

57. Линейные матричные неравенства, основные понятия.
58. Аппроксимация функций (моделирование) с помощью нейронных сетей (персептронов)
Рассмотрим задачу
реализации нелинейных алгебраических
зависимостей нейронными сетями.
Приведенный выше персептрон может
аппроксимировать произвольную гладкую
функцию. В качестве примера запишем
выходной сигнал сети с одним выходом
y
и одним входом u,
состоящей из одного скрытого слоя с
двумя нелинейными нейронами и выходного
слоя из одного линейного нейрона (с
линейной активационной функцией)
.
(28). Внутренние входы v1
и v2
скрытых нейронов определяются выражениями
.
(29). Пусть функция активации f
(v)
скрытых нейронов является функцией
tangh(v)
(гиперболический
тангенс). При этом график зависимости
y=g(u)
при
найденных
в результате
обучения
значениях весовых коэффициентов w0
, wh
и смещений
bh
можно
построить, как показано на рис. 8. Здесь
=
,
![]() =
-
,
=
=1.
=
-
,
=
=1.
Рис. 8
Изменяя веса и смещения в соответствии с обучающей выборкой,
получаем гладкую кривую, аппроксимирующую вход нейронной сети.
Эффективность использования нейронных сетей устанавливается
теоремой о полноте. Смысл этой теоремы в том (Cybenko, 1989), что
персептрон, по меньшей мере, с одним скрытым слоем, способен
аппроксимировать любую непрерывную функцию с
произвольной степенью точности при условии выбора достаточного числа
нейронов скрытого слоя.
59. Классификация генетических нечетких систем
Нечеткие системы успешно применяются в задачах моделирования и управления, и в значительном числе приложений. В большинстве случаев ключом для успешного применения служит способность нечетких систем встраивать знания экспертов.
Появилось 2 подхода к изучению нечетких систем, дополненных способностями к обучению:
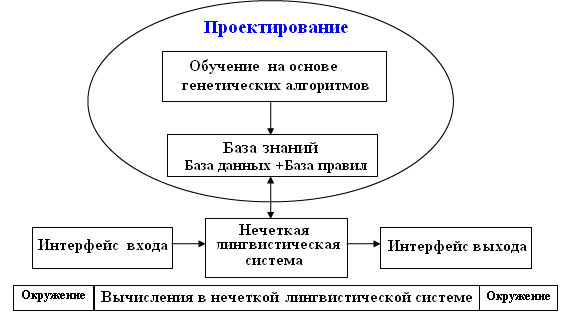
гибридизация, осуществленная в рамках мягких вычислений с помощью других технологий, таких как, нейронные сети и эволюционные вычисления, которые придают нечетким системам способность к обучению (рис. 5). Нейро-нечеткие системы являются одним из самых успешных и очевидных направлений этих усилий.
генетические нечеткие системы (ГНС).
ГНС в сущности представляет собой нечеткую систему, расширенную за счет процесса обучения, основанного на генетическом алгоритме (ГА). Самыми заметными приложениями ГНС являются генетические нечеткие лингвистические системы (ГНЛС), в которых генетический процесс обучает или настраивает различные компоненты нечетких лингвистических систем, т.е. систем построенных исключительно с помощью правил в отличие от нечетких систем Такаги-Сугено.
Недостатки проектирования нечетких лингвистических систем с помощью экспертов:
Не всегда можно найти сведущего эксперта;
Извлечение знаний из эксперта отнимает много времени;
Системы, построенные на приобретенных с помощью эксперта знаниях, работают плохо.
 Присущая ГА гибкость и способность
встраивать полученные от экспертов
знания являются весьма важным свойством
с точки зрения решаемых задач. Другие
подходы включают генетические
нейронечеткие системы и генетическую
нечеткую кластеризацию.
Присущая ГА гибкость и способность
встраивать полученные от экспертов
знания являются весьма важным свойством
с точки зрения решаемых задач. Другие
подходы включают генетические
нейронечеткие системы и генетическую
нечеткую кластеризацию.
Проектирование нечетких систем
Нечеткие системы включают два главных компонента:
1.Базу знаний (БЗ), в которой хранятся доступные или приобретенные знания о задаче, требующей решения, в форме нечетких правил;
2.Механизм инференции, использующий методы нечетких рассуждений, базирующиеся на базе правил и входных сигналах, для получения выходного сигнала системы.
Оба этих компонента должны быть спроектированы так, чтобы построить систему для конкретного приложения:
БЗ формируют из знаний экспертов или путем обучения с помощью машинных методов;
Механизм инференции строят путем выбора нечетких операторов для каждого компонента (конъюнкция, импликация, дефаззификация и т.п.).
В ряде случаев операторы также параметризуются и могут быть настроены автоматическими методами.
Проектирование БЗ затрагивает две подзадачи:
1. Определение базы данных (БД):
Универсум для переменных;
Масштабирующие коэффициенты или функции;
Число лингвистических терм для каждой переменной;
Функции принадлежности, описывающие термы.
2. Составление базы правил (БП): формулировка базовых правил. Как уже отмечено, существуют два различных метода для проектирования базы знаний (БЗ): информация от экспертов и с помощью нечеткого моделирования.
Классификация генетических нечетких систем
Первый шаг в проектировании ГНЛС решить вопрос о том, какая часть нечеткой системы подлежит оптимизации путем кодирования ее параметров в хромосомы. В этом разделе мы представим классификацию ГНЛС, соответствующую различным частям нечеткой системы, кодируемым с помощью генетической модели. Обычно методы проектирования ГНЛС разделяют на два процесса, настройка (т.е. адаптация) и обучение.
Генетическая настройка. Если существует БЗ, мы применяем процесс генетической настройки для улучшения свойств нечеткой системы, но не изменяем БП. Т.е. мы настраиваем параметры НЛС с целью улучшения ее свойств, сохраняя неизменной БП.
Генетическое обучение. Вторая возможность обучать компоненты БП, к которым можно отнести адаптацию механизма инференции. Т.е. мы затрагиваем обучение компонентов БП, наряду с другими компонентами НЛС.
Г
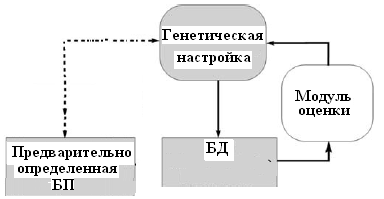 енетическая
настройка базы знаний. Осуществляется
путем определения предварительно вида
и параметров масштабирующих функций
входа и выхода, а также функций
принадлежности, и затем настройки этих
параметров и тем самым изменения формы
масштабирующих функций и функций
принадлежности с помощью ГА (рис.
справа).
енетическая
настройка базы знаний. Осуществляется
путем определения предварительно вида
и параметров масштабирующих функций
входа и выхода, а также функций
принадлежности, и затем настройки этих
параметров и тем самым изменения формы
масштабирующих функций и функций
принадлежности с помощью ГА (рис.
справа).Генетическое обучение базы правил. Генетическое обучение БП предполагает предопределенное множество функций принадлежности в БД, к которым правила обращается посредством лингвистических терм.
Имеется три главных подхода: питтсбургский, мичиганский и итеративный методы обучения. Питтсбургский «хромосома=набор правил», сохраняя неизменной популяцию кандидатов на роль правил и, используя селекцию, и генетические операторы для создания новых поколений наборов правил. Мичиганский «хромосома=правило» и набор правил представляется всей популяцией. В третьем случае, итеративном методе с помощью хромосом кодируют отдельные правила, и новое правило настраивается и добавляется в набор правил, итеративным способом.