

Следящие системы переменного тока, работающие на несущей частоте
Механизмы, к которым не предъявляются требования работы с повышенной точностью, с успехом могут снабжаться весьма простыми следящими приводами переменного тока, функционирующими на несущей частоте. В этих приводах используются наиболее простые по конструкции двухфазные двигатели с короткозамкнутым или полым ротором. В качестве измерителей рассогласования применяются сельсины или вращающиеся трансформаторы, включенные по трансформаторной схеме. На выходе сельсина-приемника при этом создается сигнал, который представляет собой модулированное по величине угла рассогласования напряжение переменного тока. Несущее напряжение имеет промышленную частоту 50 Гц или в автономных и бортовых установках (с индивидуальным источником питания) повышенную частоту 400 Гц. Двухфазный двигатель выполняет не только функции двигателя, но одновременно является демодулятором. Его скорость определяется амплитудой модулированного напряжения на обмотке управления. При этих условиях весь тракт усиления может быть выполнен полностью на переменном токе. Следовательно, отпадает отрицательное свойство усилителей постоянного тока -дрейф нуля. Усилители переменного тока в работе более стабильны.
Структура системы получается единообразной (рис. 6); все элементы ее работают на переменном токе - на несущей частоте -частоте питания. Однако в этих системах весьма затруднено использование корректирующих средств как в последовательной цепи, так и в цепях обратных связей. Обычные корректирующие средства, используемые в системах управления постоянного тока, здесь неприменимы. Поясним это на примере дифференцирующего звена. Предположим, что на вход дифференцирующего звена поступает сигнал

Рис. 6. Система на несущей частоте
1 -измеритель рассогласования (он же модулятор); 2, 3, 5, 6 - звенья системы; 4 - дифференциальное звено; 7-объект (он же демодулятор); 8- ТГ
xвх = U(t)sinΩt (6.4)
где Ω - несущая частота в системе; U(t) - модулирующее напряжение (полезный сигнал).
Тогда при идеальном дифференцировании будем иметь
xвых=dxвых /dt=U’(t)sinΩt + U(t)ΩcosΩt
Следовательно, на выходе наряду с полезным сигналом, пропорциональным производной от входного воздействия, появится квадратурная составляющая, смещенная по фазе на угол π/2. При этом ее амплитуда может быть намного больше амплитуды полезного сигнала, так как в качестве сомножителя в ее величину входит несущая частота Ω. В итоге квадратурная составляющая может забить полезный сигнал.
Представим сигнал на входе корректирующего звена как
xвх=U(t)e-jΩt
Для неискаженного преобразования необходимо, чтобы корректирующее звено преобразовало лишь огибающую, не влияя на функцию e-jΩt.
В
связи с изложенным в системах переменного
тока должны использоваться
специальные корректирующие средства,
которые
могут работать на несущей частоте,
однако их применение связано с рядом
технических трудностей, рассмотренных
ниже. Поэтому
весьма часто внутри системы используется
блок, состоящий из демодулятора и
модулятора (рис. 7), между которыми
после соответствующего фильтра включаются
обычные корректирующие
звенья постоянного тока. Наличие фильтра
отрицательно влияет на динамику системы,
так как вызывает дополнительный
фазовый сдвиг. Однако он, безусловно,
необходим,
причем его роль особенно существенна
при частоте питания

Рис. 7. Система переменного тока с блоком демодулятор – модулятор (блок А)
2 - усилитель; 3 - демодулятор; 4 - фильтр; 6 - корректирующее звено; 7 - модулятор; 8-усилитель; 9-двигатель; 10-тахогенератор; 11-демодулятор; 12-фильтр; 13 - корректирующее звено в цепи обратной связи
400 Гц. Гармонические составляющие после дифференцирования могут создавать существенные помехи. Высокие требования предъявляются также к синусоидальности питающего напряжения. Гармонические составляющие в напряжении питания тоже генерируют помехи, которые после дифференцирования могут быть весьма значительными. Если в цепи обратной связи используется асинхронный тахогенератор, то последовательно в его цепь до корректирующего звена тоже должен быть включен демодулятор.
