируемый);
- число электродвигателей (одно-, многодвигательный);
- число исполнительных органов (индивидуальный, групповой);
- степень автоматизации (ручной, полуавтоматический, следящий, позиционный, программный, стабилизирующий).
Классификационными признаками также являются:
- функциональное назначение, принцип преобразования электрической энергии в механическую, структура электропривода, техническая реализация.
Во многих случаях автоматические системы управления электроприводами следует рассматривать как взаимосвязанные системы, так как в состав технологического оборудования могут входить десятки электроприводов, объединенных по цепям управления, питания и нагрузки.
Структура, условия эксплуатации и требования к электроприводу.
Структурная схема современного автоматизированного технологического комплекса (АТК) приведена на рис. 1.1.

Рис.1.1. Структурная схема АТК.
Механизмы (исполнительные органы рабочей машины) оснащаются индивидуальными электроприводами с электродвигателями М, управляемыми преобразователями УП, программируемыми микроконтроллерами приводов КП. Совместную работу приводов и механизмов, входящих в состав технологического агрегата, координирует технологический программируемый микроконтроллер КТ. Координацию совместной работы агрегатов технологического комплекса выполняет один из микроконтроллеров КТ или специализированный персональный компьютер ПК, входящий в состав станции оператора СО. Через магистральный преобразователь МП осуществляется связь АТК с распределенной системой управления технологическим процессом. Контроллеры взаимодействуют через коммуникационную связь, структура которой в соответствии с существующими стандартами по индустриальным сетям средств вычислительной техники может быть различной. Контроль агрегатов и управление ими могут осуществляться с периферийных пультов операторов ПО.
Контроллер привода осуществляет: (нас интересует только привод)
- управление силовой частью УП;
- регулирование момента электродвигателя, скорости и положения механизма;
- программно-логическое управление пуском, остановом и режимом рабочего функционирования привода;
- автоматическую настройку регуляторов в режиме наладки;
- контроль состояния и диагностирования неисправностей в компонентах электропривода.
Требования к системе автоматического управления электроприводом могут существенно различаться в зависимости от его назначения. Наиболее жесткие требования к системам управления электроприводами роботов-манипуляторов.
Более сложные принципы построения систем управления автоматизированным приводом применяют для роботов, обеспечивающих точную траекторию движения рабочих органов и высокую производительность. При этом неизменно действуют различного рода ограничения (по скорости, ускорению, току и т.д.) обусловленные как технологическими факторами, так и предельными возможностями привода. Обеспечение заданного качества движения при действующих ограничениях предопределяет применение оптимальных систем управления электроприводом.
Принцип оптимальности позволяет обеспечить оптимальное управление в том смысле, что для заданных объекта управления и условий его работы с учетом ограничений обеспечивается экстремальное значение некоторого показателя качества, характеризующего наилучший режим работы объекта. Такими показателями качества могут быть быстродействие, производительность, точность воспроизведения заданного движения и т.п..
В теории управления широко распространены в качестве характеристик режима работы системы функционалы определенного вида. В общем случае функционал зависит от переменных состояния xi(t), управляющих uj(t) и возмущающих gl(t) воздействий:
J = f(x1, x2,…xn; u1, u2,…ur; g1, g2,…gk,t),
или в векторной форме
J=f(X,U,G,t).
Движение экстремального значения этого функционала указывает на оптимальное состояние системы либо в динамике, либо в статическом режиме в зависимости от выбранного критерия оптимальности.
Так как в процессе эксплуатации электропривода его свойства и условия работы не остаются постоянными, то возникает необходимость подстройки регулятора для сохранения экстремального значения функционала качества.
Для этой цели в систему управления вводят контур адаптации, позволяющий автоматически изменять в процессе работы характеристики или структуру регулятора таким образом, чтобы выполнялся критерий оптимальности.
Для контура адаптации объектом управления является основная система автоматического управления (САУ), по отношению к которой контур адаптации образует второй уровень управления. Адаптивная система управления, работающая на основе контроля поведения объекта, нарушает нормальный режим эксплуатации объекта при его идентификации. Поэтому непрерывную адаптацию из-за ухудшения качества управления объектом применять вряд ли целесообразно.
Наиболее перспективны системы управления с периодической адаптацией, функционирующие в промежутках времени между моментами адаптации как обычные САУ.
Лекция 2
Принципы построения и алгоритмы регулирования управляемых приводов автоматизированных систем.
Традиционно ранее использовались системы управляемого пуска электропривода, которые выполняли функции ступенчатого или плавного регулирования скорости в довольно ограниченном диапазоне скоростей. Эти приводы обладали низкими энергетическими показателями из-за больших потерь электроэнергии. Их использование возможно для кратковременного снижения скорости до определенных значений и исключено при плавном регулировании скорости в большом диапазоне.
В настоящее время получили свое развитие регулируемые электроприводы с управляемым преобразователем и системами управления, оптимально приспособленными по энергетическим и технологическим показателям.
Управляемые преобразователи электроэнергии выполняются как полупроводниковые, в виде неуправляемых и управляемых выпрямителей, автономных инверторов напряжения (АИН) и тока (АИТ) инверторов, ведомых сетью, преобразователей частоты с непосредственной связью. Для устранения искажения формы напряжения сети в преобразователях применяют фильтрокомпенсирующие устройства. Виды преобразователей и их комбинации определяются типом электродвигателя и задачами управления, мощностью, диапазоном регулирования, необходимостью рекуперации энергии в сеть, влиянием преобразователей на питающую сеть.
Схемотехнические решения преобразователей в электроприводах постоянного и переменного токов остаются традиционными. С учетом возрастания требований к энергетическим характеристикам электроприводов и их влиянию на сеть развитие получают преобразователи, обеспечивающие экономичные способы управления электроприводами. Изменения схем преобразователей главным образом связаны с появлением новых приборов – мощных полевых транзисторов (MOSFET), биполярных транзисторов с изолированным затвором (IGBT), запираемых тиристоров (ОТО).
Существуют следующие тенденции развития преобразователей:
расширение границ применения полностью управляемых приборов (транзисторов мощностью до 3…5 МВт, тиристоров мощностью до
5…20 МВт); распространение методов широтно-импульсной модуляции (ШИМ); блочные принципы построения преобразователей на основе унифицированных силовых гибридных модулей, выполняемых на базе транзисторов и тиристоров; возможность выполнения преобразователей постоянного и переменного тока и их комбинаций на единой конструктивной основе, в том числе на базе интеллектуальных силовых модулей.
Тиристорные пусковые устройства
(СИЛОВАЯ ЧАСТЬ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА)
Основные теоретические положения.
В последние годы большое распространение во всем мире получают тиристорные пусковые устройства, или, как их ещё называют, устройства плавного пуска, предназначенные для управления пусковыми режимами и режимами останова трехфазных низковольтных асинхронных двигателей с короткозамкнутым ротором. Эти устройства обеспечивают управляемые функции: безударный пуск с наиболее благоприятным для приводного механизма режимом, режим останова, защиту от анормальных режимов и диагностику, как при пуске, так и в рабочем режиме.
Анализ показывает, что применение управляемого пуска позволяет существенно уменьшить вредные динамические воздействия на двигатель и приводной механизм и, следовательно, увеличить срок службы электропривода. Если не требуется регулировать частоту вращения приводного механизма, то применение ТПУ позволяет с минимальными затратами решить все проблемы, связанные с обеспечением управляемого пуска и останова двигателя.
Это подтверждают типичные кривые изменения пускового тока (рис.1а) и пускового момента (рис. 1б) при прямом пуске (кривые 1), при пуске переключением со звезды на треугольник (кривые 2) и при применении тиристорного пускового устройства (ТПУ) (кривые 3).
а)

