

39. Метод Виттенбеуэра. Диаграмма «энергия-масса». Назначение диаграммы.
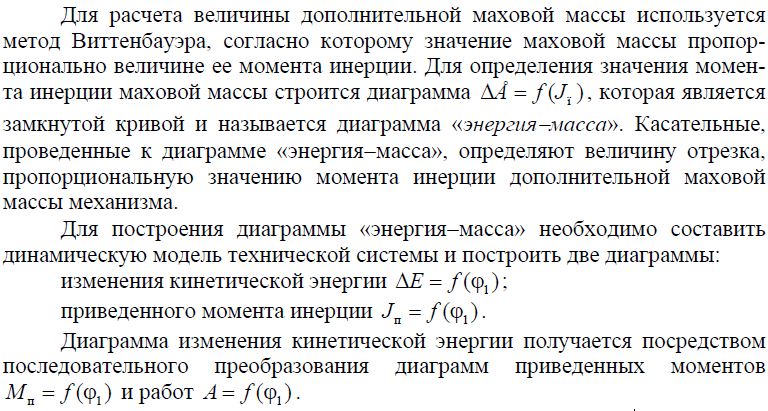
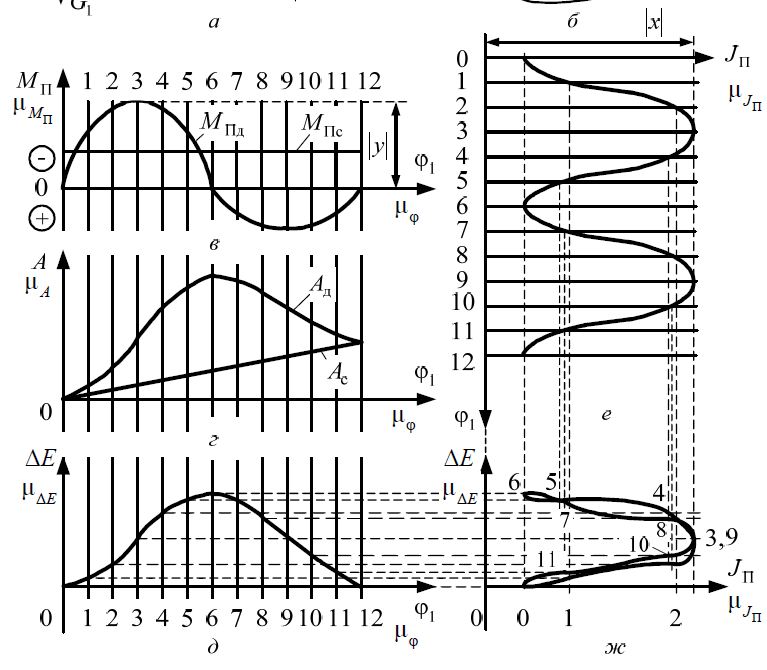
Для определения момента инерции маховой массы к диаграмме «энер-
гия−масса» до пересечения с осью ΔЕ проводятся касательные. Углы наклона
касательных соответствуют максимальному и минимальному значениям уг-
ловой
скорости ведущего звена механизма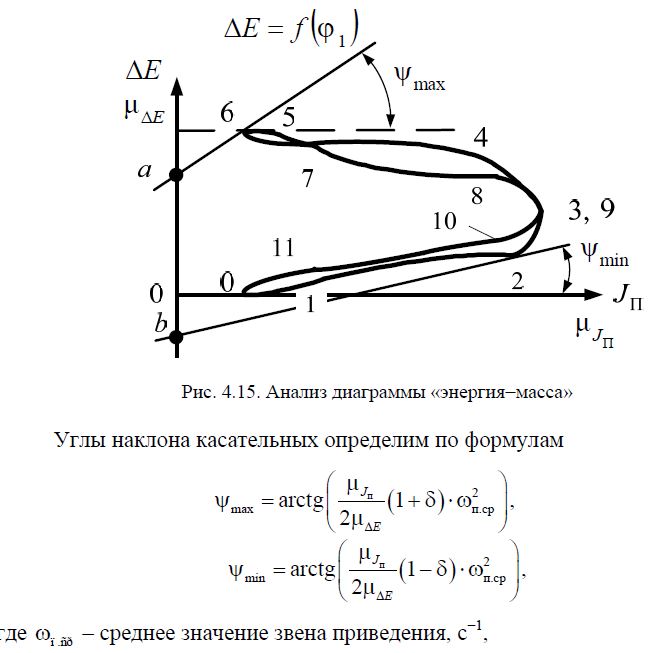
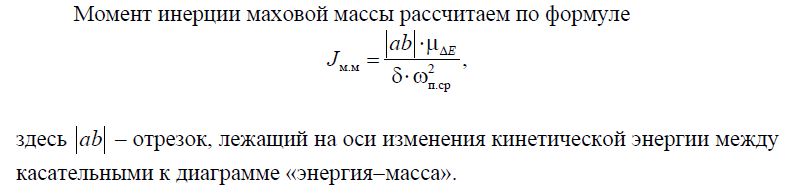
Назначение диаграммы – определение момента инерции маховой массы, чтобы можно было ввести в систему дополнительный момент инерции маховой массы, для реализации более равномерного хода механизма.