Расчет корректирующих звеньев и синтез систем с блоками демодулятор - модулятор практически не отличается от соответствующего расчета для системы постоянного тока.
Рассмотрим
теперь принципы построения корректирующих
звеньев,
работающих непосредственно на несущей
частоте Ω..
Положим, что полезный сигнал изменяется
по периодическому закону с частотой
![]() с
т. е.
с
т. е.
U(t) = Umaxsin ωct (6.6)
Тогда на входе корректирующего звена будем иметь напряжение
uвх = Umax sin ωct · sin Ωt (6.7)
или
uвх = Umax /2 [cos (Ω - ωc)t – cos(Ω + ωc)t] (6.8)
т. е. входной сигнал может быть представлен двумя гармоническими составляющими с частотами, равными сумме и разности несущей частоты и частоты полезного сигнала. Запишем передаточную функцию корректирующего звена как
W(jω) = W(ω)e jψ (6.9)
где W(ω) - амплитудная частотная характеристика;
ψ(ω) - фазовая характеристика.
Для нормальной неискаженной работы корректирующего звена необходимо, чтобы эти характеристики были симметричны относительно точки, соответствующей несущей частоте Ω и вертикальной оси, проходящей через эту точку (рис.8). Условие симметрии амплитудной характеристики (четная характеристика) относительно оси, проходящей через точку Ω, может быть представлена как
W(Ω – ωc) = W(Ω + ωc) (6.10)
Для фазовой характеристики (нечетной) соответствующее условие центральной симметрии будет
ψ(Ω – ωc) = – ψ(Ω + ωc). (6.11)
При отсутствии симметрии появится квадратурная составляющая, искажающая преобразование сигнала.
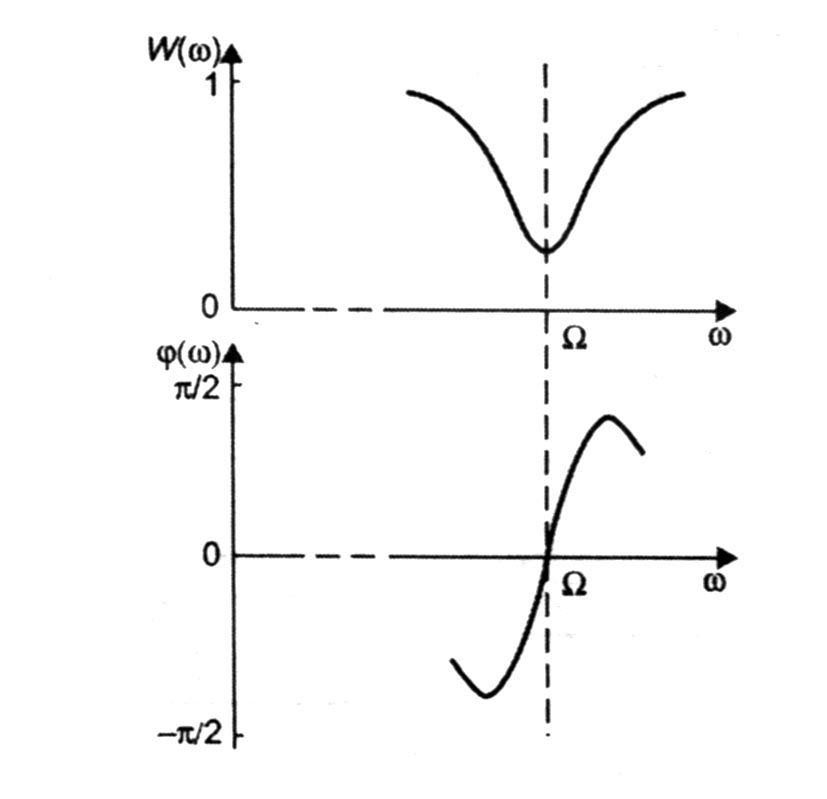
Рис. 8. Амплитудная и фазовая характеристики корректирующего (форсирующего) звена, работающего на переменном токе
Характеристики W(Ω + ωc) и ψ(Ω + ωc), перенесенные в начало координат, одновременно являются зависимостями для амплитуды и фазы модулирующего сигнала W(ωc) и ψ(ωc). Следовательно, в системе на несущей частоте характеристики корректирующего звена постоянного тока как бы смещаются по оси частот в точку, соответствующую несущей частоте. Таким образом, если синтезировано корректирующее звено для работы в системе постоянного тока, то для того, чтобы перейти к звену, работающему на несущей частоте, достаточно в выражении для передаточной функции W(ωc) заменить ωc на Ω + ωc.
