

Проектирование позиционных и следящих систем переменного тока системы переменного тока с частотным управлением
Частотное управление двигателями переменного тока выполняется в двух вариантах: с короткозамкнутыми асинхронными двигателями и с синхронными двигателями. Второй вариант в сочетании с полупроводниковыми преобразователями и жесткой обратной связью по углу поворота ротора представляет собой так называемый вентильный двигатель [21] с характеристиками, приближающимися к характеристикам коллекторного двигателя постоянного тока.
Аналогично системам постоянного тока системы с частотным управлением должны обеспечивать жесткие механические характеристики, широкий диапазон регулирования скорости, реверс двигателя и торможение его в режиме с рекуперацией [7]. Они могут строиться в двух вариантах: со звеном постоянного тока и с преобразователем типа НПЧ. Второй вариант обладает рядом недостатков и поэтому находит существенно меньшее применение.
Упрощенная схема системы частотного управления короткозамкнутым асинхронным двигателем представлена на рис. 6.1. Питание двигателя осуществляется от автономного инвертора напряжения (АИН), который на выходе обеспечивает напряжение переменного тока с частотой, регулируемой в широких пределах. Амплитуда напряжения может регулироваться как с помощью самого АЙН, так и посредством воздействия на выпрямитель, питающий цепи АЙН. Вместо АЙН может использоваться также широтно-импульсный преобразователь, желательно с напряжением на выходе, имеющим синусоидальную форму, что крайне существенно для систем с широким диапазоном регулирования скорости. Как правило, в ШИП применяется схема с симметричной модуляцией, в которой используются разнополярные импульсы. Реверс двигателя осуществляется за счет изменения последовательности работы вентилей, обеспечивающих частотное управление.

Рис. 1. Следящая система с частотным управлением асинхронным двигателем
При торможении запасенная энергия должна возвращаться в питающую сеть. Для этого параллельно с управляемым выпрямителем включен инвертор. Выпрямитель и инвертор должны работать при совместном включении. Для ограничения уравнительных токов использованы реакторы - индуктивности. Применяемые на практике более простые Схемы, предусматривающие гашение энергии замыканием входной цепи АИН на сопротивление или подключением аккумуляторов, для следящих систем непригодны. Рекуперативное торможение обеспечивает столь же жесткие механические характеристики, как и в двигательном режиме.
Фильтр в цепи питания АИН необходим для гашения гармонических составляющих на выходе выпрямителя.
Схемы управления системами с частотным управлением строятся на базе использования векторно-координатных преобразований согласно уравнениям Парка-Горева. При этом трехфазная машина как бы преобразуется в двухфазную. Токи двухфазного двигателя определяются согласно соотношениям:
ia
=
![]() iA
;
ib
=
(
iA
;
ib
=
(![]() iA
+
iB
)
iA
+
iB
)
где индексы А и В соответствуют трехфазной системе, а а и b - двухфазной.
Обратному преобразованию из двухфазного варианта выполнения двигателя в трехфазный отвечают формулы:
UA=Ua ;
UB=-
Ua+![]() Ub;
Ub;
UC= - Ua - Ub;
Преобразование числа фаз приходится использовать дважды: при преобразовании трехфазных токов машины в двухфазные и при обратном переходе для получения сигналов, необходимых для управления вентилями силового преобразователя.
В целях упрощения системы управления в последние годы промышленность стала выпускать специальные двигатели для частотного управления, выполняемые как двухфазные. При этом, естественно, двигатели несколько утяжеляются, так как активные материалы (сталь и медь) используются менее эффективны, зато система управления становится проще.
Для построения системы управления на базе уравнений Парка-Горева также требуется преобразование координат, первоначально от неподвижных к вращающимся, а затем наоборот. В системах с непрерывным (аналоговым) управлением для создания преобразователей обычно используются вращающиеся трансформаторы; возможно также применение преобразователей с множительными устройствами. В цифровых системах тригонометрические зависимости для синуса и косинуса формируются на базе ПЗУ, хранящих табличные данные тригонометрических функций.
На рис.1 показана следящая система с частотным управлением асинхронным двигателем [31]. Здесь используются координатные оси, вращающиеся синхронно с магнитным полем статора. При этом переменные токи статора преобразуются в постоянные, действующие по двум взаимоперпендикулярным осям. Токи, действующие по одной из осей, создают необходимый магнитный поток, а направленные по другой - опережающей оси, определяют величину момента, развиваемого двигателем.
При использовании системы координат, вращающейся синхронно с полем статора, получаем условия, соответствующие работе машины постоянного тока. При этом удается построить систему управления, получившую наименование векторного управления, аналогичную системе подчиненного управления, применяемую в электромеханических устройствах постоянного тока [27]. Для преобразования координат в системе используются устройства с блоками умножения (рис. 2).
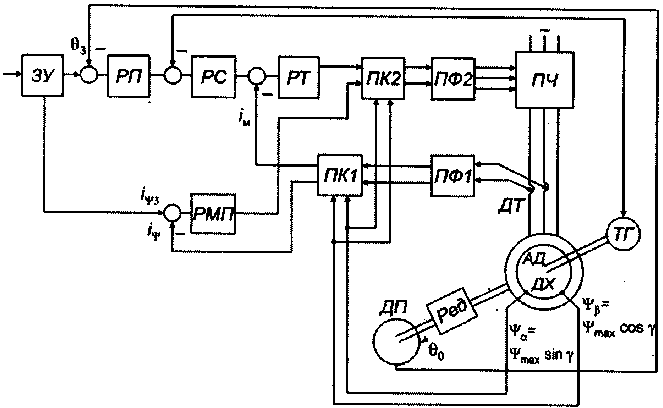
Рис. 2. Следящая система с векторным управлением асинхронным двигателем
ЗУ- задающее устройство; РП, PC, PT, РМП - регуляторы положения, скорости, тока, магнитного потока; ПФ1 и ПФ2 - преобразователи числа фаз; ПК1 и ПК2 -преобразователи координат; ПЧ - преобразователи частоты (АЙН или ШИП); ДП -датчик положения (рассогласования);ДТ-датчик тока; ДХ - датчик потока (Холла)
На вход преобразователя ПК1 подаются сигналы от датчиков тока после пересчета их на двухфазную систему и от датчиков Холла, поставляющих информацию о магнитном потоке в зазоре. Токи статора изменяются по гармоническому закону и являются функцией угла поворота координатных осей γ. На выходе преобразователя координат получаем величины, определяемые соотношениями:
iψ=iacosγ + iasinγ;
iM =iasinγ + ibcosγ,
где токи статора в двухфазном представлении являются функциями того же угла поворота координатных осей γ. После подстановки для стационарного режима получаем iψ = const и iM = const, где iψ - намагничивающий ток; iM - активная составляющая тока статора, определяющая момент двигателя.
В соответствии с изложенным скомпонована система управления, имеющая два канала. В канале перемещения (угол 6) имеются три регулятора, соответствующие трем контурам: тока, скорости и угла отработки, в канале магнитного потока- один. Преобразователи ПК2 и ПФ2 служат для обратного преобразования к неподвижным координатам статора и трехфазному построению силовой части привода, что необходимо для создания сигналов управления преобразователем частоты (АИН или ШИМ).

