

51. Структура интеллектуальной системы управления
И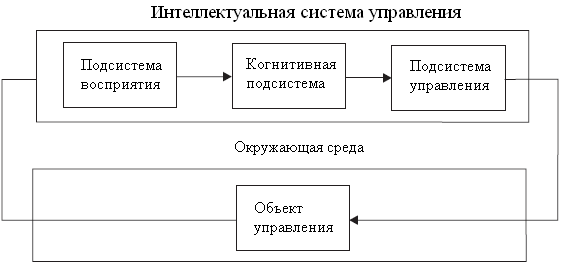 нтеллектуальная
система управления включает в себя
несколько подсистем (рис. 1).
нтеллектуальная
система управления включает в себя
несколько подсистем (рис. 1).
Подсистема восприятия
Эта система собирает информацию об объекте и об окружающей среде и преобразует ее в форму, удобную для использования когнитивной (познавательной) подсистемой. Основными элементами первой являются:
а) набор датчиков, которые обеспечивают исходные данные об объекте и об окружающей среде,
б) устройств обработки сигналов, которые преобразует информацию в удобную для дальнейшего использования форму,
в) интеграция данных, которая использует многомерное пространство данных для получения описания объекта и его окружения. Ключевой технологией здесь является распознавание образов.
Когнитивная (познавательная) подсистема
Когнитивная подсистема связана с принятием решения в условиях неопределенности. Ключевые операции включают в себя:
а) Нечеткий логический вывод (умозаключение), используя
1. базу знаний системы,
2. нечеткую логику;
б) Стратегию планирования, используя
1. вычисление оптимальной стратегии.
2. адаптивный поиск и генетические алгоритмы,
3. разработку и программирование (планирование) траектории движения;
в) Обучение, используя
1. супервизорное обучение в нейронных сетях,
2. несупервизорное обучение в нейронных сетях,
3. адаптивное обучение.
Подсистема управления
Исполнительные устройства применяют сигналы, полученные от познавательной подсистемы, чтобы перевести объект в желаемое состояние, В случае отказа исполнительного устройства (или датчика) интеллектуальная система управления должна обладать способностью искусно перестроить стратегию управления. В этом курсе мы рассмотрим главным образом процессы, связанные с когнитивной подсистемой. Следовательно, в данном курсе будет уделено внимание трем технологиям:
- технологии нечеткой логики, ориентированной на обработку логико-лингвистических моделей представления знаний с помощью продукционных (базовых) знаний и нечетких множеств. Эти технологии 1) обладают способностью фаззифицировать сложные ОУ в рамках лингвистических правил, 2) позволяют избежать применения сложных математических моделей, 3) создают долговременную память, тем самым имеют свойства обучения, 4) снижают уровень неопределенности при работе со сложными моделями;
- технологии нейросетевых структур с неявной формой представления знаний, скрытых в архитектуре сети, параметрах нейронов и связей. Эти технологии позволяют обучать нейронные сети онлайн и офлайн и настраивать их параметры;
- технологии нейронечетких систем, ориентированной на объединение в себе достоинств нейронных систем и систем с нечеткой логикой.
52. Многослойная нейронная сеть
М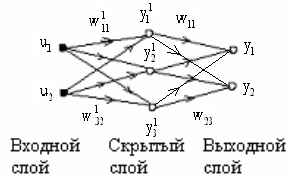 ногослойная
нейронная сеть включает в себя один
или несколько скрытых слоев, нейроны
которых называют скрытыми нейронами
(рис. 1). Граф на рис. 6 изображает
многослойную сеть с одним скрытым
нейроном. Когда мы говорим, что сеть
состоит из N слоев, мы
учитываем лишь скрытые слои и выходной
слой. Входной слой при этом не учитывается,
т.к. его узлы не отражают никаких действий
вычислительного характера. Однослойная
нейронная сеть, таким образом, состоит
из одного выходного слоя.
ногослойная
нейронная сеть включает в себя один
или несколько скрытых слоев, нейроны
которых называют скрытыми нейронами
(рис. 1). Граф на рис. 6 изображает
многослойную сеть с одним скрытым
нейроном. Когда мы говорим, что сеть
состоит из N слоев, мы
учитываем лишь скрытые слои и выходной
слой. Входной слой при этом не учитывается,
т.к. его узлы не отражают никаких действий
вычислительного характера. Однослойная
нейронная сеть, таким образом, состоит
из одного выходного слоя.
Найдем математическую модель
двухслойной сети, полагая, что в каждом
слое используется одна и та же
активационная
функция (функция активации f)
и что число входов n
и число выходов m.
Считаем, что скрытый слой содержит c
нейронов. Для двухслойной
нейронной сети, представленной на рис.
6, n=m=2,
c=3.
Ради простоты мы не показываем смещения
нейронов. В нейронах скрытого слоя,
во-первых, вычисляется взвешенная сумма
входных сигналов u1
и u2
, так что
внутренний сигнал
i-го
нейрона этого слоя определяется как
 .
(4a).
Затем используется нелинейная
активационная функция f,
чтобы вычислить
выходной
сигнал i-го
нейрона скрытого слоя
.
(4a).
Затем используется нелинейная
активационная функция f,
чтобы вычислить
выходной
сигнал i-го
нейрона скрытого слоя
 .
(4b)
.
(4b)
Заметим, что активационные функции вводят в нейронную сеть нелинейности и при этом придают ей устойчивость в работе. Выходной сигнал активационной функции в общем случае проходит непосредственно на выход i-го нейрона скрытого слоя (хотя имеются исключения, когда используется динамический фильтр), после чего он поступает на входы нейронов следующего слоя посредством весовых коэффициентов. Для двухслойной сети следующим слоем является выходной слой, так что внутренний сигнал j-го нейрона этого слоя определяется как
 .
(4c)
.
(4c)
Затем с помощью активационной функции выходного слоя окончательно формируется выходной сигнал j-го нейрона, другими словами, j-й выходной сигнал нейронной сети
 .
(4d)
.
(4d)
Несмотря на простоту рассмотренной структуры, эта модель нейронной сети весьма универсальна. Показано, что нейронная сеть с одним скрытым слоем, может аппроксимировать любую непрерывную функцию с любой степенью точности (если имеется достаточное число нейронов в скрытом слое). Следует сказать, что нейронная сеть с двумя скрытыми слоями может аппроксимировать всецело любую функцию.
Различают два режима работы нейронной сети рабочий режим и режим обучения.
В рабочем режиме имеет место прямое распространение сигнала от входа к выходу. Хотя применяются нейронные сети с обратной связью, мы ограничимся лишь изучением многослойной сети с однонаправленным распространением входного сигнала (персептрона). В режиме обучения используется как прямое, так и обратное распространение сигнала, которое сводится к тому, что сигнал ошибки e=d-y=(e1,…,em) между желаемым d=(d1,…,dm) и действительным y=(y1,…,ym) значениями выхода используется для подстройки весов и смещений выходного и скрытого слоев.