Рассмотрим некоторые частные примеры синтеза корректирующих звеньев переменного тока. Форсирующее звено, используемое в системах постоянного тока, обычно строится по схеме рис. 9, а. При этом его передаточная функция имеет вид
W(p) = ρ(1 + Tp)/(1+ρTp) (6.12)
где T = r1C; ρ = r2 / (r1 + r2)
При работе на несущей частоте контур должен представлять собой полосовой фильтр, настроенный на несущую частоту, при этом конденсатор заменяется параллельным соединением индуктивности и емкости (рис. 9, б). Передаточная функция такого звена будет
W(p) = r2/(r2 + (r1Lp)/(r1 + Lp + r1LCp2)) =
= (r2[T1T2p2 + T1p + 1])/(r2[r2[T1T2p2 + T1p + 1] + r1T1p) =
= (r2/r1 + r2) · (T1T2p2 + T1p + 1)/((r2/ r1 + r2)[ T1T2p2 + 1] + T1p) (6.13)
где T1 = L / r1 ; T2 = r1C

Рис. 9. Схемы форсирующих звеньев (1-й вариант): а - на постоянном токе; б –на несущей частоте
Соответственно при резонансе
LC=T1T2 = 1/Ω2
где Ω - несущая частота.
Обозначив дополнительно r2 / (r1 + r2) = ρ, получим
W(p) = (ρ((1/Ω2)p2 + T1p 1)) / (ρ((1/Ω2)p2 + 1) + T1p) (6.14)
Перейдем теперь к частотным характеристикам. Заменив
p = jω = j(Ω + ωc), (6.15)
Получим
W(jω) = (ρ((ω2/Ω2) + jωT1 + 1)) / (ρ((–ω2/Ω2) + 1) + jωT1)) =
= (ρ((Ω2 – (Ω + ωc)2 + j(Ω + ωc) ΩT1)) / (ρ[Ω2 – (Ω + ωc)2 ] + j(Ω + ωc) ΩT1) =
= (ρ(–(2Ω + ωc)ωc + j(Ω + ωc)Ω2T1)) / (–ρ(2Ω + ωc)ωc + j(Ω + ωc)Ω2T1), (6.16)
Так как Ω » ωс, то без большой погрешности ωс в круглых скобках можно не учитывать и соответственно можем написать
W(jω) = (ρ(2ωc – jΩ2T1)) / (ρ · 2ωc – jΩ2T1) (6.17)
Умножив числитель и знаменатель на j, получим
W(jω) = (ρ(2Ω2T1 + j · 2ωc )) / (2Ω2T1 + j · 2ρωc ) =
= (ρ(1 + (2ωc / Ω2T1)) / (1 + jρ(2ρωc / Ω2T1 )) (6.18)
Если обозначить 2/ Ω2T1 = Т, то окончательно получим
W(jω) = (ρ(1 + jωcT))/ (1 + jωcρT) (6.19)
Найденное выражение адекватно аналогичному выражению для реального форсирующего звена, широко используемого в следящих системах постоянного тока.
Так как Ω2 = 1/LC, то также можем написать
Т=Тп= 2r1LC/L = 2r1C = 2Tн (6.20)
или Tн = Тп/2. Здесь индекс "п" соответствует корректирующему звену, работающему на постоянном токе (для моделирующего сигнала); "н" -тоже на несущей частоте. Следовательно, емкость в звене, работающем на несущей частоте, должна быть в два раза меньше, чем в звене, работающем на постоянном токе, т. е. Сн = С/2, а индуктивность Lн = 2/Ω2C = 2L. Резисторы остаются неизменными.
