

Динамическое торможение
Э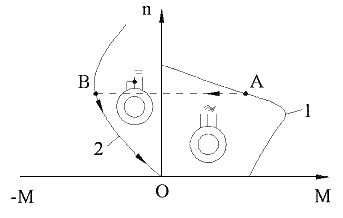 тот
тормозной режим используется для точной
остановки мощных двигателей. На время
торможения обмотка статора отключается
от сети переменного напряжения и
подключается и источнику с постоянным
напряжением. При этом обмотка статора
будет создавать постоянное неподвижное
магнитное поле. При вращении ротора
относительно этого магнитного поля
изменяется направление ЭДС и тока
ротора, что приведет к изменению
направления электромагнитного момента,
т.е. он станет тормозным. Под действием
этого момента происходит торможение.
Изменяя величину подведенного к обмотке
статора напряжения, можно регулировать
время торможения. Основным достоинством
этого тормозного режима является точная
остановка. Постоянное напряжение можно
подводить к обмотке статора только на
время торможения. После остановки
двигатель нужно отключить от сети
постоянного тока.
тот
тормозной режим используется для точной
остановки мощных двигателей. На время
торможения обмотка статора отключается
от сети переменного напряжения и
подключается и источнику с постоянным
напряжением. При этом обмотка статора
будет создавать постоянное неподвижное
магнитное поле. При вращении ротора
относительно этого магнитного поля
изменяется направление ЭДС и тока
ротора, что приведет к изменению
направления электромагнитного момента,
т.е. он станет тормозным. Под действием
этого момента происходит торможение.
Изменяя величину подведенного к обмотке
статора напряжения, можно регулировать
время торможения. Основным достоинством
этого тормозного режима является точная
остановка. Постоянное напряжение можно
подводить к обмотке статора только на
время торможения. После остановки
двигатель нужно отключить от сети
постоянного тока.
На рис. 3 показаны схемы включения асинхронного двигателя и механические характеристики при динамическом торможении.
Пусть двигатель работает с нагрузкой в точке A. При подаче на обмотку статора постоянного напряжения рабочая точка перейдет из точки A в точку B тормозной характеристики 2.
Под действием тормозного электромагнитного момента будет происходить снижение частоты вращения до полной остановки (точка 0).
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные на рисунке, из которых схема «а» применяется при наличии сети постоянного тока, а схема «б» — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
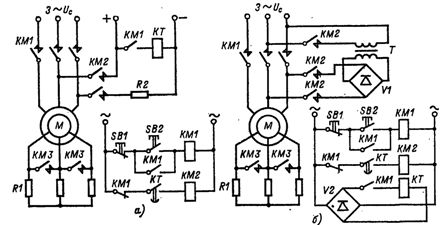
Схема динамического торможения асинхронного двигателя
а — есть сеть постоянного тока; б — нет сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме «а» дополнительным резистором R2, а в схеме «б» соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные на рисунке схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на схеме «б».
Основные недостатки динамического торможения: необходим источник постоянного тока и неэкономичность.
Торможение противовключением
Этот тормозной режим возникает при реверсе двигателя, а также широко используется для быстрой остановки двигателя.
Достоинством этого тормозного режима является быстрое торможение, т.к. тормозной момент действует на всем тормозном пути. Недостатки: большие токи и потери в обмотках при торможении, необходима аппаратура, контролирующая скорость вращения и отключающая двигатель от сети при его остановке. Если в приводе механизма двигатель часто работает в режиме реверса, приходится завышать его мощность из-за больших потерь мощности.