

5.5. Автоматическое регулирование температуры
Температура является показателем термодинамического состояния объекта и используется как выходная координата при автоматизации тепловых процессов. Характеристики объектов в системах регулирования температуры зависят от физических параметров процесса и конструкции аппарата. Поэтому общие рекомендации по выбору АСР температуры сформулировать невозможно и требуется тщательный анализ характеристик каждого конкретного процесса. Диапазон регулируемых температур невелик. Нижний предел этого диапазона ограничен минимальным значением температуры наружного воздуха (-40 °С), верхний — максимальной температурой теплоносителя (+150 °С).
К общим особенностям АСР температуры можно отнести значительную инерционность тепловых процессов и измерителей (датчиков) температуры. Поэтому одной из основных задач при создании АСР температуры является уменьшение инерционности датчиков.
Рассмотрим в качестве примера характеристики наиболее распространенного в инженерных системах манометрического термометра в защитном чехле (рис. 62). Структурную схему такого термометра можно представить в виде последовательного соединения четырех тепловых емкостей (рис. 63): защитного чехла, воздушной

Рис. 62. Принципиальная схема манометрического термометра:
1 — защитный чехол; 2 — воздушная прослойка; 3 — стенка термометра; 4 — рабочая жидкость
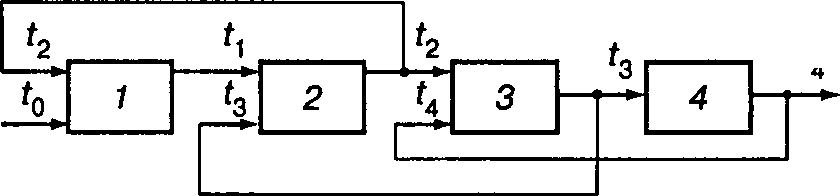
Рис. 63. Структурная схема манометрического термометра
![]()
где Gi — масса соответственно чехла, воздушной прослойки, стенки и жидкости; Срi — удельная теплоемкость; ti,ti-1 — температура; αi1, αi2 — коэффициенты теплоотдачи; Si1, Si2 — поверхности теплоотдачи. Как видно из уравнения (5.1), основными направлениями уменьшения инерционности датчиков температуры являются:
повышение коэффициентов теплоотдачи от среды к чехлу в результате правильного выбора места установки датчика; при этом скорость движения среды должна быть максимальной; при прочих равных условиях более предпочтительна установка термометров в жидкой фазе (по сравнению с газообразной), в конденсирующемся паре (по сравнению с конденсатом) и т. п.;
уменьшение теплового сопротивления и тепловой емкости защитного чехла в результате выбора его материала и толщины;
уменьшение постоянной времени воздушной прослойки за счет применения наполнителей (жидкости, металлической стружки);
у термопар рабочий спай припаивается к корпусу защитного чехла;
выбор типа первичного преобразователя; например, при выборе необходимо учитывать, что наименьшей инерционностью обладает термопара в малоинерционном исполнении, наибольшей - манометрический термометр. Каждая АСР температуры в СВВ создается для вполне конкретной цели и, следовательно, предназначена для работы в очень небольшом диапазоне. В связи с этим условия применения той или иной АСР определяют устройство и конструкцию как датчика, так и регулятора температуры.
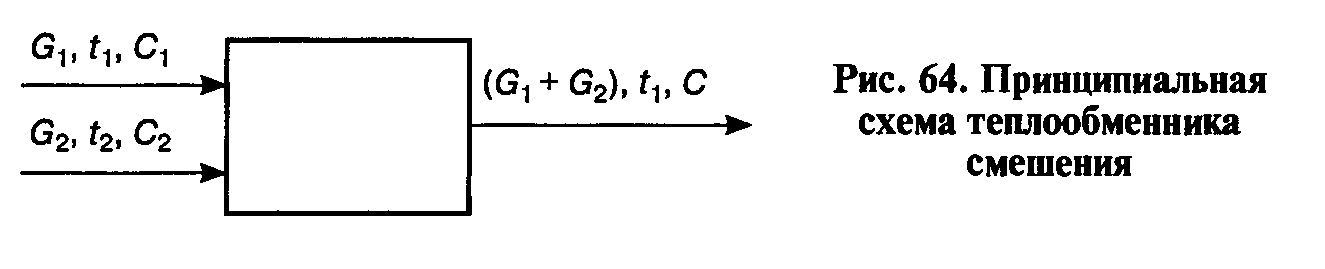
Рассмотрим подробнее вопрос регулирования температуры на примере теплообменников смешения, в которых для создания не- обходимого теплового режима используют передачу энергии путем смешения двух материальных потоков с расходами G1 и G2, температурами t1 , и t2 и удельными теплоемкостями С1 и С2 (рис. 64). Для регулирования температуры в таких аппаратах можно использовать несколько вариантов АСР.