Следует отметить, что схема рис. 9, б практически не используется, так как для нее необходима катушка индуктивности с весьма большой добротностью. Практически применяется корректирующее звено (рис. 10, б), аналогичное корректирующему звену (рис. 10, а). В системах постоянного тока последнее используется редко, так как введение в схему катушки индуктивности вообще нежелательно (большие габариты, нелинейность характеристики, нагрев и т. п.). В цепях переменного тока применение катушек индуктивности становится необходимым, а требование по ее добротности для схемы (рис. 10, 6) ниже, чем для схемы (рис. 9, 6).
Частотная передаточная функция рассматриваемого второго варианта корректирующего звена описывается выражением (20), причем в этом случае
Lн = L/2, а Сн = 2/ Ω2C
Трудности изготовления катушек индуктивности с высокой добротностью и линейными характеристиками обусловили отказ от простейших схем корректирующих звеньев, аналогичных схемам, используемым на постоянном токе, и переход к мостовым схемам, построенным целиком на элементах rC (рис. 10).
Передаточная функция Т-образной мостовой схемы имеет тот же вид (19). При этом
ρ = 2r2/(2r2 + r1) = r2/(r2 + (r1/2)), T = Tп = 1/r2CΩ2

Рис, 10. Схемы форсиру- Рис. 11. Мостовые схемы корректи-
ющих звеньев (2-й вариант) рующих звеньев: а - Т-образная
схема; б - двойной Т-образный мост
и соответственно
ρT = 1/((r2 + (r1 /r2))CΩ2)
Та же передаточная функция относится и к двойному Т- образному мосту, но в этом случае
ρ = (2 – γ)/(2 + γ + γ2); T = 2γ/((2 – γ)Ω); ρT = 2γ/(2 + γ + γ2)Ω
Если имеем настроенный мост, т. е. γ = 2, то ρ → 0, а T → ∞,
при этом постоянная ρТ приобретает фиксированное значение ρT= 1/2Ω.
В передаточной функции звена в этом случае можно пренебречь единицей по сравнению с jωcT. Обозначив ρT = Tд, получим
W(jω) = (ρjωcT)/(1 + jωc ρT) = (jωc Tд)/(1 + jωc Tд) (6.21)
т. е. этот фильтр не пропускает составляющую, пропорциональную входному воздействию и превращается в дифференцирующее звено с отставанием. Ему соответствует на постоянном токе звено, схема которого представлена на рис. 12. В связи с этим, если звено вводится последовательно в основную цепь, то его приходится видоизменять и использовать дополнительно делитель напряжения (рис.13).
Рис. 12. Дифференцирующее звено для коррекции на постоянном токе

Рис. 13. Двойной Т-образный мост, используемый как форсирующее звено
Корректирующие звенья переменного тока весьма чувствительны как к уходу несущей частоты, так и к нестабильности параметров самого звена. В обоих случаях на выходе появляется квадратурная составляющая, которая по величине может быть больше полезной. Следует иметь в виду, что более жесткие требования к стабильности частоты предъявляются в системах, работающих на частоте 400 Гц (по сравнению с 50 Гц), так как здесь важно не относительное изменение частоты, а абсолютное значение его отклонения, сопоставимое с частотой полезного модулирующего сигнала.
Для систем на промышленной частоте 50 Гц отклонение частоты не должно превышать 1-2%. Параметры корректирующих цепей подбираются с погрешностью, не превышающей 0,5-1% относительно расчетных значений.
Приведенные соображения в отдельных случаях приводят к необходимости применения адаптивных корректирующих цепей. При этом используется то обстоятельство, что при изменении знака ухода частоты фаза квадратурной составляющей изменяется на я.
Сложность настройки корректирующих звеньев, работающих на несущей частоте, вынуждает использовать корректирующие звенья постоянного тока, применяя схему демодулятор -фильтр - корректирующее звено - модулятор. В качестве модулятора обычно используется сам исполнительный двигатель.
Лекция 9