Несмотря на большое разнообразие устройств рассматриваемого класса, можно констатировать, что на сегодняшний день подавляющее большинство устройств мощностью от 1 до 400 кВт на напряжение до 660 В строятся по одной и той же схеме силовой части, известной с конца 20-х годов прошлого века, и обладают некоторым стандартным набором функций.
Эта схема представляет собой тиристорный регулятор напряжения с фазовым управлением, представленный на рис. 2. Между силовой питающей сетью и асинхронным двигателем установлены 6 полупроводниковых
б)

Рис. 1. кривые изменения пускового тока (б) и пускового момента (а).
управляемых вентилей (тиристоров), импульсы управления которыми формируются специальной системой управления. Изменение угла управления тиристорами приводит к изменению действующего значения напряжения на выходе ТПУ и соответственно к изменению частоты вращения приводного двигателя. Формируя требуемые характеристики процесса нарастания напряжения при пуске и процесса уменьшения напряжения при останове, можно формировать требуемые показатели кривых разгона (пуска) и останова приводного двигателя.
Выпускаются подобные устройства и в реверсивном исполнении, которое отличается наличием дополнительных вентилей, обеспечивающих изменение направления вращения (рис. 3).
Развитие микроэлектроники привело к тому, что в настоящее время ядро системы управления выполняется, как правило, на микроконтроллере, что позволяет реализовывать алгоритмы управления двигателем практически любой степени сложности и обеспечивать выполнение любых требуемых функций.
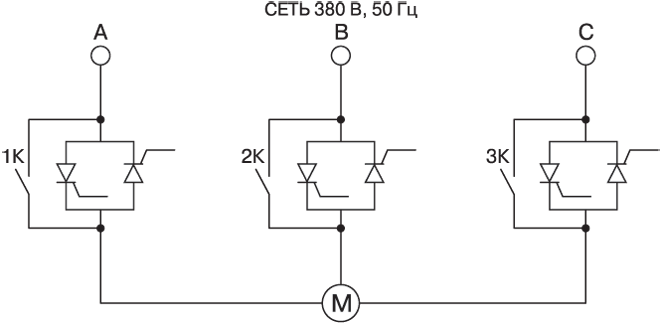
Рис. 2. Тиристорный регулятор напряжения.

Рис. 3. Тиристорный регулятор напряжения реверсивный.
Сравнение выполняемых функций устройств различных производителей позволяет сказать, что подавляющее большинство устройств реализует следующие основные функции:
управление пусковым режимом;
управление режимом останова;
управление рабочим режимом;
защитные функции;
вспомогательные функции;
интерфейс между устройством и оператором;
интерфейс между устройством и управляющим элементом верхнего уровня.
Лекция 3