

14. Теорема о проекциях скоростей двух точек тела:
Определение скоростей точек плоской фигуры (или тела, движущегося плоскопараллельно) связано обычно с довольно сложными расчетами. Однако можно получить ряд других, практически более удобных и простых методов определения скоростей точек фигуры (или тела)

Один из таких
методов дает теорема: проекции
скоростей двух точек твердого тела на
ось, проходящую через эти точки, равны
друг другу. Рассмотрим какие-нибудь две
точки А
и В
плоской фигуры (или тела). Принимая точку
А за полюс
(рис.32), получаем
![]() .
Отсюда, проектируя обе части равенства
на ось, направленную по АВ,
и учитывая, что вектор
.
Отсюда, проектируя обе части равенства
на ось, направленную по АВ,
и учитывая, что вектор
 перпендикулярен
АВ,
находим
перпендикулярен
АВ,
находим
 и
теорема доказана.
и
теорема доказана.
15. Мгновенный центр скоростей. Теорема о существовании и единстве м.Ц.С.:
Проекции
скоростей двух точек твердого тела на
прямую, с оединяющую
эти точки, равны между собой:
оединяющую
эти точки, равны между собой:
|
(1) |

Докажем теорему методом от противного. Предположим, что равенство (1) не выполняется и проекции скоростей на прямую AB (рис. 70) не равны между собой. Тогда с течением времени расстояние между точками A и B будет меняться, то есть AB = var, а этого быть не может, так как мы рассматриваем твердое тело. Следовательно, наше предположение не верно, а верно равенство (1), и теорема доказана.
По доказательству мы видим, что теорема не зависит от вида движения тела, главное чтобы тело было твердым.
Мгновенный центр ускорений:
При непоступательном
движении плоской фигуры у нее в каждый
момент времени имеется точка Q,
ускорение которой равно нулю. Эта точка
называется мгновенным центром ускорений.
Определяется положение центра Q,
если известны ускорение
![]() какой-нибудь
точки А
фигуры и величины
и
,
следующим путем:
какой-нибудь
точки А
фигуры и величины
и
,
следующим путем:
1) находим значение
угла
![]() ,
из формулы
,
из формулы
![]() ;
;
2) от точки А под углом , к вектору проводим прямую АЕ;
при этом прямая АЕ должна быть отклонена от в сторону вращения фигуры, если вращение является ускоренным, и против вращения, если оно является замедленным, т. е. в сторону направления углового ускорения ;
3) откладываем вдоль линии АЕ отрезок AQ, равный
 .
.

16. Определение скоростей точек тела с помощью м.Ц.С.:
Пусть в данный момент t в точке А и В лежащие в сечении S (плоская фигура) имеет va и vВ. При чём эти скорости параллельны друг другу, тогда найдём МЦС как точку лежащую на перпендикулярах построенной из точек А и В к этим скоростям. Таким образом положение МЦС найдём зная vа а так же направление скорости в точки В.
Зная vа и положение МЦС определим скорость в любой в точке тела.
![]() АВ=
VA/AP=VB/AP=VC/AP
АВ=
VA/AP=VB/AP=VC/AP
АВ=
17. Частные случаи определения м.Ц.С:
Качение без скольжения плоской фигуры по неподвижной плоскости. В этом случав м.ц.с. (т. Ρ) лежит в точке касания.
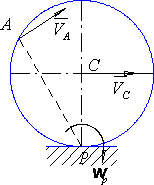

 В этом случае
м.ц.с. (т. Р) лежит в бесконечности. Величина
В этом случае
м.ц.с. (т. Р) лежит в бесконечности. Величина
![]() = 0 и скорости всех точек тела в данный
момент равны между собой. Имеем мгновенное
поступательное движение:
= 0 и скорости всех точек тела в данный
момент равны между собой. Имеем мгновенное
поступательное движение:
![]()
3 .
.
![]()
Мгнов-ый центр ск-тей нах-ся в точке пересечения общего перпендикуляра к скоростям и пряной, соединявшей концы векторов скоростей.