40.Механизмы с высшей кп. Классификация механизмов с высшей кп. Примеры.
Механизм с высшей кинематической парой − это механизм, структура
которого содержит хотя бы одну высшую кинематическую пару.
К типовым механизмам данного вида относятся:
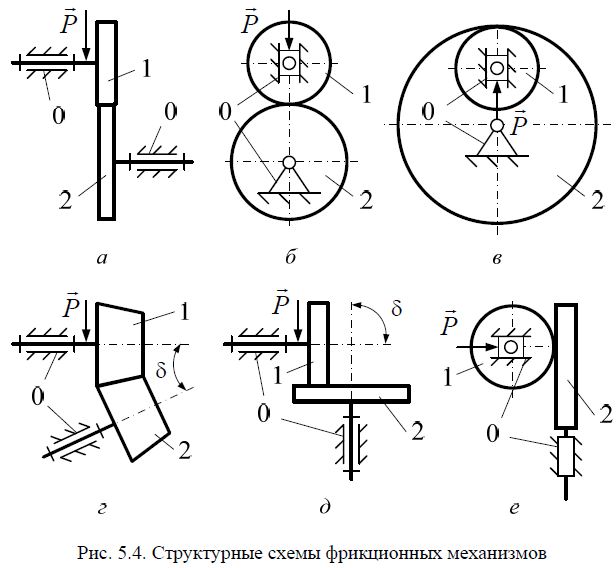
механизмы фрикционные (рис. 5.4, рис.5.5);
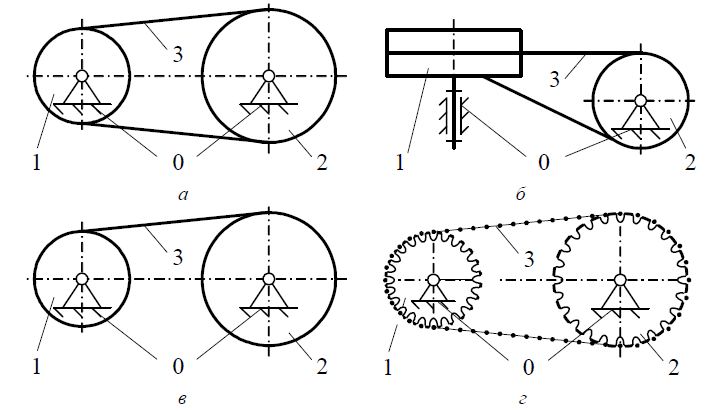
механизмы с гибкими звеньями (рис. 5.6, рис.5.7);
механизмы мальтийские (рис. 5.8, а);
механизмы поводковые (рис. 5.8, б);
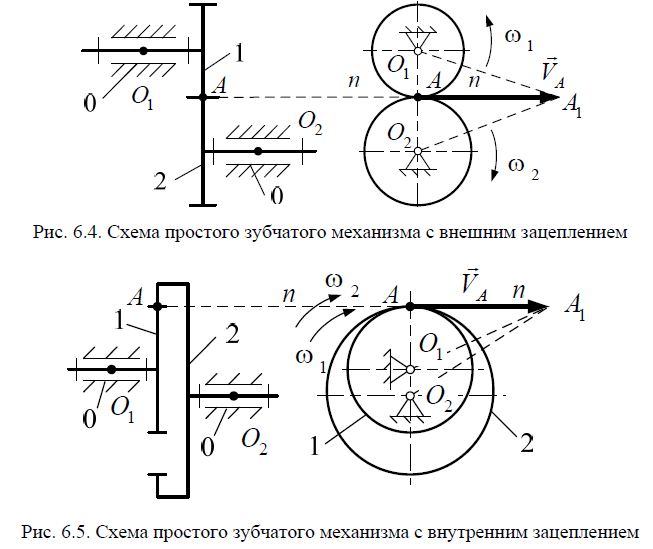
механизмы зубчатые (рис. 6.1, рис.6.4, рис.6.5, рис.6.6);
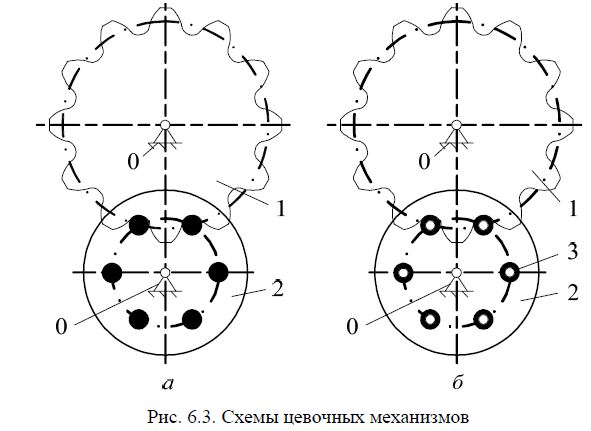
механизмы цевочные (рис. 6.3.);
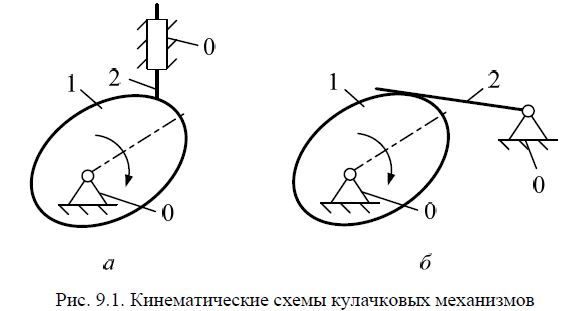
механизмы кулачковые (рис. 9.1).
