

58. Формула Виллиса
Формула
Виллиса выводится на основании основной
теоремы зацепления и устанавливает
соотношение между угловыми скоростями
зубчатых колес в планетарном механизме.
Рассмотрим простейший планетарный
механизм с одним внешним зацеплением
(см. рис. 15.3). Число подвижностей в этом
механизме равно![]() то
есть для получения определенности
движения звеньев механизма необходимо
сообщить независимые движения двум его
звеньям. Рассмотрим движение звеньев
механизма относительно стойки и
относительно водила. Угловые скорости
звеньев в каждом из рассматриваемых
движений приведены в таблице 15.2.
то
есть для получения определенности
движения звеньев механизма необходимо
сообщить независимые движения двум его
звеньям. Рассмотрим движение звеньев
механизма относительно стойки и
относительно водила. Угловые скорости
звеньев в каждом из рассматриваемых
движений приведены в таблице 15.2.

В движении звеньев относительно водила угловые скорости звеньев равны угловым скоростям в движении относительно стойки минус угловая скорость водила. Если в движении относительно стойки ось зубчатого колеса 2 подвижна, то в движении относительно водила оси обоих зубчатых колес неподвижны. Поэтому к движению относительно водила можно применить основную теорему зацепления.
Движение механизма относительно стойки

Движение механизма относительно водила

То есть можно записать выражение, которое называется формулой Виллиса для планетарных механизмов
![]()
69) Кулачковые механизмы. Звенья кулачковых механизмов. Типовые схемы. Виды профилей кулачка. Примеры.
Кулачковый механизм − это механизм с высшей кинематической парой, обладающий возможностью обеспечения выстоев выходного звена, а структура содержит хотя бы одно звено с рабочей поверхностью переменной кривизны. Кулачковые механизмы предназначены для преобразования движения ведущего звена в требуемый вид движения выходного звена согласно заданному закону.
Схема типового кулачкового механизма имеет структуру, содержащую стойку и два подвижных звена (рис. 9.1). При этом в кулачковом механизме при двух подвижных звеньях можно реализовать преобразование движения и силовых факторов по закону любой сложности.
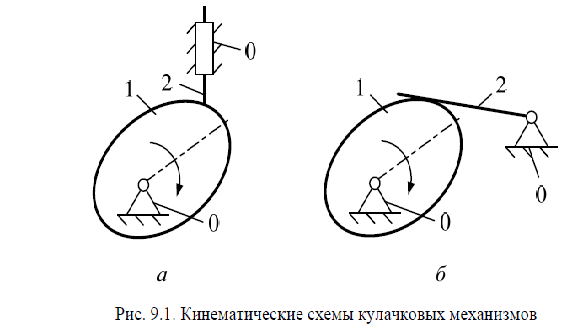
В типовых схемах кулачковых механизмов ведущее звено называется кулачком, а в качестве выходного звена выступает толкатель (рис. 9.1, а)
или коромысло (рис. 9.1, б).
Кулачок – это звено кулачкового механизма, имеющее рабочую поверхность переменной кривизны.
Толкатель – это выходное звено кулачкового механизма, совершающее поступательные движения.
Коромысло – это выходное звено кулачкового механизма, совершающее только вращательные движения и не имеющее возможности осуществления поворота на угол более 360°.
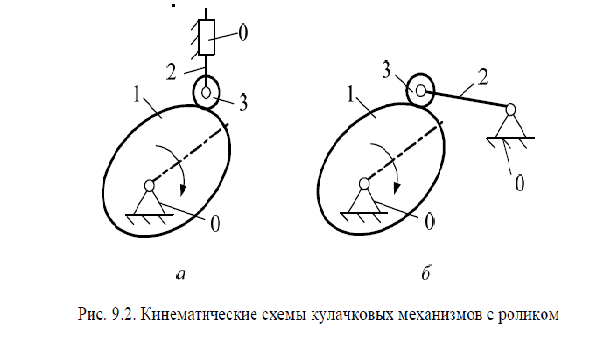
В кулачковых механизмах преобразование движения и силовых факторов осуществляется путем непосредственного касания рабочей поверхности кулачка с поверхностью выходного звена. В этом случае вследствие разности скоростей движения контактирующих звеньев в зоне их контакта имеет мести трение скольжения, что приводит к интенсивному износу этих поверхностей, а также к росту потерь, уменьшению КПД и ресурса работы кулачкового механизма. Для замены в высшей кинематической паре трения скольжения на трение качения в схему кулачкового механизма вводят дополнительное звено, которое называется роликом. Ролик образует с выходным звеном одноподвижную кинематическую пару 5-го класса (рис. 9.2). Подвижность этой кинематической пары не оказывает влияния на передаточную функцию кулачкового механизма и является местной подвижностью.
При введении в схему дополнительного звена – ролика − преобразование движения и силовых факторов осуществляется посредствам соприкосновения рабочей поверхности кулачка с поверхностью ролика, который взаимодействует с выходным звеном. В этом случае кулачок имеет два вида профилей (рис. 9.3): конструктивный и теоретический.
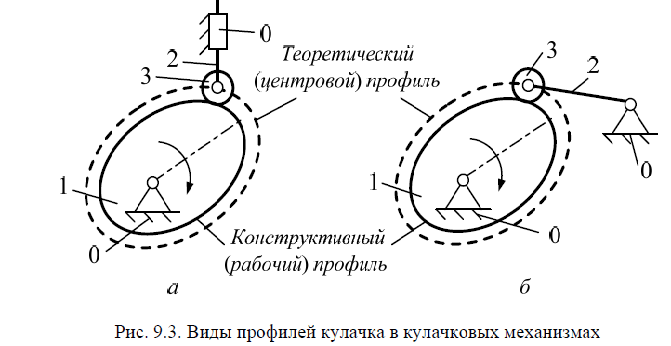 Конструктивный
(рабочий) профиль – это наружный профиль
кулачка.
Конструктивный
(рабочий) профиль – это наружный профиль
кулачка.
Теоретический (центровой) профиль – это профиль, который описывает центр ролика при его перекатывании без скольжения по конструктивному профилю кулачка.