Рис. 3. Преобразователь координат
ia , ib - токи статора, соответствующие неподвижным координатным осям α, β;
iψ - ток намагничивания; iM - активная составляющая тока
Аналогично строится и система управления вентильным двигателем , причем за счет преобразования координат также оказывается возможным использование принципов построения системы подчиненного регулирования.
При синтезе приходится учитывать дополнительный контур, создаваемый за счет электромагнитных процессов в фильтре усилителя, питающего двигатель.
Синтез рассмотренных систем векторного управления осуществляется методами, отработанными для систем подчиненного регулирования. Расчет динамики систем достаточно сложен и, как правило, выполняется на моделях средствами компьютерной техники.
Наряду с классической системой частотного управления с автономным инвертором напряжения используется также система частотно-токового управления асинхронным двигателем (или синхронным). В этом случае в качестве преобразователя, питающего двигатель, применяется инвертор тока. Подобная электромеханическая система имеет мягкие характеристики (рис.4) и в разомкнутом виде может использоваться только для объектов с вентиляторной нагрузкой. Замкнутые системы с датчиками тока и положения ротора обеспечивают стабилизацию тока и соответственно момента. Достоинством системы является простота ее построения. Для ее функционирования требуются простые средства информации и весьма ограниченное число датчиков. Например, может отсутствовать датчик скорости; не требуется измеритель магнитного потока и т. д.
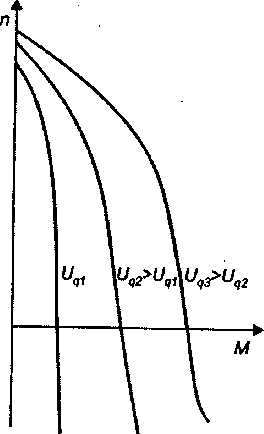
Для позиционных и следящих систем частотно-токовое управление мало пригодно хотя иногда и используется. К недостаткам его следует отнести отсутствие средств стабилизации скорости, обычно необходимых для отслеживания траектории, и средств обеспечения других режимов, используемых в позиционных системах.
Схема следящей системы с частотно-токовым управлением асинхронным двигателем в упрощенном двухфазном варианте представлена на рис. 6.5. На входе использован датчик рассогласования, построенный на сельсинах. Сигнал с датчика, последовательно проходя фазочувствительный усилитель ФЧУ и корректирующее звено КЗ, поступает на модулятор М. Напряжение повышенной частоты от модулятора используется для питания датчика углового положения ДУП. На вторую обмотку датчика поступает напряжение, сдвинутое на 90°. Напряжение датчика положения, в качестве которого применяется СКВТ, демодулируется в ФЧВ и используется для управления инвертором тока, который представляет собой усилитель с глубокой отрицательной связью.

Рис. 5. Упрощенная схема частотно-токового управления двухфазным асинхронным двигателем в режиме следящей системы
При расчете динамики привода с частотно-токовым управлением, если не учитывать электромагнитные процессы в двигателе и преобразователе, передаточную функцию можно представить как интегрирующее звено второго порядка. Следовательно, в системе обязательно применение корректирующего звена. При необходимости учета электромагнитных процессов следует принять во внимание один или два последовательно включенных апериодических звеньев. Два звена должны быть учтены, если возбуждение электромагнитного поля двигателя обеспечивается за счет преобразователя, питающего машину, т. е. применительно к асинхронному двигателю.
В связи со сложностью синтеза систем переменного тока часто отказываются от учета электромагнитных процессов, которые в системах переменного тока обычно не оказывают существенного влияния на переходные характеристики. При этом процесс синтеза существенно упрощается, так как учитывается только влияние механической инерции. Естественно, такой путь решения задачи может быть использован лишь в неответственных случаях для построения простейших систем, для которых не требуются высокие динамические свойства и обеспечение минимальной погрешности.
Лекция 8