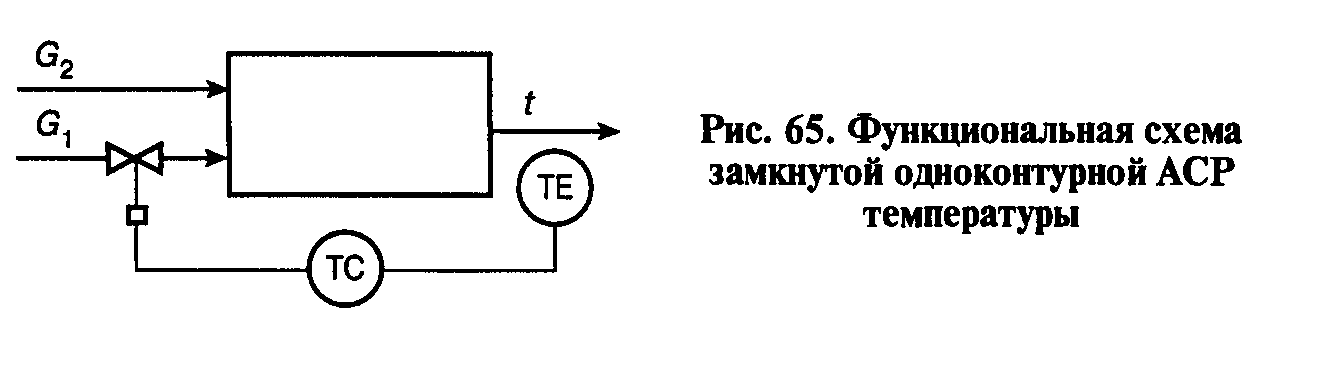
Вариант 1. Задача стабилизации выходной температуры смеси t решается применением одноконтурной замкнутой системы автоматического регулирования, в которой регулирующим воздействием является расход Gl (рис. 65). Использование регуляторов с интегральной составляющей в законе регулирования (ПИ- или ПИД- регулятор) гарантирует поддержание данного значения t в установившемся режиме, однако качество переходного процесса может оказаться неудовлетворительным при большой инерционности канала регулирования и сильных возмущениях.
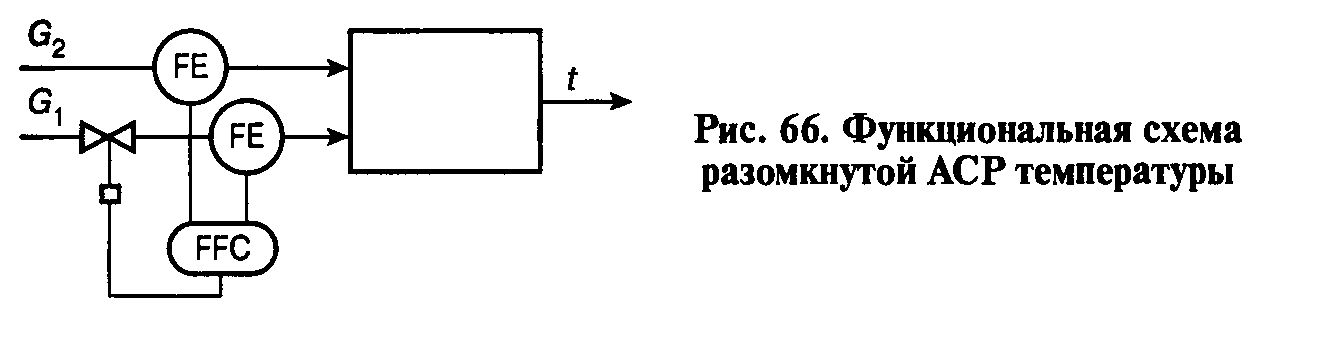
Вариант 2 включает систему регулирования соотношения рас- ходов G1 и G2 (рис. 66). Это разомкнутая система автоматического регулирования способна обеспечить инвариантность регулируемой температуры смеси t к возмущениям по расходу G2, однако при наличии любого другого возмущения температура не будет равна заданной.