Фрикционный механизм − это механизм с высшей кинематической па-
рой, в котором передача движения и преобразование силовых факторов осу-
ществляется за счет сил трения или сцепления.
В механизмах с гибкими звеньями преобразование движения и силовых
факторов осуществляется посредствам изменения формы рабочих поверхно-
стей гибкого звена.
Мальтийский механизм – это механизм, содержащий кривошип,
имеющий специальный выступ-палец прерывисто сцепляющийся с пазом
выходного звена.
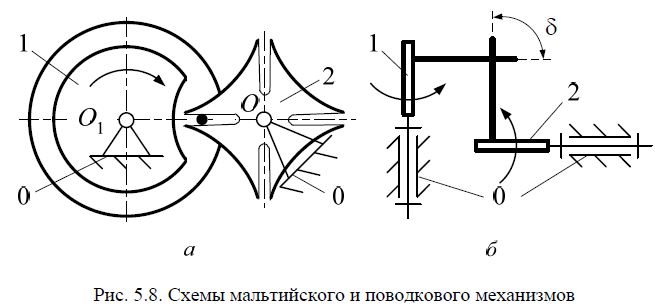
Поводковый механизм – это механизм, подвижные звенья которого
имеют специальные цилиндрические выступы-пальцы.
Зубчатый механизм – это механизм с высшей кинематической парой, в
структуру которого входят звенья, снабженные специальными выступами-
зубьями.
