35. Динамический анализ плоских механизмов. Режимы движения.
Динамический анализ – это вид исследования подвижных технических
систем, изучающий процессы, протекающие в этих системах под действием
силовых факторов в функции времени.
Режимы движения технической системы
Любая техническая система, находясь в неподвижном состоянии, обла-
дает некоторым объемом кинетической энергии, обеспечивающим существо-
вание этой системы (рис. 4.13). Для начала движения технической системе
необходимо сообщить дополнительный объем кинетической энергии, совер-
шив работу над этой системой. В зависимости от вида работы, совершаемой
внешними силовыми факторами, для любой технической системы различают
три
режима движения: разгон, установившееся
движение и торможение.
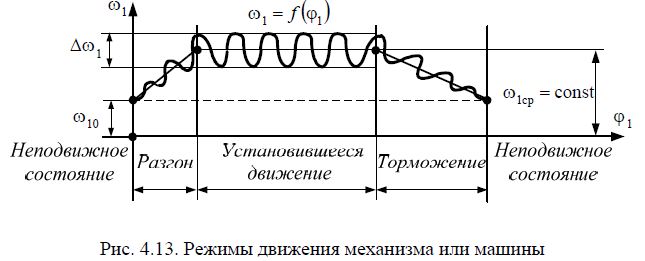
Разгон – это режим движения технической системы, при котором рабо-
та движущих сил больше работы сил сопротивления:
Ад > Ас ,
следовательно, суммарная работа механизма в режиме разгона всегда поло-
жительная, т. е.
А 0 Σ > .
Установившееся движение – это режим движения механизма, при ко-
тором работа движущих сил равна работе сил сопротивления:
Ад = Ас,
следовательно, суммарная работа механизма в режиме установившегося
движения равна нулю, т. е.
АΣ = 0.
Торможение – это режим движения механизма, при котором работа
движущих сил меньше работы сил сопротивления:
Ад < Ас,
следовательно, суммарная работа механизма в режиме разгона всегда отри-
цательная, т. е.
АΣ < 0.
Режимы «разгон» и «торможение» сопровождаются переходными про-
цессами и в зависимости от структуры технической системы и характера
действия силовых факторов протекают в период от нескольких долей до де-
сятков секунд. Основным режимом движения является режим установивше-
гося движения, т. к. на этом режиме осуществляется выполнение служебного
назначения технической системы. На режиме установившегося движения ве-
дущее звено технической системы находится под воздействием внешних си-
ловых факторов и в каждый момент времени имеет разное значение скорости
движения. Мгновенное значение скорости движения ведущего звена техни-
ческой системы формируется соотношением двух групп внешних силовых
факторов: движущих силовых факторов и силовых факторов сопротивления.
Величина движущих силовых факторов определяется параметрами энергети-
ческой машины и данной системы, а значение силовых факторов сопротив-
ления формируется условиями эксплуатации технической системы.
36. Метод приведения. Приведение силовых факторов. Пример.
Для составления динамической модели воспользуемся методом приве-
дения(Все внешние силы, действующие на звенья при этом заменяются одной приведенной силой F∑пр или моментом М∑пр). В качестве звена приведения выберем кривошип 1, а за точку приве-
дения примем подвижную точку А этого звена (рис. 4.14, б). Для двигателя
внутреннего сгорания (рис. 4.14, а) характерно следующее соотношение при-
веденных моментов сил:
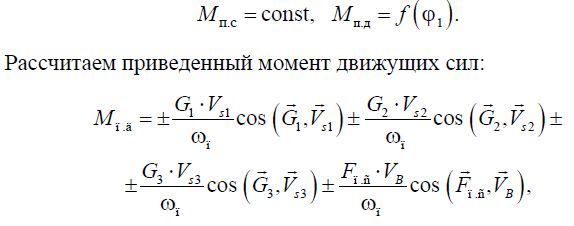
где знак «+» выбирается в случае, если вектор силы и вектор скорости точки
приложения этого вектора совпадают по направлению, «−» – если направле-
ние этих векторов противоположно друг другу.
Приведенный момент сил сопротивления является постоянной величи-
ной и действует на протяжении всего цикла работы механизма:
где s – число положений звена приведения за промежуток времени.