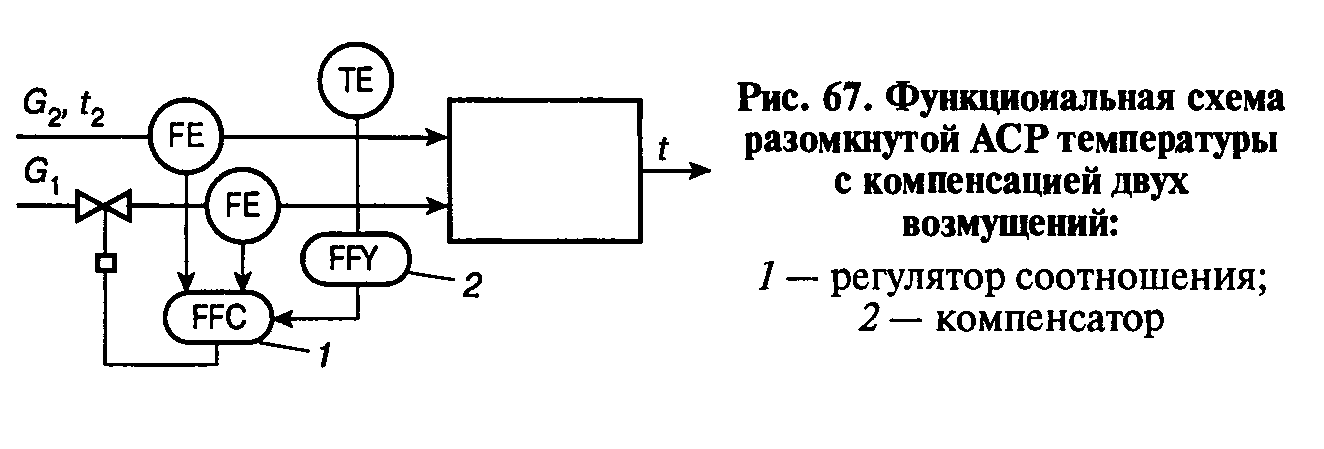
Вариант 3 (рис. 67) отличается от предыдущего введением коррекции коэффициента соотношения в зависимости от значения температуры второго потока t2, так что корректирующее устройство является компенсатором возмущения по t2. Таким образом, данная АСР может обеспечить независимость выходной темпера- туры t от двух основных возмущений — G2 и t2. Однако при наличии других возмущений (например, изменения теплопотерь в окружающую среду) температура будет отклоняться от заданной.
Варианты 4 и 5 являются разновидностями комбинированных АСР, в которых обеспечивается компенсация основных возмущений и вводится обратная связь по регулируемой координате.
Вариант 4 — система автоматического регулирования соотношения расходов G{ и G2 с коррекцией коэффициента соотношения по выходной температуре смеси (рис. 68), т.е. двухкаскадная
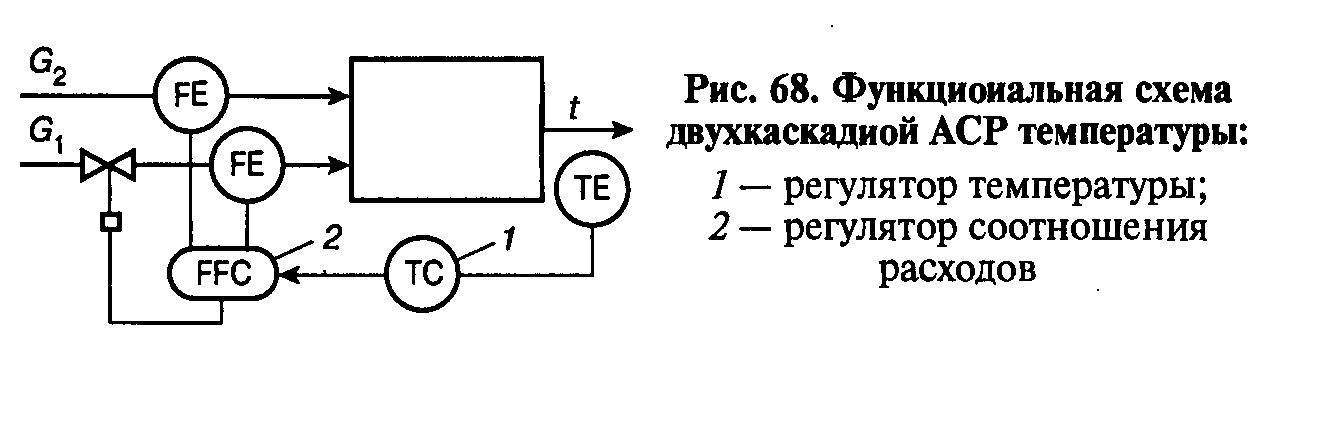
Из рассмотренных вариантов АСР температуры наилучшее качество регулирования обеспечивают два последних варианта. При этом в случае приборной реализации предпочтительнее 4-й вариант, который легко выполняется на обычных серийных регуляторах. При использовании микропроцессорной техники или ЭВМ реализация любой из этих систем не представляет затруднений.
Основным (внешним) регулятором является регулятор температуры, а вспомогательным (внутренним) — регулятор соотношения, осуществляющий компенсацию возмущения по расходу G2.
Вариант 5 — система автоматического регулирования температуры смеси по двум возмущениям — G2 и t2, т.е. комбинированная АСР. В этой схеме динамический компенсатор (рис. 69) со- держит вычислительное устройство для расчета корректирующей поправки на задание по выходной температуре t регулятору в зависимости от расхода G2 и температуры второго потока t2
Лекция №14