Цевочный механизм – это механизм с параллельными геометрическими
осями вращения звеньев, одно из которых имеет специальные цилиндриче-
ские выступы-цевки.
Кулачковый механизм − это механизм с высшей кинематической парой,
обладающий возможностью обеспечения выстоев выходного звена, а структура
содержит хотя бы одно звено с рабочей поверхностью переменной кривизны.
41.Теорема о высшей кинематической паре
Поверхности звеньев, образующих высшую кинематическую пару и
обеспечивающие заданные законы их относительного движения, называются
сопряженными, или начальными.
На относительное движение начальных поверхностей звеньев наклады-
вается ограничение, которое называется теоремой о высшей кинематической
паре: в каждой точке касания начальных поверхностей, вектор скорости VP
этой точки лежит на перпендикуляре к общей нормали n−n, проведенной че-
рез точку касания (рис. 5.1).
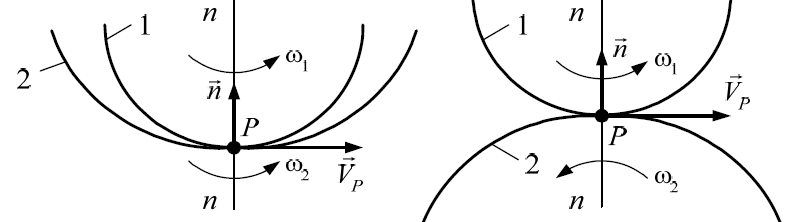
Рис. 5.1. Вектор скорости точки контакта сопряженных поверхностей
Условие основной теоремы высшей пары:
в векторном виде
VP ⋅n= 0
в аналитическом виде
VP⋅n⋅cos(VP, n)=0
где n– единичный вектор, направленный по общей нормали n−n.
Теорема доказывается «от противного». Если условие теоремы не вы-
полняется, т. е. вектор скорости точки контакта начальных поверхностей не
лежит на перпендикуляре к общей нормали, тогда имеется составляющая
этой скорости, направленная по общей нормали. В этом случае происходит
либо отрыв одной поверхности от другой, либо внедрение этих поверхностей
друг в друга, что недопустимо для существования кинематической пары как
подвижного соединения. Следовательно, составляющая скорости точки кон-
такта начальных поверхностей не действует по общей нормали, а это воз-
можно только при условии, что вектор скорости этой точки лежит на перпен-
дикуляре к общей нормали, т. е. условие теоремы выполняется. Теорема до-
казана.
ОСНОВНАЯ ТЕОРЕМА СОПРЯЖЕНИЯ (ЗАЦЕПЛЕНИЯ)
В плоских механизмах с высшими кинематическими парами вместо со-
пряженных или начальных поверхностей рассматривают сопряженные или
начальные профили (окружности).
Сопряженные или начальные профили − это кривые, получаемые в се-
чении сопряженных или начальных поверхностей плоскостью, проведенной
параллельно плоскости их движения.
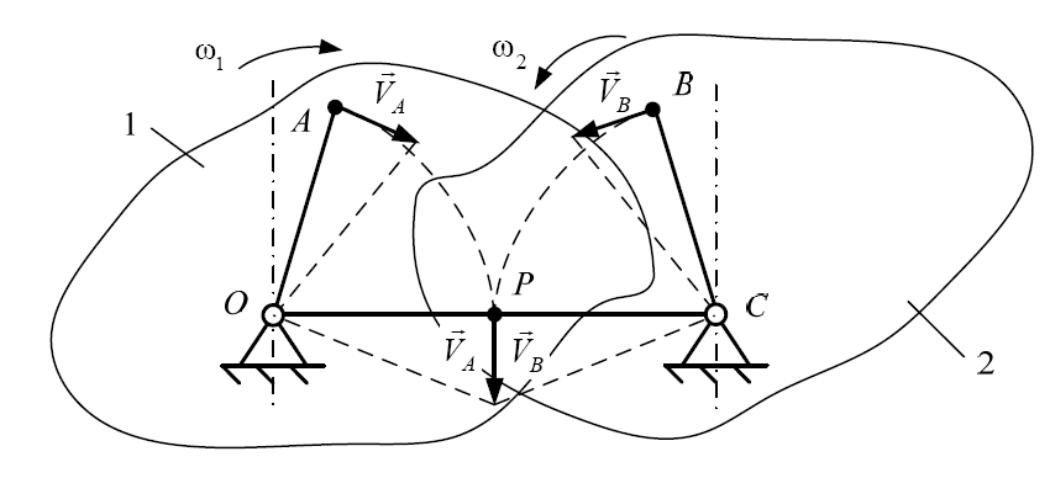
Пусть звенья 1 и 2 плоского механизма с высшей кинематической парой
совершают вращательные движения вокруг параллельных осей в разных направ-
лениях (рис. 5.3). При этом точка А принадлежит звену 1, а точка В – звену 2.
