

Определение параметров настройки регулятора
В настоящее время предложены различные инженерные методики в виде формул и номограмм для определения параметров регуляторов.
Рассчитанные по приведённым формулам и номограммам значения параметров настройки регулятора вследствие упрощений при определении параметров объектов могут отличаться от значений, обеспечивающих требуемое качество регулирования.
В процессе наладки и эксплуатации АСР с типовыми регуляторами параметры настройки уточняются экспериментально.
Табл 1. Формулы для определения настроек регуляторов для статических объектов
Применяемый регулятор |
предполагаемый переходный процесс |
||
Апериодический |
200/0-ное перерегулиро-вание |
минимум интегральной квадратичной оценки |
|
И-регулятор |
кр.
= |
кр.
= |
кр. = |
П-регулятор |
кр.
= |
кр.
= |
кр.= |
ПИ-регулятор |
кр.= Tи
=
0,6 T |
кр.=
Tи = 0,7 T |
кр.=
Tи = T |
ПИД-регулятор |
кр.=
Tи
= 2,4 Tд = 0,4 |
кр.=
Tи = 2 Tд = 0,4 |
кр.=
Tи = 1,3 Tд = 0,5 |
Табл 2. Формулы для определения настроек регуляторов для астатических объектов.
Применяемый регулятор |
предполагаемый переходный процесс |
|
|
апериодический |
200/0-ное перерегули-рование |
минимум интегральной квадратичной оценки |
||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
|
|
|
||||||||
|
|
|
|
|
||||||||
|
|
|
|
|
||||||||
П-регулятор |
кр.= |
кр.= |
_ |
ПИ-регулятор |
кр.= Tи = 6 |
кр.= Tи = 3 |
кр.=
Tи = 4 |
ПИД-регулятор |
кр.=
Tи = 5 Tд = 0,2 |
кр.=
Tи = 2 Tд = 0,4 |
кр.=
Tи = 1,6 Tд = 0,5
|

рис.6. Настройка И-регулятора (а) и П-регулятора (б) на статических объектах
I— апериодический процесс; II— с 20-% перерегулированием; III— процесс с min
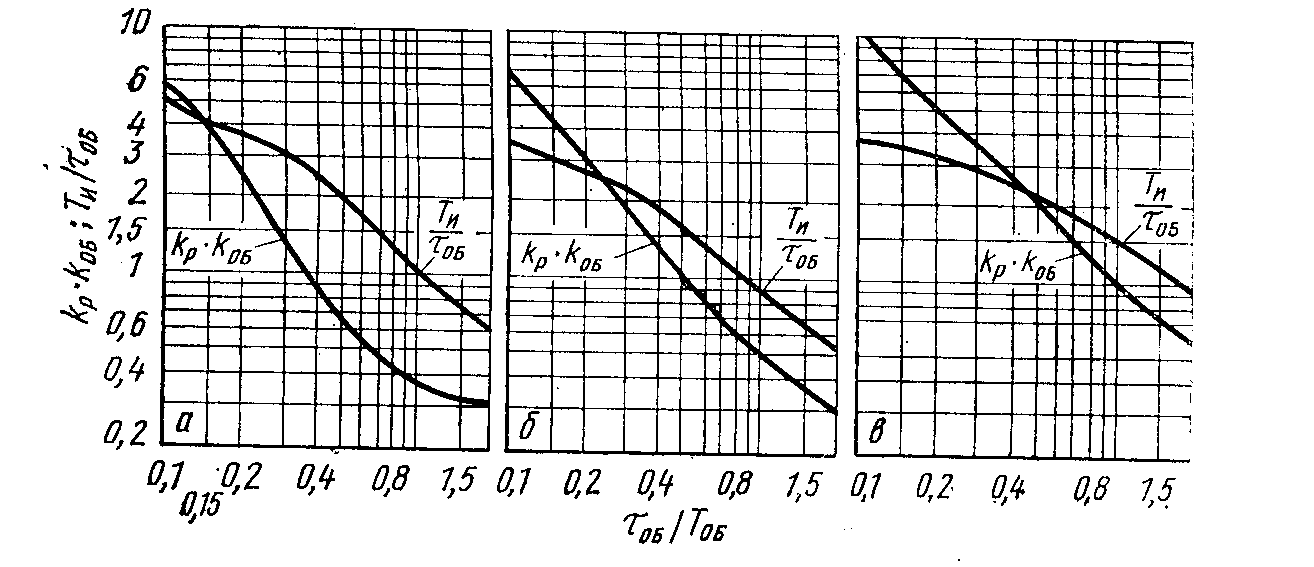
рис. 7. Настройки ПИ-регулятора на статических объектах
I— апериодический процесс; II— с 20-% перерегулированием; III— процесс с min
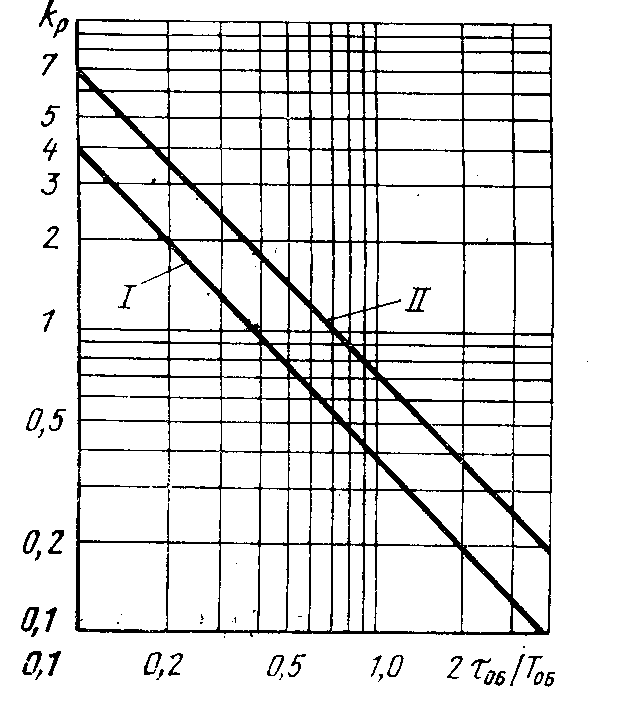
рис. 8. Настройки П-регулятора на астатических объектах
I— апериодический процесс; II— процесс с 20-% перерегулированием

рис. 9. Настройки ПИ-регулятора на астатических объектах
а— апериодический процесс; б— с 20-% перерегулированием; в— процесс с min

рис. 10. Настройки ПИД-регулятора на астатических объектах
а— апериодический процесс; б— с 20-% перерегулированием; в— процесс с min