

18). Основні невідомі методу переміщень
Як уже зазначалось, вузли вихідної системи при її навантаженні мають переміщення, виключені в’язями, накладеними при створенні основної системи. Саме ці переміщення обираються як основні невідомі методу переміщень.
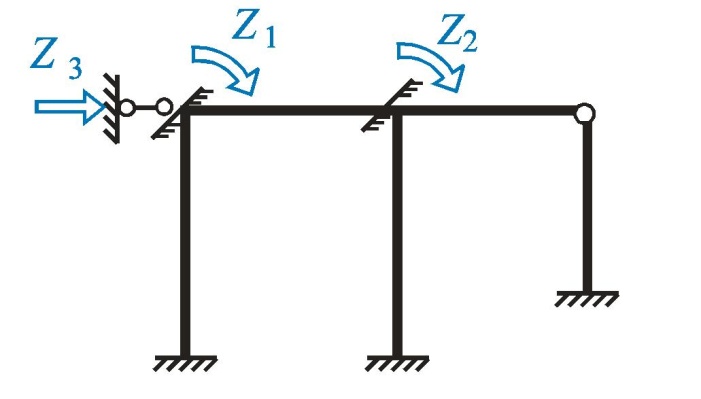
Таким чином, основними невідомими методу переміщень є кути повороту жорстких вузлів системи та незалежні поступальні переміщення її вузлів. Ці невідомі при використанні канонічної форми методу переміщень позначаються літерами Zi (і = 1,2,3,...).
Наприклад, основна система і основні невідомі методу переміщень для рами (рис.12.5,а) зображені на рис.12.10.
Для зручності обчислень доцільно спочатку нумерувати невідомі кутові переміщення, а потім - поступальні, хоча принципово це не має жодного значення.
Кількість основних невідомих методу переміщень називається ступенем кінематичної невизначуваності системи. Її можна визначити за формулою
![]()
де kj - кількість кутових переміщень жорстких вузлів системи, kd - кількість незалежних поступальних переміщень її вузлів.
Таким чином, ступінь кінематичної невизначуваності дорівнює мінімальній кількості додаткових в’язей, які повністю закріплюють вузли системи від можливих кутових і поступальних переміщень
19). Основна система методу переміщень
Розрахунок статично невизначуваної системи полягає в тому, що замість неї розглядається така створена з неї система, розрахунок якої можна здійснити за допомогою вже відомих нам засобів. Така нова система називається основною системою методу.
для одержання основної системи методу переміщень перетворити вихідну систему в набір однопрогонових балок постійної жорсткості з нерухомими опорами, які не дають змоги кінцям балок мати кутові та поступальні переміщення. Для цього необхідно усунути можливість переміщень усіх вузлів системи. Цієї мети досягають введенням у вузли системи додаткових з’єднань двох видів.
Розглянемо докладно ці додаткові з’єднання.
1. Для запобігання повороту всіх жорстких вузлів до них встановлюються так звані рухомі, або “плаваючі” затиснення. Це такі умовні в’язі, які не дозволяють вузлам повертатись, але не заважають їх поступальним переміщенням.
2. Можливі поступальні переміщення вузлів системи виключаються встановленням додаткових опорних стержнів. Кількість таких стержнів повинна бути мінімальною, але достатньою для забезпечення нерухомості всіх вузлів системи.
Отже, додаткові опорні стержні потрібно встановлювати не до всіх вузлів системи, а лише до тих, що мають незалежні поступальні переміщення. Для визначення кількості незалежних поступальних переміщень системи та місць встановлення необхідних додаткових опорних стерж-нів доцільно скористатися її шарнірною схемою. Шарнірна схема утворюється введенням наскрізних шарнірів в усі жорсткі вузли вихідної системи, включно з опорними вузлами. Зауважимо, що при створенні шарнірної схеми статично визначувані фрагменти споруди, зокрема консолі можна відкидати. Надалі здійснюють кінематичний аналіз одержаної шарнірної схеми і визначаются місця постановки додаткових опорних стержнів для перетворення її на геометрично незмінювану, причому доцільно одразу виконувати якісний (структурний) етап аналізу. Геометрична незмінюваність шарнірної схеми свідчить про те, що вихідна система не має незалежних поступальних переміщень. У такому разі при створенні основної системи методу переміщень, встановлювати додаткові опорні стержні не потрібно.