

4.6. Система автоматической фокусировки
В системах вывода информации из компьютера с перемещающейся ка_
реткой, управление которой описано в предыдущем разделе, возможно
изменение расстояния между оптическим блоком и поверхностью записи
из_за биения барабана, отклонения образующей барабана от прямой ли_
нии, погрешностей изготовления ходового винта каретки и т. п. По этой
причине происходит расфокусировка записывающего луча и размывание
растровых точек на фотопленке или формной пластине. Компенсация
этого дефекта осуществляется системой автоматической фокусировки,
принцип действия которой можно пояснить при помощи рис. 4.17.
На каретке 1, перемещающейся при помощи ходового винта 11,
установлен оптический блок 2, формирующий модулированный сиг_
налами компьютера лазерный луч 3. Этот луч при помощи объектива
4, установленного на платформе 5, фокусируется на светочувствитель_
ный материал 16 (фотопленка или формная пластина).
В случае приближения или удаления материала 16 по отношению
к объективу 4 происходит расфокусировка лазерного луча и размыва_
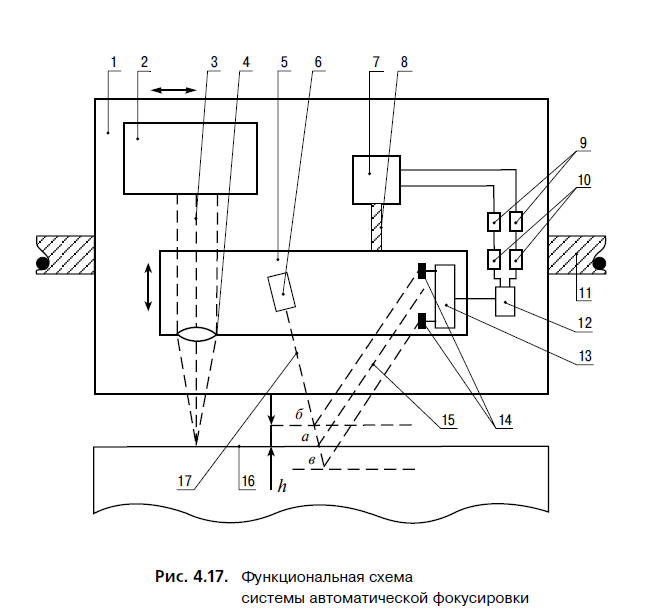
ние растровой точки. Компенсация этого дефекта осуществляется пе_
ремещением платформы 5 в направлении, перпендикулярном переме_
щению каретки 1. Это перемещение осуществляется шаговым двига_
телем 7, вращающим винт 8.
Измерение взаимного положения объектива 4 и поверхности 16
осуществляется при помощи осветителя 6 и двух фотоприемников 14,
закрепленных на платформе 5. Мощность излучения и длина волны
осветителя 6 выбираются таким образом, чтобы световой луч 17 прак_
тически полностью отражался от поверхности 16 без взаимодействия
со светочувствительным материалом. При номинальном расстоянии
между объективом 4 и поверхностью 16 луч 17 падает на поверхность
в точке 9, при этом отраженный луч 15 одинаково засвечивает
фотоприемники 14. Эти фотоприемники включены в мостовую изме_
рительную схему 13, в измерительную диагональ которой помещен
аналогово_цифровой преобразователь. При одинаковой засветке фо_
топриемников 14 мостовая схема сбалансирована и в микроконтрол_
лер 12 с выхода АЦП вводится нулевой сигнал ошибки.
Если в силу каких_либо причин поверхность 16 приблизится
к объективу 4, то луч 17 осветителя 6 будет падать на эту поверхность
в точке :, вследствие чего отраженный луч 15 будет засвечивать в боль_
шей степени верхний фотоприемник 14 по сравнению с нижним.
Отметим, что на рис. 4.17 не показаны оптические элементы, форми_
рующие лучи 15 и 17. При большей засветке одного из фотоприемни_
ков мостовая измерительная схема разбалансируется и в управляющий
контроллер вводится ненулевой сигнал ошибки.
В случае увеличения расстояния между объективом 14 и светочув_
ствительным материалом место падения луча 17 перемещается
в точку ', отраженный луч в большей степени засвечивает нижний фо_
топриемник и в этом случае сигнал ошибки изменяет знак.
Микроконтроллер 12 на основании введенного значения сигнала
ошибки рассчитывает угловое положение поля статора ШД 7, это
положение обеспечивается соответствующими значениями напряже_
ний питания синусной и косинусной обмоток двигателя.
Математическая модель объекта управления, входной величиной
которой является угол положения поля статора α,, а выходной величи_
ной — цифровое выражение ε отклонения ; отражающей поверхности
16 от номинального, выводится по процедуре, аналогичной приведен_
ной в предыдущем разделе и имеет вид

где a1 — коэффициент передачи винтовой передачи 8, a2 — коэффици_
ент передачи измерительной схемы, a3— коэффициент передачи ана_
лого_цифрового преобразователя, при этом
![]()
Синтез алгоритма управляющего контроллера аналогичен приве_
денному в предыдущем разделе. В рассматриваемой системе,
очевидно, что ане=0
.