Значения скоростей точек А и В выражаются:
Звенья 1 и 2 образуют высшую кинематическую пару, следовательно,
контакт начальных профилей рассматриваемых звеньев имеет место в полюсе сопряжения P. Полюс сопряжения P является мгновенным центром скоро-
стей в относительном движении звеньев.
 рис
5.3
рис
5.3
Из теоремы о высшей кинематической паре следует: вектора скоростей
точек контакта начальных профилей, расположенные в полюсе сопряжения,
действуют по прямой, являющейся перпендикуляром к общей нормали. Об-
щая нормаль начальных поверхностей совпадает с прямой ОС, следователь-
но, полюс P должен лежать на перпендикуляре к этой прямой. Кроме того,
мгновенный центр P должен лежать на прямой ОС, т. к. только в точках этой
прямой вектора скоростей точек А и В имеют одинаковое направление. В по-
люсе сопряжения скорость относительного движения звеньев 1 и 2 равна ну-
лю, а скорости точек А и В равны друг другу:
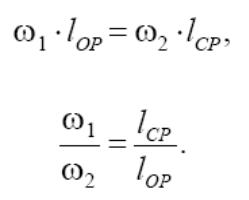
Из проведенного анализа следует: общая нормаль в точке касания на-
чальных профилей проходит через полюс сопряжения P, который делит ме-
жосевое расстояние ОС на части, отношение значений которых обратно про-
порционально отношению угловых скоростей звеньев.
В теории зубчатых механизмов сделанный вывод носит название ос-
новной теоремы зацепления, которая доказана Виллисом. Основная теорема
зацепления рассматривает отношение угловых скоростей звеньев, которое
называется кинематическим передаточным отношением:
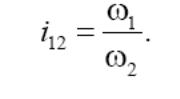
Полученное выражение определяет основное свойство теоремы зацеп-
ления, которая имеет следующую формулировку: передаточное отношение
звеньев, совершающих вращательные движения, прямо пропорционально от-
ношению угловых скоростей и обратно пропорционально отношению рас-
стояний от центров вращения до полюса.
42. ЗУБЧАТЫЕ МЕХАНИЗМЫ
Зубчатый механизм – это механизм с высшей кинематической парой, в
структуру которого входят звенья, снабженные специальными выступами-
зубьями.
Зубчатые механизмы обладают рядом полезных свойств, обусловивших
их широкое распространение практически во всех видах машин.
Однако наибольшее распространение зубчатые механизмы получили в каче-
стве передаточных или преобразующих устройств, используемых в более
сложных технических системах для согласования характеристик рабочей и
энергетической машин.
Зубчатые механизмы предназначены для передачи вращательного
движения между звеньями, а также для изменения значений угловой ско-
рости и силовых факторов. Зубчатые механизмы, предназначенные для
уменьшения угловой скорости выходного звена с одновременным повы-
шением крутящего момента по сравнению с входными значениями этих
параметров, называются редукторами, а зубчатые механизмы, предназна-
ченные для увеличения угловой скорости с потерей значения крутящего
момента на выходном звене, – мультипликаторами.
Типовой зубчатый механизм состоит из стойки и двух подвижных
звеньев, которые называются зубчатыми колесами.
Зубчатое колесо − это звено зубчатого механизма, снабженное специ-
альными выступами-зубьями.
В зависимости от особенностей структуры, все зубчатые механизмы
подразделяются на два вида: простые и сложные.